
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
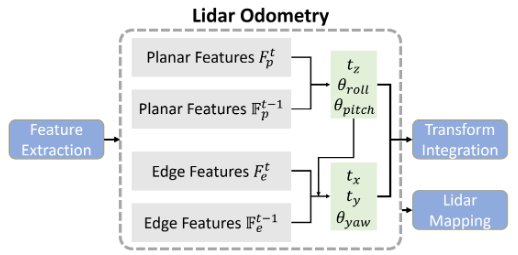
The package performs segmentation before feature extraction.
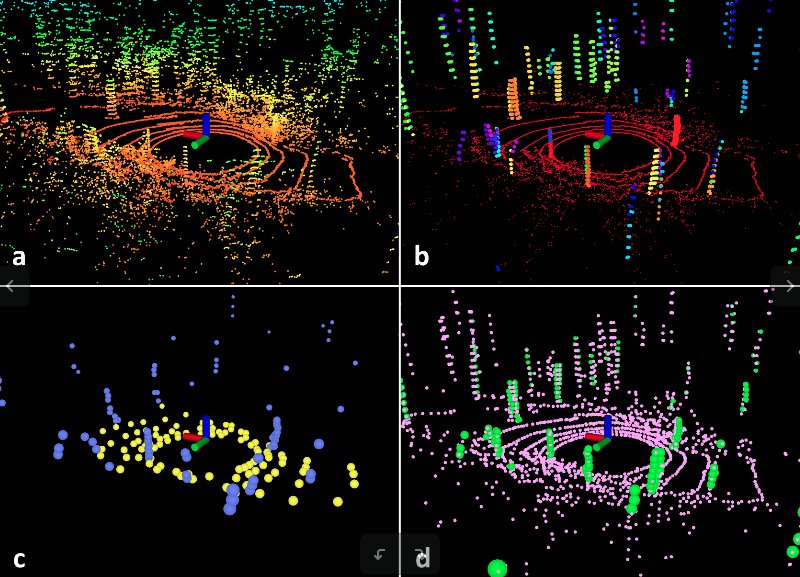
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | 支持ROS2 Humble版本的LeGO-LOAM |
| Checkout URI | https://github.com/fishros/lego-loam-ros2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lego_loam_sr | 1.0.0 |
| cloud_msgs | 1.0.0 |
README
LeGO-LOAM-ROS2
This code is a fork from LeGO-LOAM-SR to migrate LeGO-LOAM algorithm to ROS2 humble.
This code only done minor change to migrate LeGO-LOAM-SR from ROS2 dashing to ROS2 humble, since there are some syntax difference in rclcpp between dashing and humble.
This code does not modify and/or improve the original LeGO-LOAM algorithm.
1. About the original LeGO-LOAM
LeGO-LOAM contains code for a lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontal) and it outputs 6D pose estimation in real-time. A demonstration of the system can be found here -> https://www.youtube.com/watch?v=O3tz_ftHV48
2. Dependencies
- test in Ubuntu 20.04
- ROS1 Noetic
- ROS2 humble
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
sudo apt install python3-colcon-common-extensions
3. Compile
You can use the following commands to download and compile the package.
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/Thuniinae/LeGO-LOAM-ROS2.git
cd ..
colcon build
4. The system
LeGO-LOAM is speficifally optimized for a horizontally placed lidar on a ground vehicle. It assumes there is always a ground plane in the scan.
The package performs segmentation before feature extraction.
Lidar odometry performs two-step Levenberg Marquardt optimization to get 6D transformation.
5. New sensor and configuration
To customize the behavior of the algorithm or to use a lidar different from VLP-16, edit the file config/loam_config.yaml.
One important thing to keep in mind is that our current implementation for range image projection is only suitable for sensors that have evenly distributed channels. If you want to use our algorithm with Velodyne VLP-32c or HDL-64e, you need to write your own implementation for such projection.
If the point cloud is not projected properly, you will lose many points and performance.
The IMU has been remove from the original LeGO-LOAM code.
6. Run the package
System can be started using the following command:
echo source /opt/ros/noetic/setup.bash >> .bashrc
echo source /opt/ros/humble/setup.bash >> .bashrc
echo source ~/dev_ws/install/setup.bash >> .bashrc
open another terminal
ros2 launch lego_loam_sr run.launch.py
- for some unknown reason, launching the package right after sourcing ros and workspace in the same terminal may cause error.
Some sample bags can be downloaded from here.
6.1 Run ROS1 rosbag
To use rosbags from ROS1, plugin rosbag_v2 can be usefull.
Play rosbag using rosbag_v2:
File truncated at 100 lines see the full file