
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
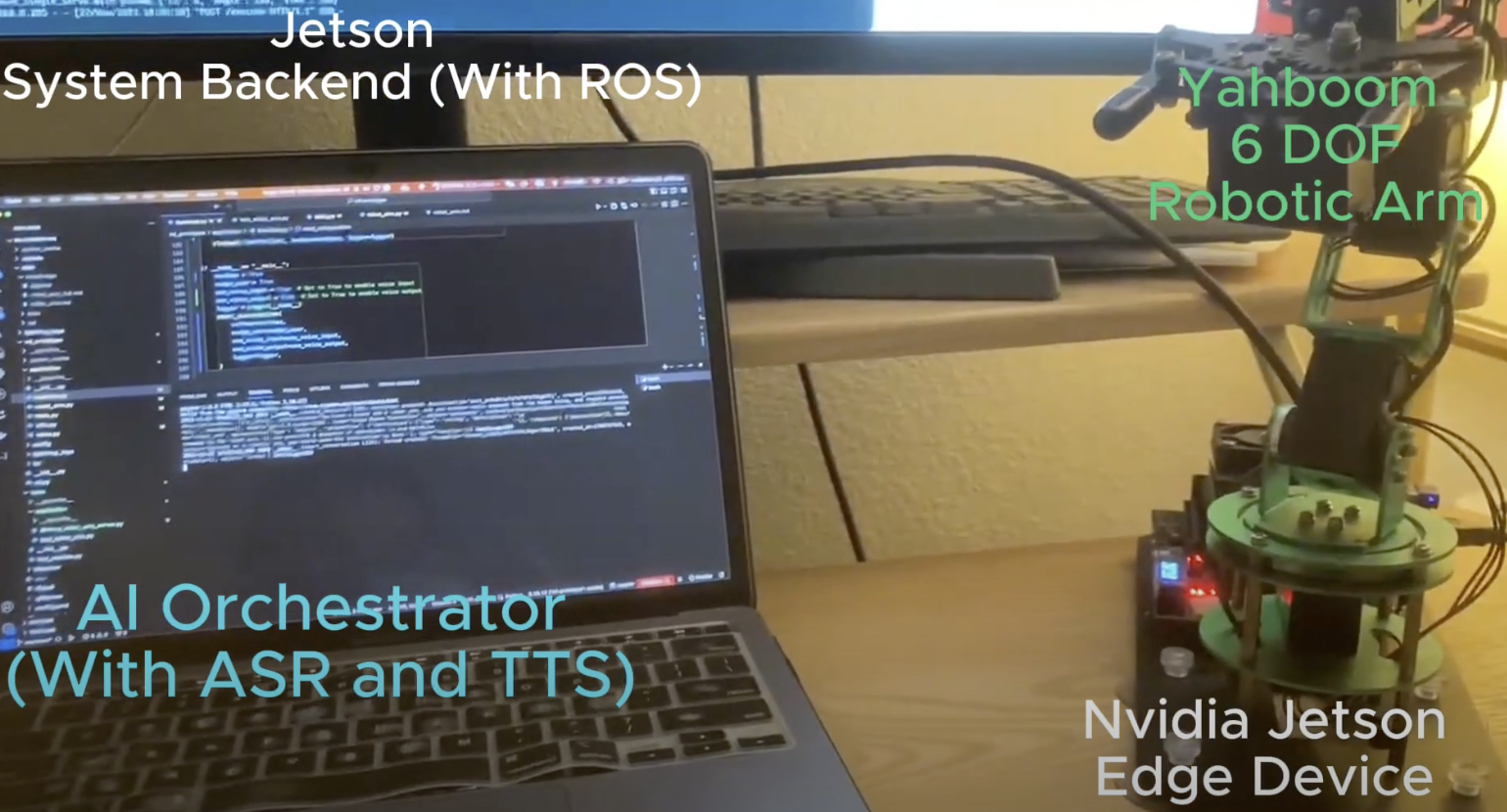
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[ ]
]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
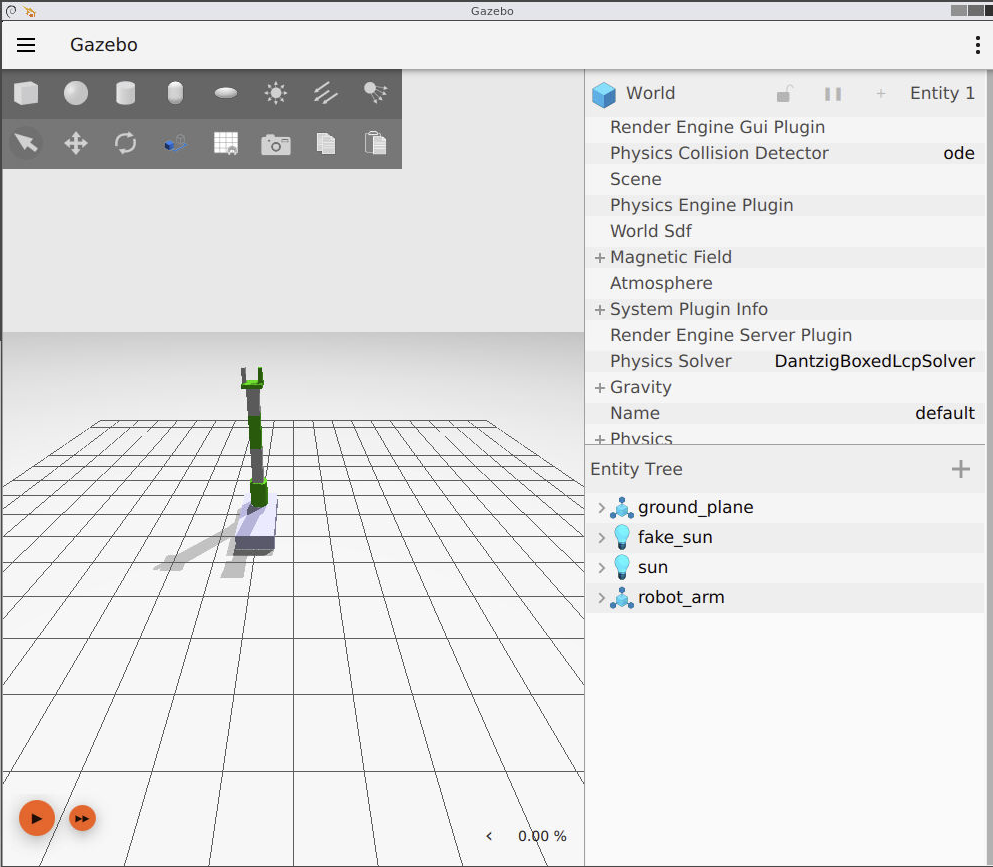
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
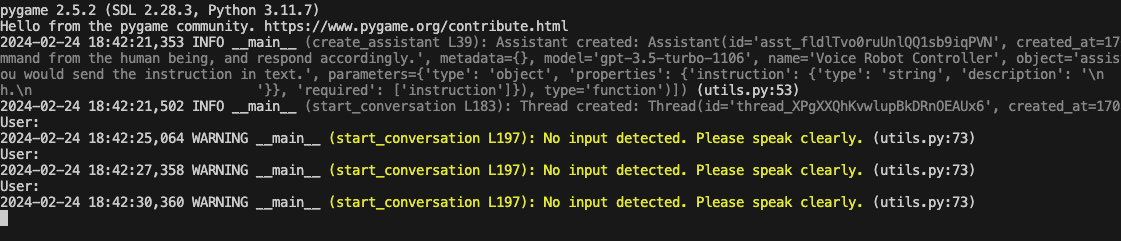
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。
CONTRIBUTING
Repository Summary
| Description | Demo of robotics. |
| Checkout URI | https://github.com/small-thinking/mnlm.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robot_arm | 0.0.0 |
README
mnlm
机器人臂演示的源代码(参见 https://www.bilibili.com/video/BV1ub4y1T7Jt/)。
构建并启动Docker容器
- 将 .env.template 更名为 .env 并添加 OPEN_API_KEY。
- 安装 Docker 和 Docker Compose。
docker-compose up --build -d
此命令将为服务器端构建docker镜像,并启动docker容器。 用户也可以通过浏览器访问 http://localhost:8080/vnc.html 来访问模拟环境。
[]
- 登录到docker容器。 如果您使用vscode,您可以安装 Dev Container 扩展并打开正在运行的容器。否则,您可以通过运行以下命令登录到docker容器:
docker exec -it mnln-ros_dev_env-1 /bin/bash
- 启动ROS2模拟。
cd /home/small-thinking/mnlm/mnlm/robot/robot_arm_ws
colcon build --symlink-install ; source install/setup.bash ; ros2 launch robot_arm robot_arm.launch.py
您应该会看到服务器端程序启动。并且您可以访问 http://localhost:8080/vnc.html 来看到Gazebo Fortress模拟环境。
- 在您的宿主机上。您可以运行命令以启动基于声音的UI。
进入项目文件夹:
cd mnlm/client/gpt_control
python assistant.py
然后您可以看到客户端启动,并且您将被提示告诉机器人要做什么。