
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro humble. Known supported distros are highlighted in the buttons above.
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro kilted. Known supported distros are highlighted in the buttons above.
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro rolling. Known supported distros are highlighted in the buttons above.
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics control_input_msgs joystick_input keyboard_input unitree_joystick_input leg_pd_controller ocs2_quadruped_controller rl_quadruped_controller unitree_guide_controller anymal_c_description lite3_description x30_description cyberdog_description magicdog_description a1_description aliengo_description b2_description go1_description go2_description gz_quadruped_hardware hardware_unitree_sdk2 controller_common gz_quadruped_playground qpoases_colcon |
Repository Summary
| Description | ROS2-Control implementations for Quadruped robots, include sim2real |
| Checkout URI | https://github.com/legubiao/quadruped_ros2_control.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | rl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| control_input_msgs | 0.0.0 |
| joystick_input | 0.0.0 |
| keyboard_input | 0.0.0 |
| unitree_joystick_input | 0.0.0 |
| leg_pd_controller | 0.0.0 |
| ocs2_quadruped_controller | 0.0.0 |
| rl_quadruped_controller | 0.0.0 |
| unitree_guide_controller | 0.0.0 |
| anymal_c_description | 0.0.0 |
| lite3_description | 0.0.0 |
| x30_description | 0.0.0 |
| cyberdog_description | 0.0.0 |
| magicdog_description | 0.0.0 |
| a1_description | 0.0.0 |
| aliengo_description | 0.0.0 |
| b2_description | 1.0.0 |
| go1_description | 0.0.0 |
| go2_description | 1.0.0 |
| gz_quadruped_hardware | 2.0.6 |
| hardware_unitree_sdk2 | 0.0.0 |
| controller_common | 0.0.0 |
