No version for distro humble showing github. Known supported distros are highlighted in the buttons above.

|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
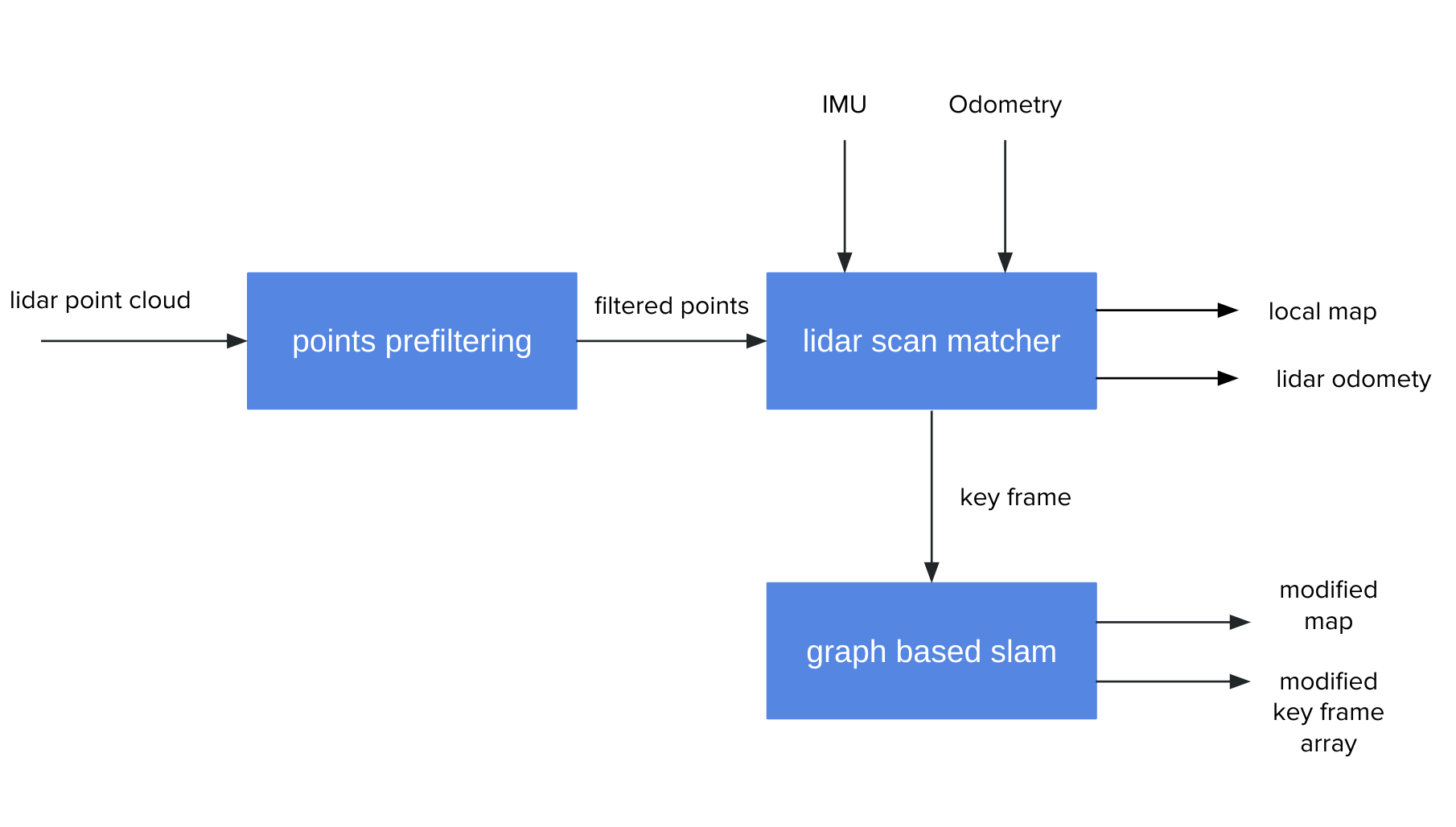
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No version for distro jazzy showing github. Known supported distros are highlighted in the buttons above.
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No version for distro kilted showing github. Known supported distros are highlighted in the buttons above.
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No version for distro rolling showing github. Known supported distros are highlighted in the buttons above.
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No version for distro galactic showing github. Known supported distros are highlighted in the buttons above.
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No version for distro iron showing github. Known supported distros are highlighted in the buttons above.
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No version for distro melodic showing github. Known supported distros are highlighted in the buttons above.
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No version for distro noetic showing github. Known supported distros are highlighted in the buttons above.
|
|
lidar_graph_slam repositorygraph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree