
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
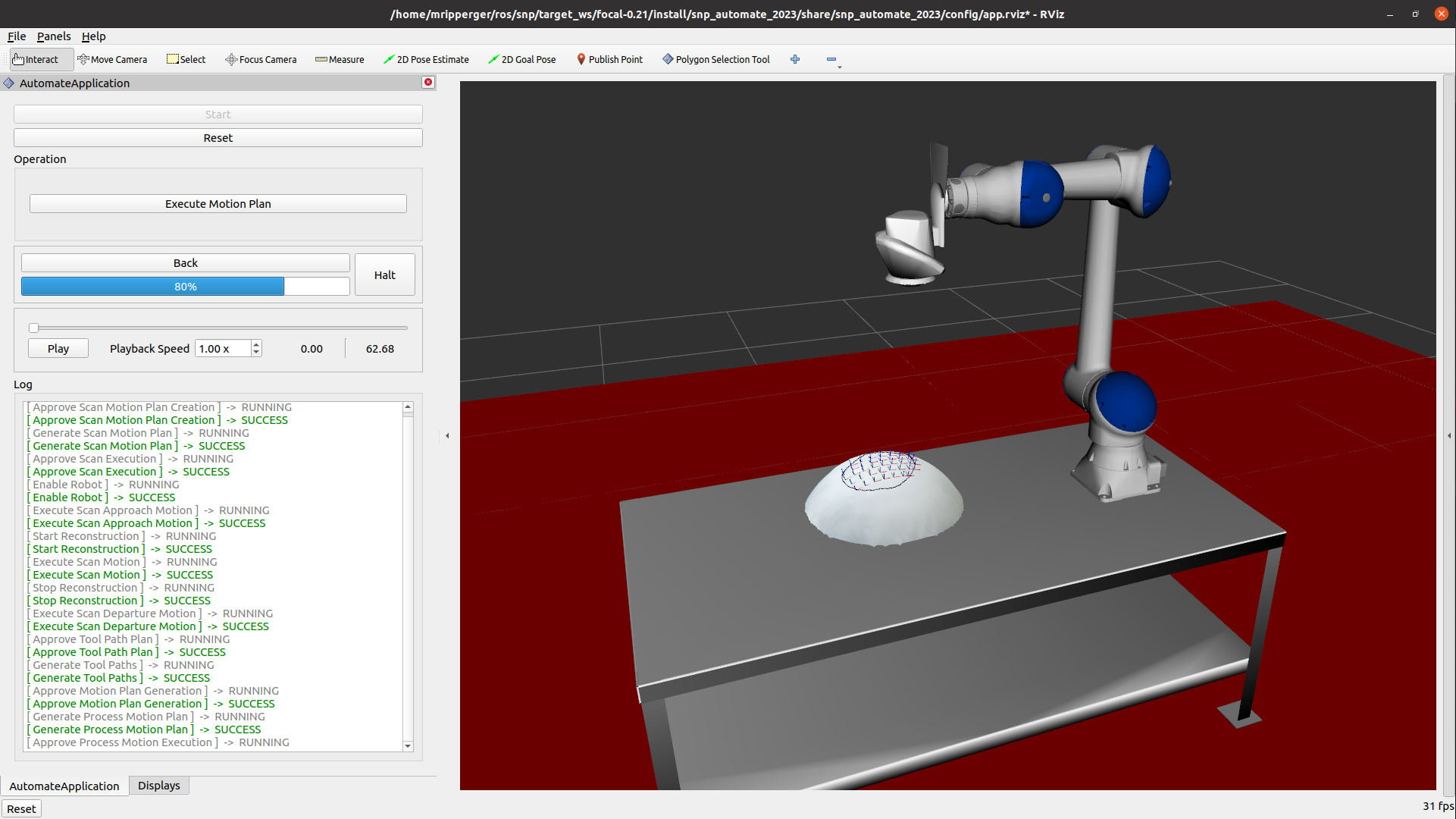
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.
CONTRIBUTING
|
|
scan_n_plan_workshop repositorysnp_application snp_motion_execution snp_motion_planning snp_msgs snp_scanning snp_tpp |
ROS Distro
|
Repository Summary
| Description | Provides a ROS2-based software framework for performing perception-based surface processing applications. |
| Checkout URI | https://github.com/ros-industrial-consortium/scan_n_plan_workshop.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-09 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| snp_application | 7.0.0 |
| snp_motion_execution | 7.0.0 |
| snp_motion_planning | 7.0.0 |
| snp_msgs | 7.0.0 |
| snp_scanning | 7.0.0 |
| snp_tpp | 7.0.0 |
README
Scan-N-Plan Workshop
Description
This repository provides a ROS2-based software framework for performing perception-based surface processing applications.
Documentation
See the documentation for more information on the capabilities and usage of this repository.