| gz_quadruped_playground | 0.0.0 |
| qpoases_colcon | 0.0.0 |
README
Quadruped ROS2 Control
This repository contains the ros2-control based controllers for the quadruped robot.
- Controllers: contains the ros2-control controllers
- Commands: contains command node used to send command to the controller
- Descriptions: contains the urdf model of the robot
- Hardwares: contains the ros2-control hardware interface for the robot
Warning: Default branch was developed under ROS2 Jazzy. For ROS2 Humble, please check out humble branch.
Todo List:
-
[2025-02-23] Add Gazebo Playground
- OCS2 controller for Gazebo Simulation
- Refactor FSM and Unitree Guide Controller
- [2025-03-30] Add Real Go2 Robot Support
- [2025-05-20] Isaac Sim Support
- OCS2 Perceptive locomotion demo
Video on Real Unitree Go2 Robot:

1. Quick Start
- rosdep
cd ~/ros2_ws
rosdep install --from-paths src --ignore-src -r -y
- Compile the package
colcon build --packages-up-to unitree_guide_controller go2_description keyboard_input --symlink-install
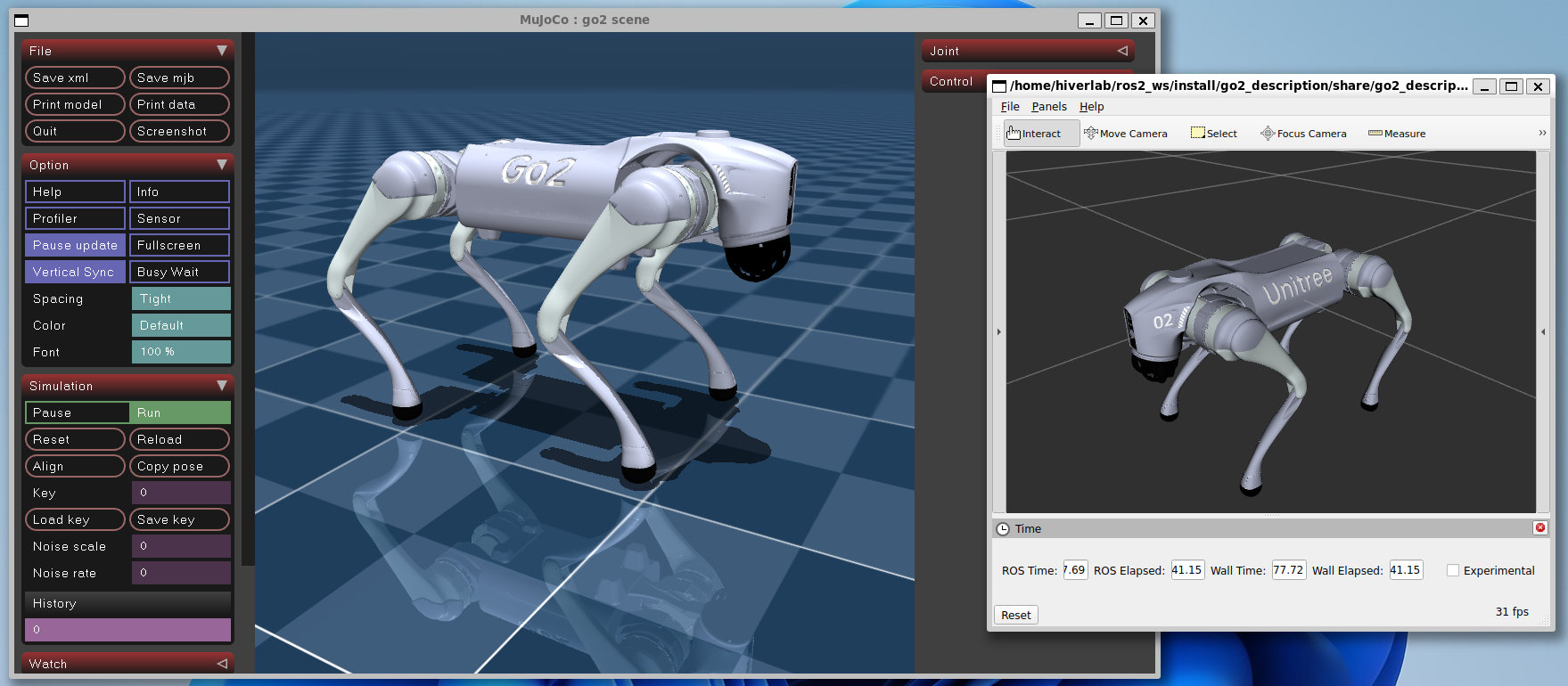
1.1 Mujoco Simulator or Real Unitree Robot
Warning: CycloneDDS ROS2 RMW may conflict with unitree_sdk2. If you cannot launch unitree mujoco simulation without
sudo, then you cannot usedunitree_mujoco_hardware. This conflict could be solved by one of below two methods:
- Uninstall CycloneDDS ROS2 RMW, used another ROS2 RMW, such as FastDDS [Recommended].
- Follow the guide in unitree_ros2 to configure the ROS2 RMW by compiling cyclone dds.
- Compile Unitree Hardware Interfaces
cd ~/ros2_ws
colcon build --packages-up-to hardware_unitree_sdk2
- Follow the guide in unitree_mujoco to launch the unitree mujoco go2 simulation
- Launch the ros2-control
source ~/ros2_ws/install/setup.bash
ros2 launch unitree_guide_controller mujoco.launch.py
