Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) |  |
|
| ROS 2 Jazzy (u24.04) |  |
|
| ROS 2 Kilted (u24.04) |  |
|
| ROS 2 Rolling (u24.04) |  |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 |  |
| ROS 2 Iron (u22.04) |  |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
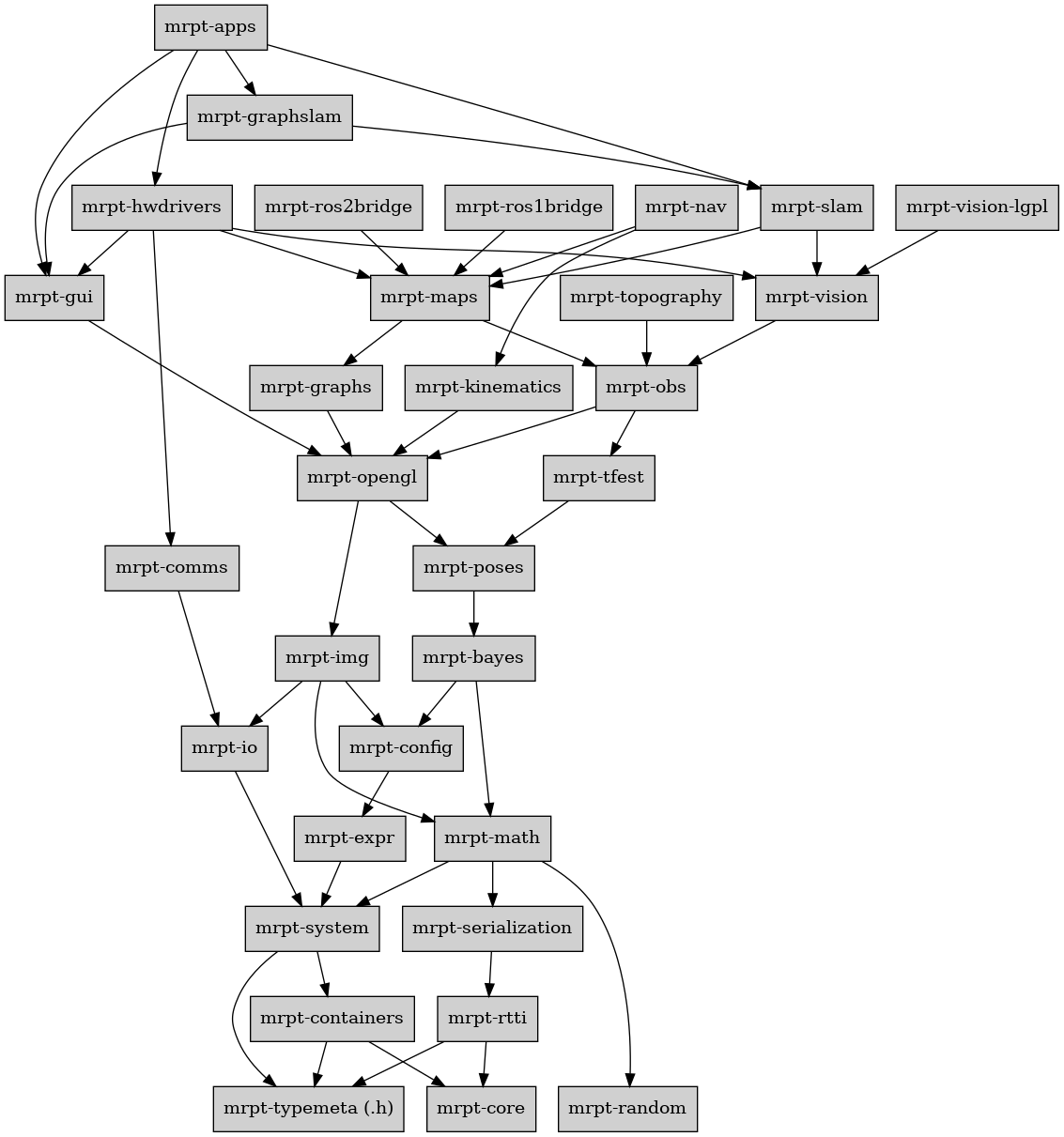
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING

|
mrpt_ros repositorymrpt_apps mrpt_libapps mrpt_libbase mrpt_libgui mrpt_libhwdrivers mrpt_libmaps mrpt_libmath mrpt_libnav mrpt_libobs mrpt_libopengl mrpt_libposes mrpt_libslam mrpt_libtclap |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/MRPT/mrpt_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mrpt_apps | 2.15.12 |
| mrpt_libapps | 2.15.12 |
| mrpt_libbase | 2.15.12 |
| mrpt_libgui | 2.15.12 |
| mrpt_libhwdrivers | 2.15.12 |
| mrpt_libmaps | 2.15.12 |
| mrpt_libmath | 2.15.12 |
| mrpt_libnav | 2.15.12 |
| mrpt_libobs | 2.15.12 |
| mrpt_libopengl | 2.15.12 |
| mrpt_libposes | 2.15.12 |
| mrpt_libslam | 2.15.12 |
| mrpt_libtclap | 2.15.12 |
README
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) | |
|
| ROS 2 Jazzy (u24.04) | |
|
| ROS 2 Kilted (u24.04) | |
|
| ROS 2 Rolling (u24.04) | |
| EOL Distro | Last Release |
|---|---|
| ROS 1 Noetic @ u20.04 | |
| ROS 2 Iron (u22.04) | |
mrpt-ros
Fine-grained ROS packages for MRPT libraries and apps. This repository is a replacement for
the usage of the upstream MRPT/mrpt repo directly as the ROS
package mrpt2.
