No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
lidar_cluster_ros2 repositoryclustering detection ros lidar ros2 sze formulastudent szenergy lidar_cluster |
Repository Summary
| Description | LIDAR pointcloud clustering |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | clustering detection ros lidar ros2 sze formulastudent szenergy |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_cluster | 0.0.0 |
README
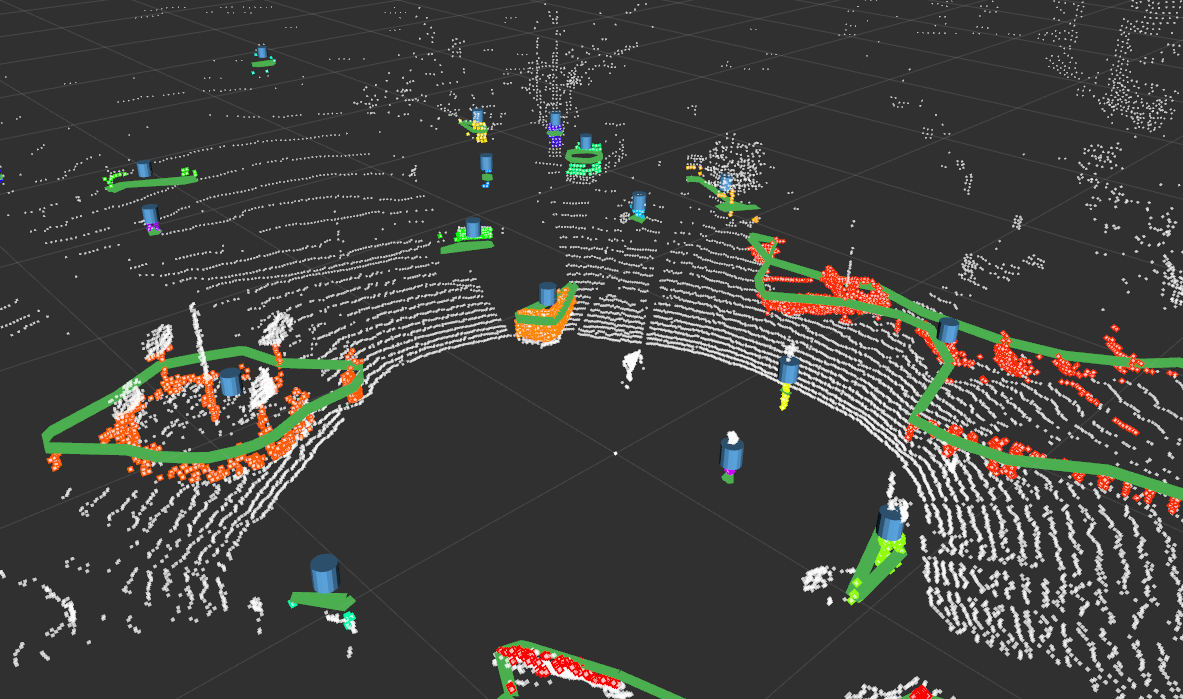
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
CONTRIBUTING
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.