- Run the keyboard control node
source ~/ros2_ws/install/setup.bash
ros2 run keyboard_input keyboard_input
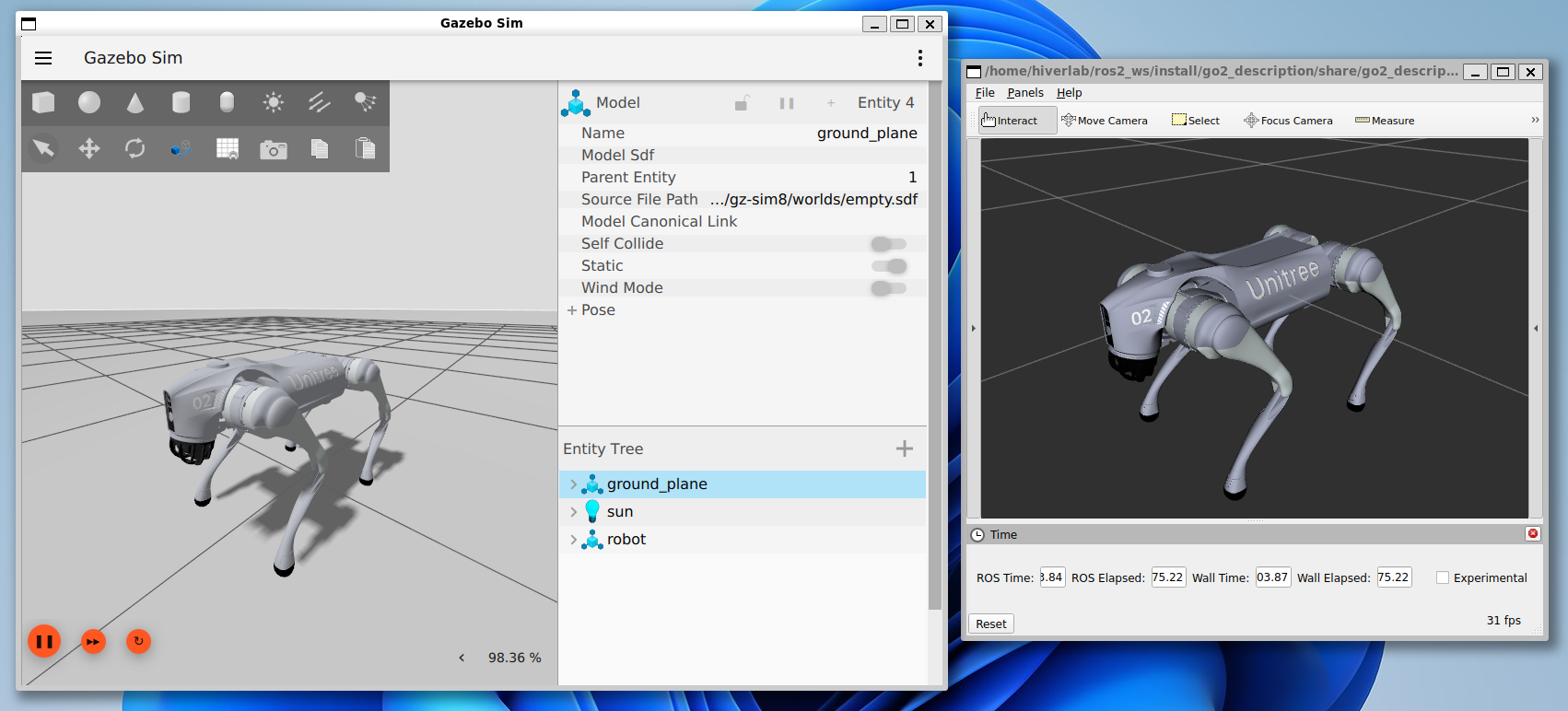
1.3 Gazebo Harmonic Simulator
- Install Gazebo
sudo apt-get install ros-jazzy-ros-gz
- Compile Gazebo Playground
colcon build --packages-up-to gz_quadruped_playground --symlink-install
- Launch the ros2-control
source ~/ros2_ws/install/setup.bash
ros2 launch unitree_guide_controller gazebo.launch.py
- Run the keyboard control node
source ~/ros2_ws/install/setup.bash
ros2 run keyboard_input keyboard_input
For more details, please refer to the unitree guide controller and go2 description.
What’s Next
Congratulations! You have successfully launched the quadruped robot in the simulation. Here are some suggestions for you to have a try:
- More Robot Models could be found at description
-
Try more controllers.
- OCS2 Quadruped Controller: Robust MPC-based controller for quadruped robot
- RL Quadruped Controller: Reinforcement learning controller for quadruped robot
-
Simulate with more sensors
- Gazebo Quadruped Playground: Provide gazebo simulation with lidar or depth camera.
-
Real Robot Deploy
- Unitree Go2 Robot: Check here about how to deploy on go2 robot.
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro galactic. Known supported distros are highlighted in the buttons above.
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro iron. Known supported distros are highlighted in the buttons above.
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro melodic. Known supported distros are highlighted in the buttons above.
|
|
quadruped_ros2_control repositoryrl gazebo xiaomi legged-robots mujoco ros2-control unitree ocs2 deep-robotics |
No version for distro noetic. Known supported distros are highlighted in the buttons above.