
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
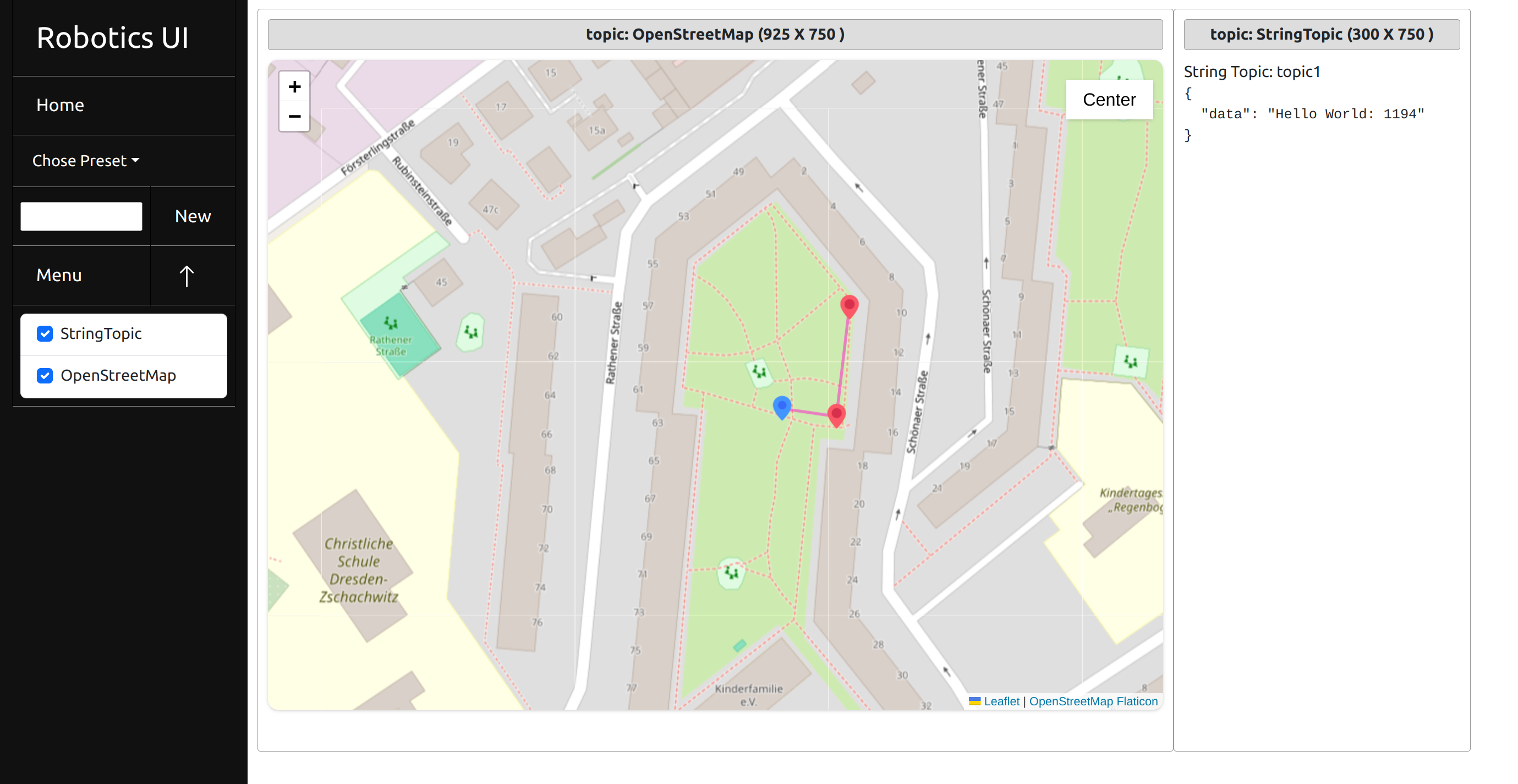
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
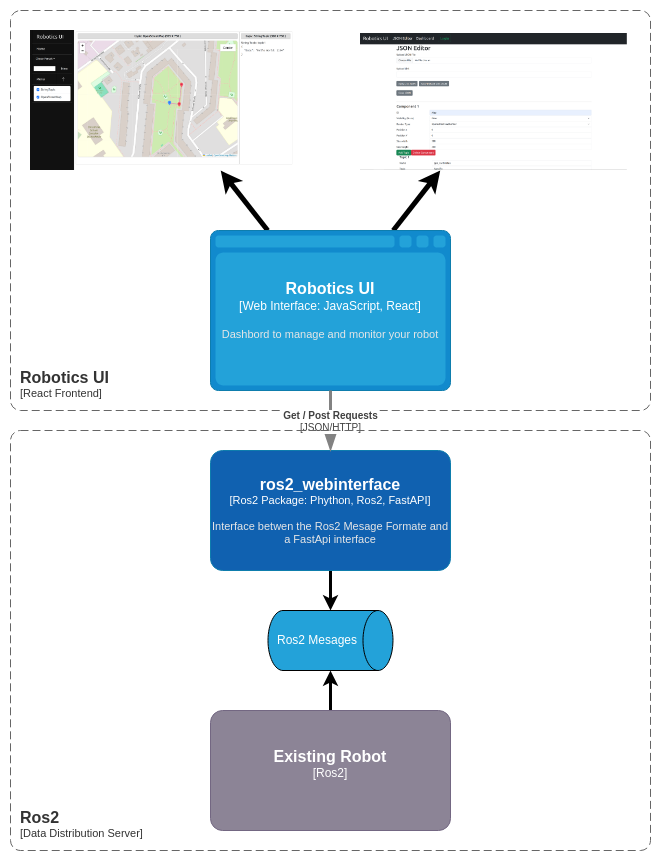
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
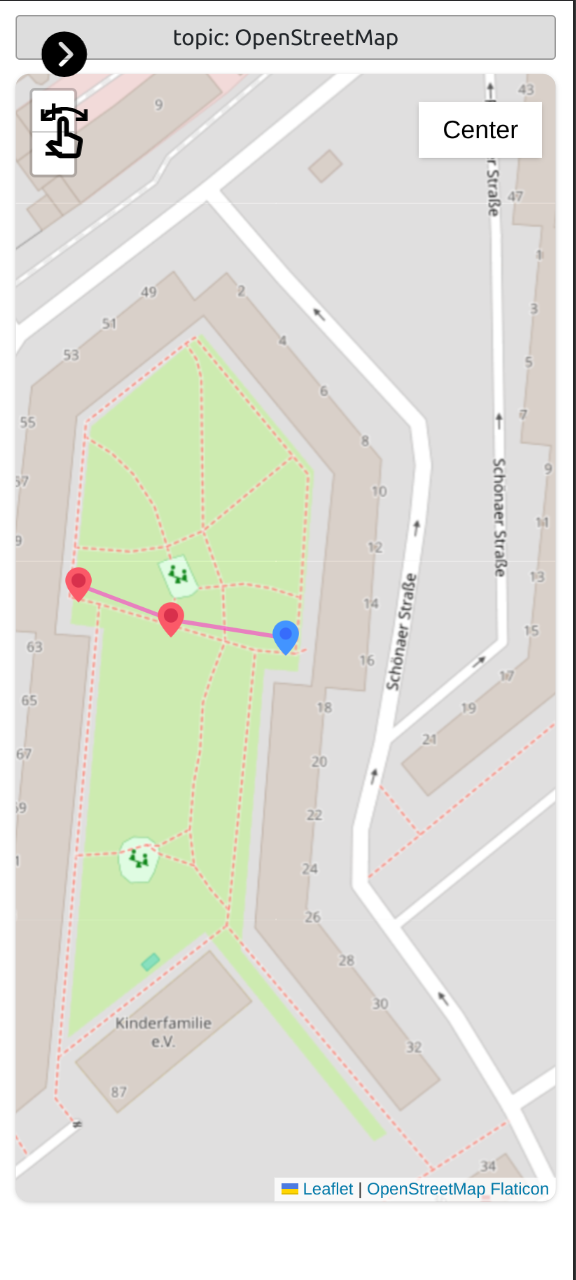
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/sciotaio/robotics-ui.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_webinterface | 0.0.0 |
README
Robotics UI
- Robotics UI
Robotics UI is a web interface solution for ROS 2 powered robots using React and ROS 2 Iron.
Our vision is to create software that allows you to instantly add a web interface to every ROS 2 robot by configuring a simple JSON file.
The tool consists of two parts: a Python backend, which acts as a translation layer between ROS 2 and the React frontend. To achieve this, we are translating ROS 2 messages into JSON and back.
In the frontend, we use a window-based design where each window is its own micro program interfacing with the JSON data from the backend. This allows us to take a plugin-style approach and for the user to customize their dashboard. The goal is for users to create their own custom plugins.
There is also phone support featuring a more compact design.
Installation Guide
Requirements
- ROS 2 Iron
Install dependencies
To use the ROS 2 packages, you need to install the following packages:
Setup ROS
export ROS_DISTRO=iron
Setup FastAPI
sudo apt install python3-pip
pip install fastapi
pip install uvicorn
Other Dependencies
pip install pyyaml
Install NVM
sudo apt update
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
nvm install node
Download the Robotics UI Package
Navigate to your ROS 2 workspace src folder and download the package
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
Install the Robotics UI Backend
Navigate to your workspace folder and install the ros2_webinterface package
cd ~/ros2_ws
colcon build --packages-select ros2_webinterface && source install/setup.bash
File truncated at 100 lines see the full file