Mapping between ROS packages <==> MRPT C++ libraries
These are the <depend>...</depend> tags you need to include in
your project package.xml depending on what C++ libraries you use:
| ROS 2 package name | Included MRPT libraries |
|---|---|
<depend>mrpt_libbase</depend> |
mrpt-io, mrpt-serialization, mrpt-random, mrpt-system, mrpt-rtti, mrpt-containers, mrpt-typemeta, mrpt-core, mrpt-random, mrpt-config, mrpt-expr |
<depend>mrpt_libgui</depend> |
mrpt-gui |
<depend>mrpt_libhwdrivers</depend> |
mrpt-hwdrivers, mrpt-comms |
<depend>mrpt_libapps</depend> |
mrpt-apps |
<depend>mrpt_libmaps</depend> |
mrpt-maps, mrpt-graphs |
<depend>mrpt_libmath</depend> |
mrpt-math |
<depend>mrpt_libnav</depend> |
mrpt-nav, mrpt-kinematics |
<depend>mrpt_libobs</depend> |
mrpt-obs, mrpt-topography |
<depend>mrpt_libopengl</depend> |
mrpt-opengl, mrpt-img |
<depend>mrpt_libposes</depend> |
mrpt-poses, mrpt-tfest, mrpt-bayes |
<depend>mrpt_libros_bridge</depend> |
mrpt-ros2bridge (Moved to its own repo) |
<depend>mrpt_libslam</depend> |
mrpt-slam, mrpt-vision |
<depend>mrpt_libtclap</depend> |
mrpt-tclap |
<depend>mrpt_apps</depend> |
Executable applications: RawLogViewer, rawlog-edit, rawlog-grabber, SceneViewer3D, etc. |
<depend>python_mrpt</depend> |
pymrpt wrapper |
Keep in mind that including one C++ library automatically includes all its dependencies, so you do not need to list them all:
Usage
To get binary packages via apt install from the ROS build farm,
install required packages like:
sudo apt install ros-${ROS_DISTRO}-mrpt-libbase # or any other as needed
Alternatively, if you need to build MRPT from sources (active MRPT developers & testers only), clone this repo and build with colcon as usual:
cd ~/ros2_ws/src
git clone --recursive https://github.com/MRPT/mrpt_ros.git
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --parallel-workers 2 --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
Build status matrix
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| mrpt_apps | ||||
| mrpt_libapps | ||||
| mrpt_libbase | ||||
| mrpt_libgui | ||||
| mrpt_libhwdrivers | ||||
| mrpt_libmaps | ||||
| mrpt_libmath | ||||
| mrpt_libnav | ||||
| mrpt_libobs | ||||
| mrpt_libopengl | ||||
| mrpt_libposes | ||||
| mrpt_libslam | ||||
| mrpt_libtclap |
Motivation for this repository vs older mrpt2 package
- Faster build times (for each individual package). It was common to see ROS build farms to time out.
- Finer grained dependencies: ROS users can now specify in their
<depend>tags a part of MRPT only, not the whole thing.
So, the ROS package mrpt2 is obsolete now (Jul, 2024).
License
BSD-3