
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
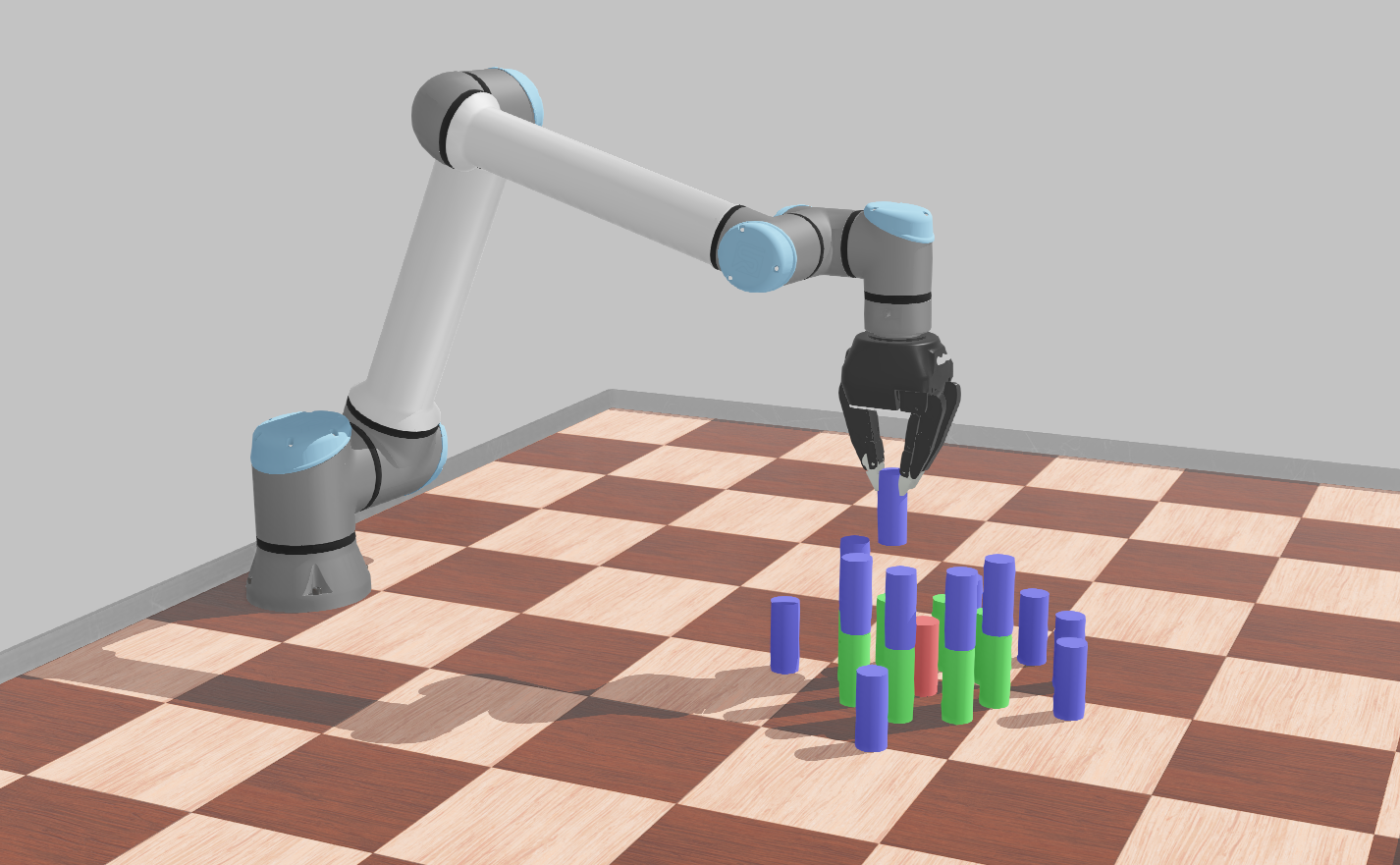
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
simenvbenchmark repositoryrobotiq robotiq_3f_gripper_articulated_gazebo robotiq_3f_gripper_visualization universal_robots ur_description ur_gazebo ur_kinematics ur_robotiq_connector |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/zal/simenvbenchmark.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2021-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| robotiq | 1.0.0 |
| robotiq_3f_gripper_articulated_gazebo | 1.0.0 |
| robotiq_3f_gripper_visualization | 1.0.0 |
| universal_robots | 1.2.5 |
| ur_description | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_robotiq_connector | 0.0.0 |
README
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
![]()
![]()
![]()
This repository provides the code used in our paper Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning, also available on arXiv. The scope of this benchmark is to compare Gazebo, MuJoCo, PyBullet, and Webots.
