
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)

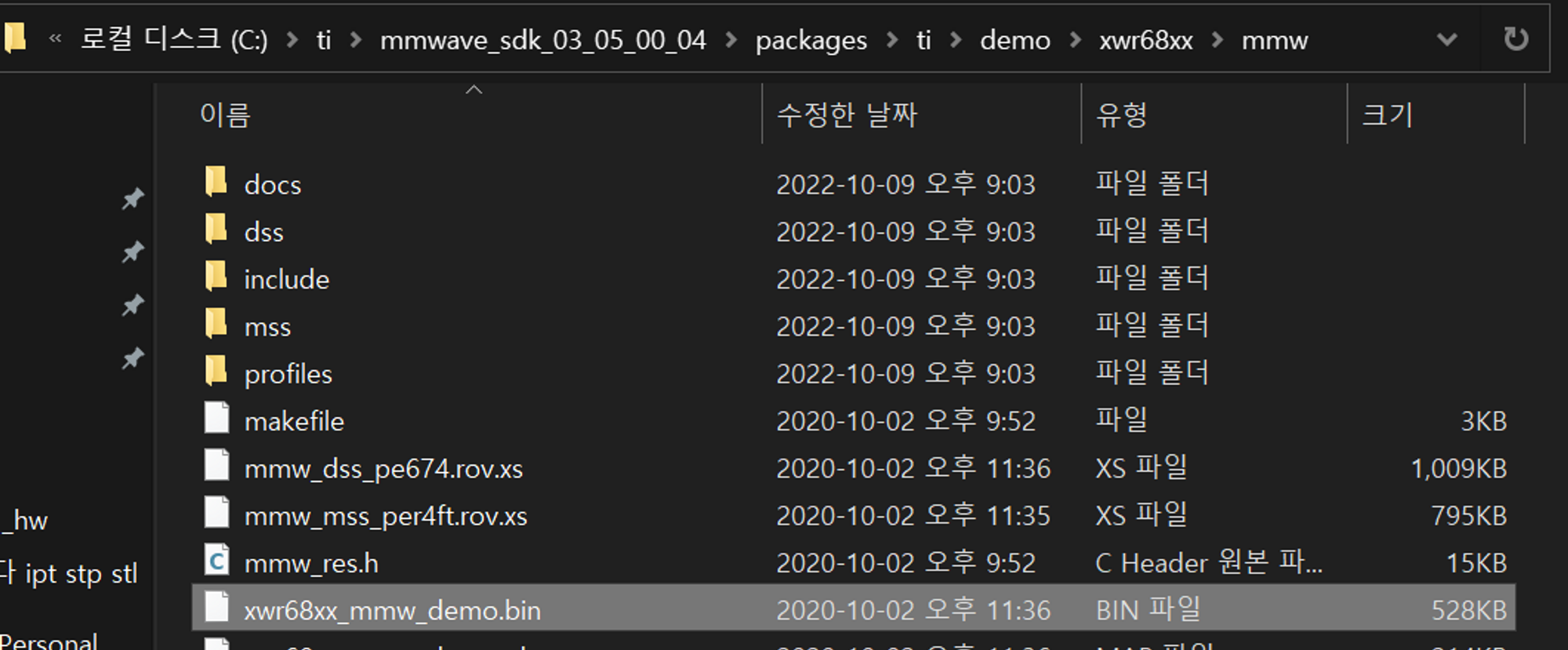
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
mmwave_ti_ros repositoryserial ti_mmwave_ros2_examples ti_mmwave_ros2_interfaces ti_mmwave_ros2_pkg |
ROS Distro
|
Repository Summary
| Description | Ti mmWave Radar ROS/ROS 2 packages & Applications |
| Checkout URI | https://github.com/kimsooyoung/mmwave_ti_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| serial | 1.2.1 |
| ti_mmwave_ros2_examples | 0.0.0 |
| ti_mmwave_ros2_interfaces | 0.0.0 |
| ti_mmwave_ros2_pkg | 0.0.0 |
README
TI mmWave ROS 2 Package (Customized)
Radar can overcome some cases that other sensors cannot. Such as transparent, metalic objects, dark and rainy area. TI’s mmWave is cheap, stable, and powerful sensor for radar sensing. And this package is made for ROS 2 compatibility for that.
![]()
Quick start guide
- Mount your mmWave device with power supply and connect a micro-USB cable to host machine with ROS 2. This pkg is vertified in below systems
- Ubuntu 18.04 & ROS 2 eloquent
- Ubuntu 20.04 & ROS 2 foxy
- NVIDIA Jetpack 4 & ROS 2 eloquent
Here’s example of mount (designed by Lee, Jongmyeong)
- Download SDK 3.0 or above from here and use UNIFLASH to flash xwrXXXX_mmw_demo.bin to your device. Do not forget SOP2 jumper when flashing.
I recommend to check with Demo Visualizer before launching ROS 2 demo
- Install apt Dependencies
# install linux pkgs
sudo apt-get install libpthread-stubs0-dev
sudo apt install ros-eloquent-perception-pcl -y
sudo apt install ros-eloquent-composition -y
- Clone this repo and build ROS 2 packages
# cd `<workspace dir>/src`
git clone https://github.com/kimsooyoung/mmwave_ti_ros.git
# pkg build
colcon build --symlink-install --packages-select serial
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_interfaces
source install/local_setup.bash
colcon build --symlink-install --packages-select ti_mmwave_ros2_pkg
source install/local_setup.bash
# For this package, pcl common is required, But don't be afraid, ROS Installing contains PCL
colcon build --symlink-install --packages-select ti_mmwave_ros2_examples
source install/local_setup.bash
If Boost error occurs during building, check your boost version with correct symbolic link (ref by stackoverflow)
# check boost version
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
# symbolic link reconfigure
sudo ln -s /usr/lib/aarch64-linux-gnu/libboost_system.so.1.65.1 /usr/lib/libboost_system.so
- Enable command and data ports on Linux:
# validate usb connection
$ ls -l /dev/ | grep mmWave
mmWave_00ED33DD_00 -> ttyUSB0
mmWave_00ED33DD_01 -> ttyUSB1
# give permission to usb pins
sudo chmod 666 /dev/ttyUSB0
sudo chmod 666 /dev/ttyUSB1
Note: If multiple sensors are used, enable additional ports
/dev/ttyACM2and/dev/ttyACM3, etc. the same as this step.
- Launch ROS 2 Command
ros2 launch ti_mmwave_ros2_pkg eloquent_composition.launch.py
Bad news. Main node uses pthread instead of ROS 2 lifecycle. Therefore, you must kill process manually for clearly exit program.
kill -9 \`ps faux | grep ti_mmwave_ros2_ | awk '{print $2}'\`
kill -9 \`ps faux | grep component | awk '{print $2}'\`
File truncated at 100 lines see the full file