
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | Visualize KITTI data. Implement YOLOv5 and SGBM algorithms in ROS2 node. |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
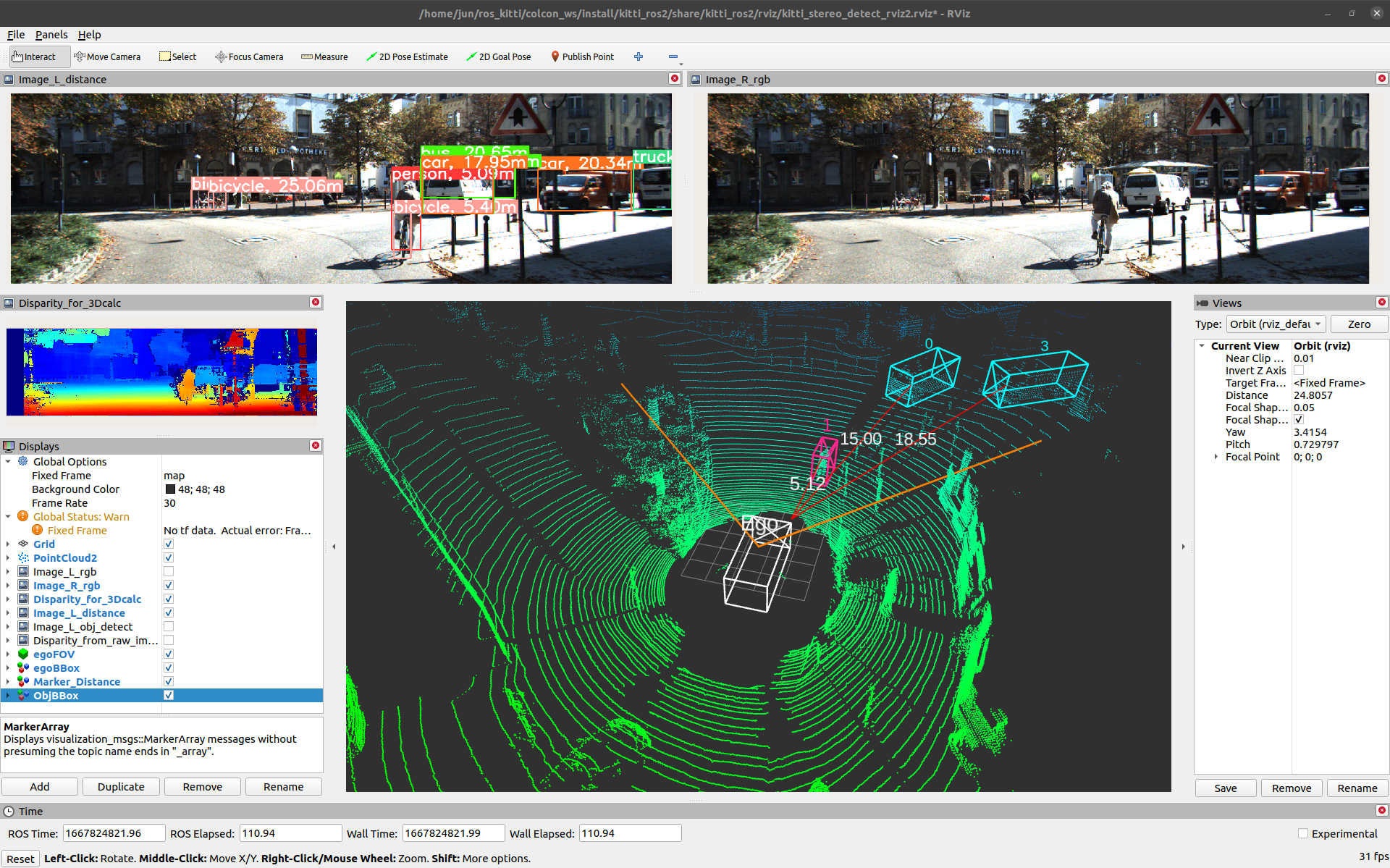
Visualization
Software pipeline
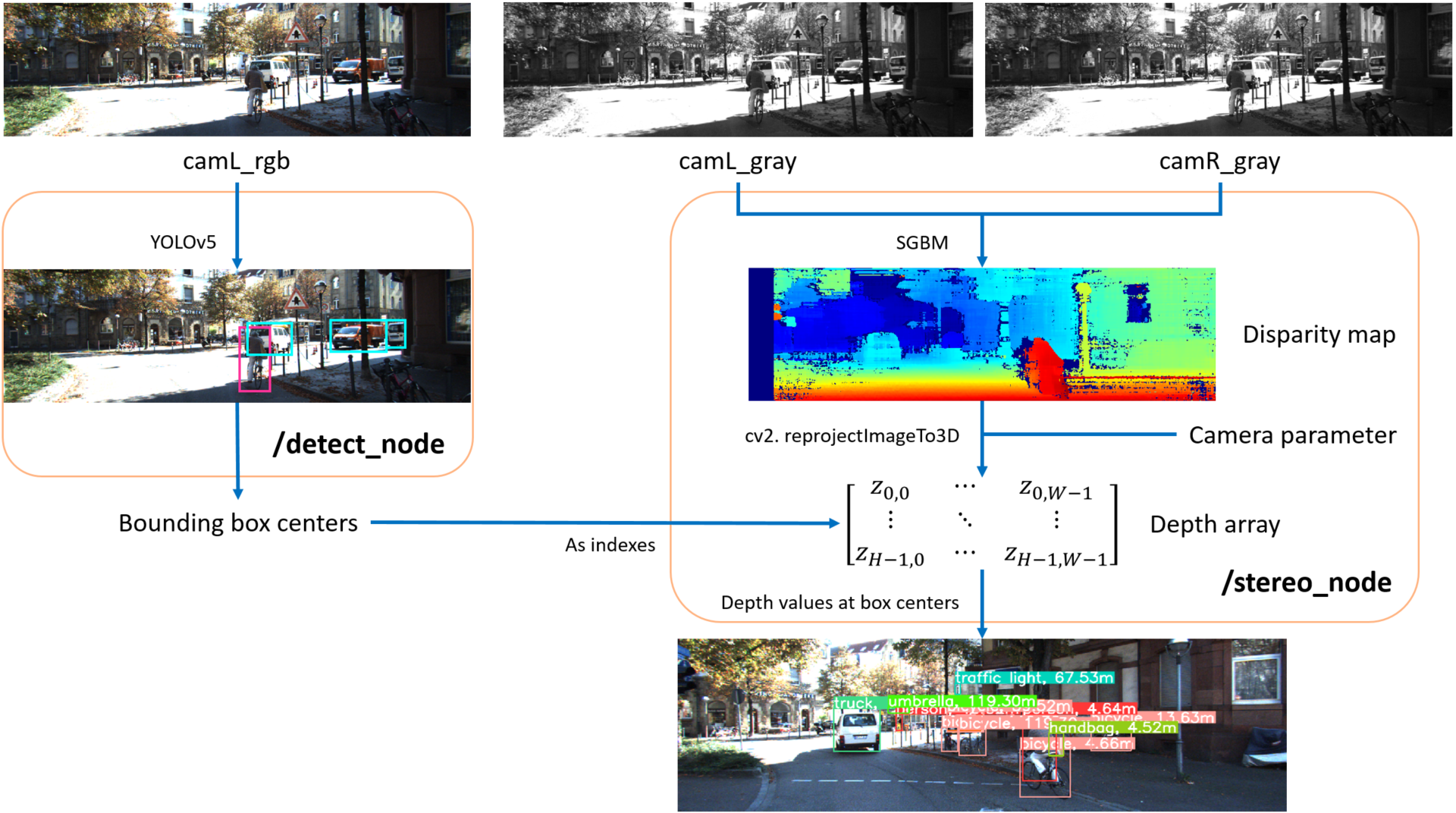
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.