
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow ros2_tensorflow ros2_tf_core tf_classification_py tf_detection_py tf_interfaces |
Repository Summary
| Description | ROS2 nodes for computer vision tasks in Tensorflow |
| Checkout URI | https://github.com/alsora/ros2-tensorflow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-03-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | computer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_tensorflow | 0.1.0 |
| ros2_tf_core | 0.1.0 |
| tf_classification_py | 0.1.0 |
| tf_detection_py | 0.1.0 |
| tf_interfaces | 0.1.0 |
README
ros2-tensorflow
Use Tensorflow to load pretrained neural networks and perform inference through ROS2 interfaces.
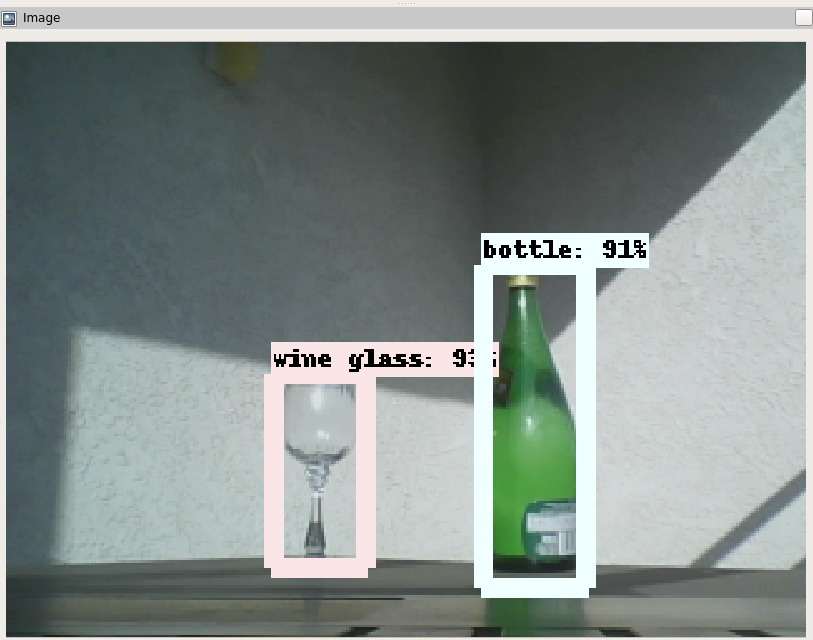 The output can be directly visualized through Rviz
The output can be directly visualized through Rviz
Requirements
In order to build the ros2-tensorflow package, the following dependencies are needed
Required dependencies:
Rosdep dependencies:
Optional dependencies:
- Tensorflow Object Detection Models for object detection tasks
- TensorFlow-Slim for object segmentation tasks
The provided Dockerfile contains an Ubuntu 18.04 environment with all the dependencies and this package already installed.
To use the Dockerfile:
$ git clone https://github.com/alsora/ros2-tensorflow.git
$ cd ros2-tensorflow/docker
$ bash build.sh
$ bash run.sh
Build
This section describes how to build the ros2-tensorflow package and the required depenencies in case you are not using the provided Dockerfile.
Get the source code and create the ROS 2 workspace
$ git clone https://github.com/alsora/ros2-tensorflow.git $HOME/ros2-tensorflow
$ mkdir -p $HOME/tf_ws/src
$ cd $HOME/tf_ws
$ ln -s $HOME/ros2-tensorflow/ros2-tensorflow src
Install required dependencies using rosdep
$ rosdep install --from-paths src --ignore-src --rosdistro foxy -y
Install the Tensorflow Object Detection Models (optional). Make sure to specify the correct Python version according to your system.
$ sudo apt-get install -y protobuf-compiler python-lxml python-tk
$ pip install --user Cython contextlib2 jupyter matplotlib Pillow
$ git clone https://github.com/tensorflow/models.git /usr/local/lib/python3.8/dist-packages/tensorflow/models
$ cd usr/local/lib/python3.8/dist-packages/tensorflow/models/research
$ protoc object_detection/protos/*.proto --python_out=.
$
$ echo 'export PYTHONPATH=$PYTHONPATH:/usr/local/lib/python3.8/dist-packages/tensorflow/models/research' >> $HOME/.bashrc
Install Tensorflow Slim (optional)
$ pip install tf_slim
Build and install the ros2-tensorflow package
$ colcon build
$ source install/local_setup.sh
Usage
The basic usage consists in creating a ROS 2 node which loads a Tensorflow model and another ROS 2 node that acts as a client and receives the result of the inference.
It is possible to specify which model a node should load. Note that if the model is specified via url, as it is by default, the first time the node is executed a network connection will be required in order to download the model.
Object Detection Task
Test the object detection server by running in separate terminals
$ ros2 run tf_detection_py server
$ ros2 run tf_detection_py client_test
Setup a real object detection pipeline using a stream of images coming from a ROS 2 camera node
$ rviz2
$ ros2 run tf_detection_py server
$ ros2 run image_tools cam2image --ros-args -p frequency:=2.0
Image Classification Task
Test the image classification server by running in separate terminals
$ ros2 run tf_classification_py server
$ ros2 run tf_classification_py client_test
Loading different models
The repository contains convenient APIs for loading Tensorflow models into the ROS 2 nodes.
Models are defined using the ModelDescriptor class, which contains all the information required for loading a model and performing inference on it.
It can either contain a path where the model can be found on the machine or an URL where the model can be downloaded the first time.
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |
|
|
ros2-tensorflow repositorycomputer-vision tensorflow image-classification image-detection ros2 ros2-tensorflow |