Benchmark scenarios
Two benchmark scenarios were developed. With the option sim_option one of the twi scenarios can be choosen. For scenario 1 it is "RobotSim", for scenario 2 it is "nnnSim". All units are, unless otherwise noted, in SI units.
Scenario 1 - Robot Scenario
Workspace
The workspace should delimit the work area, but also offer a defined surface for all contacts with the floor.
All object forming the workspace are colored in #4d4d4d.
| Object | Position | Size |
|---|---|---|
| Main floor | [0.0, 0.75, 0.01] |
[2.6, 1.8, 0.02] |
| Wall 1 | [1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 2 | [-1.31, 0.75, 0.03] |
[0.02, 1.8, 0.06] |
| Wall 3 | [0.0, -0.16, 0.03] |
[2.64, 0.02, 0.06] |
| Wall 4 | [0.0, 1.66, 0.03] |
[2.64, 0.02, 0.06] |
Robot
In this scenario, we are using an UR10e by Universal Robots:
| Object | Position |
|---|---|
| UR10e | [0.0, 0.0, 0.02] |
The initial position of the joints are defined as:
| Joint | Name | Position |
|---|---|---|
| joint_0 | shoulder_pan_joint | 1.411872641811951 |
| joint_1 | shoulder_lift_joint | -0.8420041879132294 |
| joint_2 | elbow_joint | 1.0565325644929087 |
| joint_3 | wrist_1_joint | -1.7859626190435058 |
| joint_4 | wrist_2_joint | -1.5704882948679586 |
| joint_5 | wrist_3_joint | 1.4109012658608595 |
Further information can be found at ros-industrial/universal_robot and Universal Robots
Gripper
Coupled to the UR10e is the 3-Finger Adaptive Robot Gripper by Robotiq.
Cylinders
All cylinders are the same size, i. e. a height of 0.1 m and a diameter of 0.04 m.
They are arranged in two coaxial circles with on single cylinder in the middle.
The naming is given by the circle the belong to (1: single middle cylinder, 2: inner cirlce, 3: outer circle) and their respective position along the circle.
The colors are defined as #b34d4d, #4db34d, #4d4db3, for the single cylinder, the inner circle, and the outer circle, respectivley.
| Cylinder | Position |
|---|---|
| cylinder_1 | [0.0, 1.0, 0.07] |
| cylinder_2_1 | [0.0, 1.1, 0.07] |
| cylinder_2_2 | [0.071, 1.071, 0.07] |
| cylinder_2_3 | [0.1, 1.0, 0.07] |
| cylinder_2_4 | [0.071, 0.929, 0.07] |
| cylinder_2_5 | [0.0, 0.9, 0.07] |
| cylinder_2_6 | [-0.071, 0.929, 0.07] |
| cylinder_2_7 | [-0.1, 1.0, 0.07] |
| cylinder_2_8 | [-0.071, 1.071, 0.07] |
| cylinder_3_1 | [0.0, 1.2, 0.07] |
| cylinder_3_2 | [0.1, 1.173, 0.07] |
| cylinder_3_3 | [0.171, 1.104, 0.07] |
| cylinder_3_4 | [0.2, 1.0, 0.07] |
| cylinder_3_5 | [0.171, 0.896, 0.07] |
| cylinder_3_6 | [0.1, 0.827, 0.07] |
| cylinder_3_7 | [0.0, 0.8, 0.07] |
| cylinder_3_8 | [-0.1, 0.827, 0.07] |
File truncated at 100 lines see the full file