
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
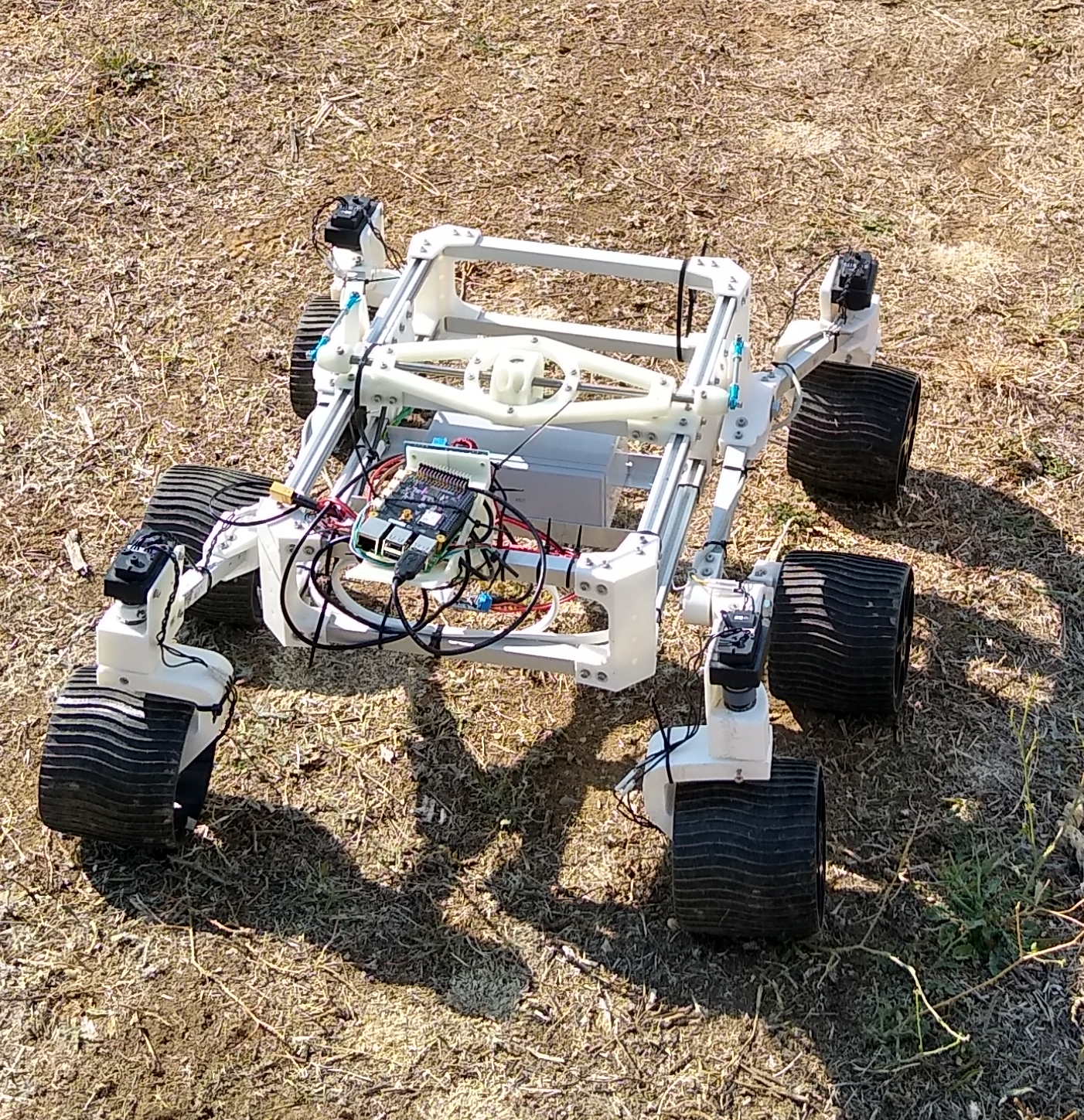
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
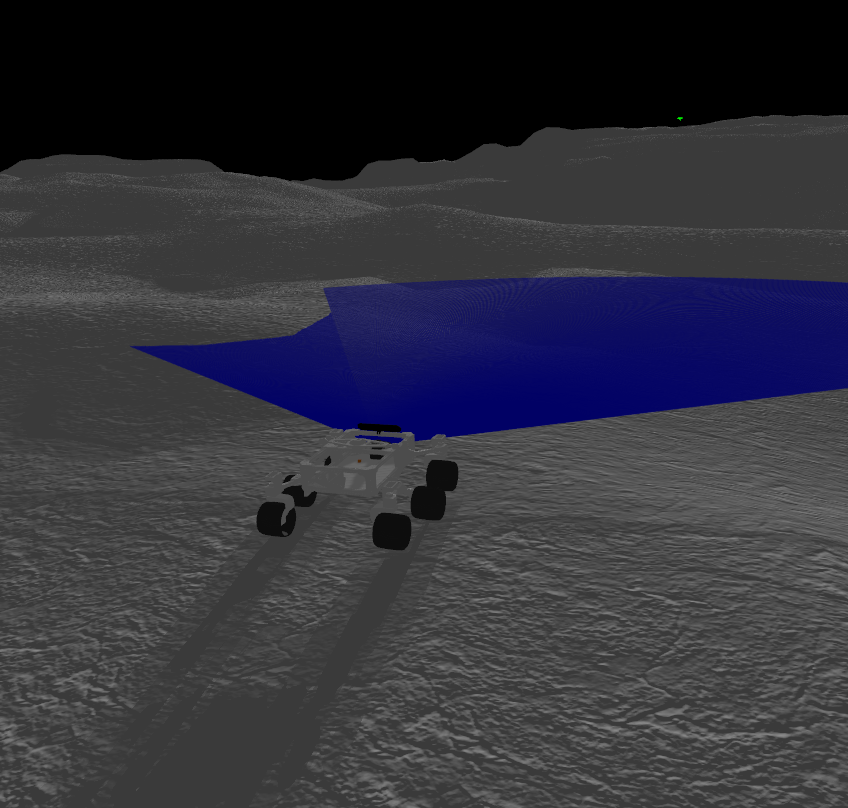
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
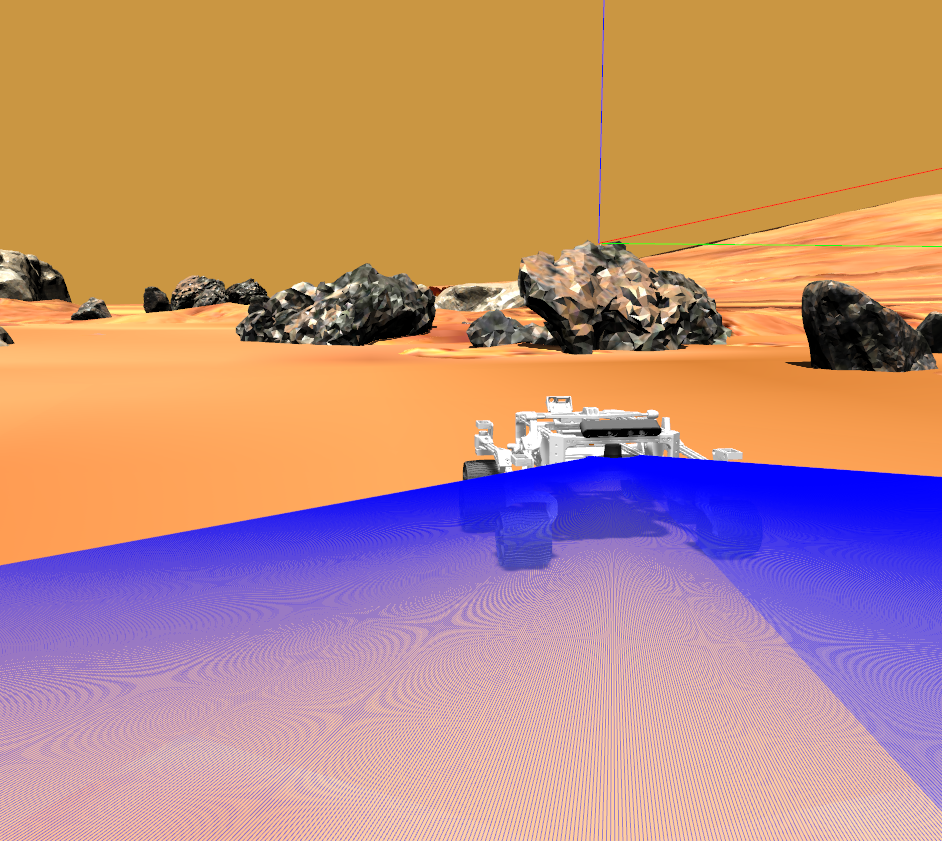
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ros2_rover repositoryrover_bringup rover_description rover_gazebo rover_localization rover_motor_controller rover_motor_controller_cpp rover_msgs rover_navigation rover_teleop |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/mgonzs13/ros2_rover.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-01-10 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rover_bringup | 1.1.1 |
| rover_description | 1.1.1 |
| rover_gazebo | 1.1.1 |
| rover_localization | 1.1.1 |
| rover_motor_controller | 1.1.1 |
| rover_motor_controller_cpp | 1.1.1 |
| rover_msgs | 1.1.1 |
| rover_navigation | 1.1.1 |
| rover_teleop | 1.1.1 |
README
ros2_rover
This is a ROS 2 (Humble) version of the Sawppy the Rover. A C++ version and a Python version of the lx16a controller are included. Besides, a PS3 joy controller and a hokuyo laser can be used.
Table of Contents
Installation
cd ~/ros2_ws/src
git clone https://github.com/mgonzs13/ros2_rover
cd ~/ros2_ws
rosdep install --from-paths src -r -y
colcon build
Docker
You can create a docker image to test this repo. Use the following common inside the directory of ros2_rover.
docker build -t rover .
After the image is created, run a docker container with the following command.
docker run -it --rm rover
Usage
ros2 launch rover_bringup rover.launch.py
Linux Service
A Linux service can be created to control the execution and launch everything at boot time. To create the rover service, the following commands are used:
cd ~/ros2_ws/src/ros2_rover/rover_service
sudo ./install.sh
Check rover service:
sudo service rover status
Gazebo Simulation
Moon
ros2 launch rover_gazebo moon.launch.py
Mars
ros2 launch rover_gazebo mars.launch.py
Forest
ros2 launch rover_gazebo forest.launch.py
File truncated at 100 lines see the full file