No version for distro humble showing github. Known supported distros are highlighted in the buttons above.

Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
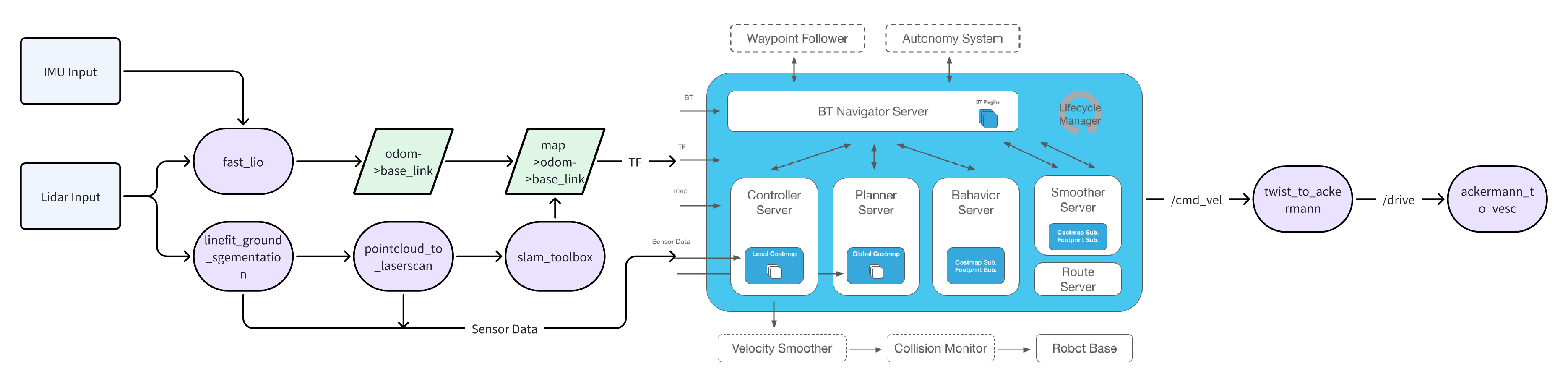
二. 框架图
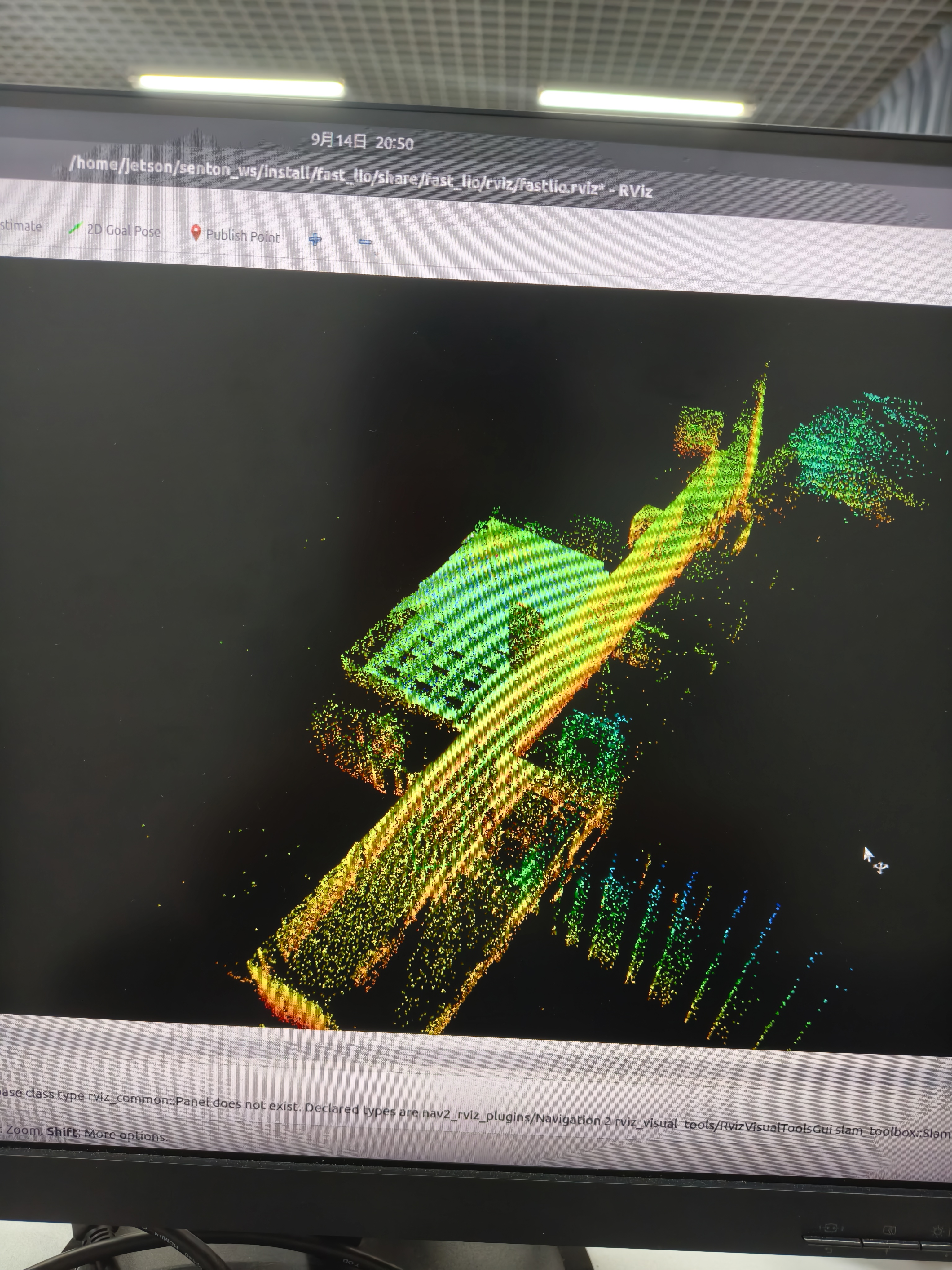
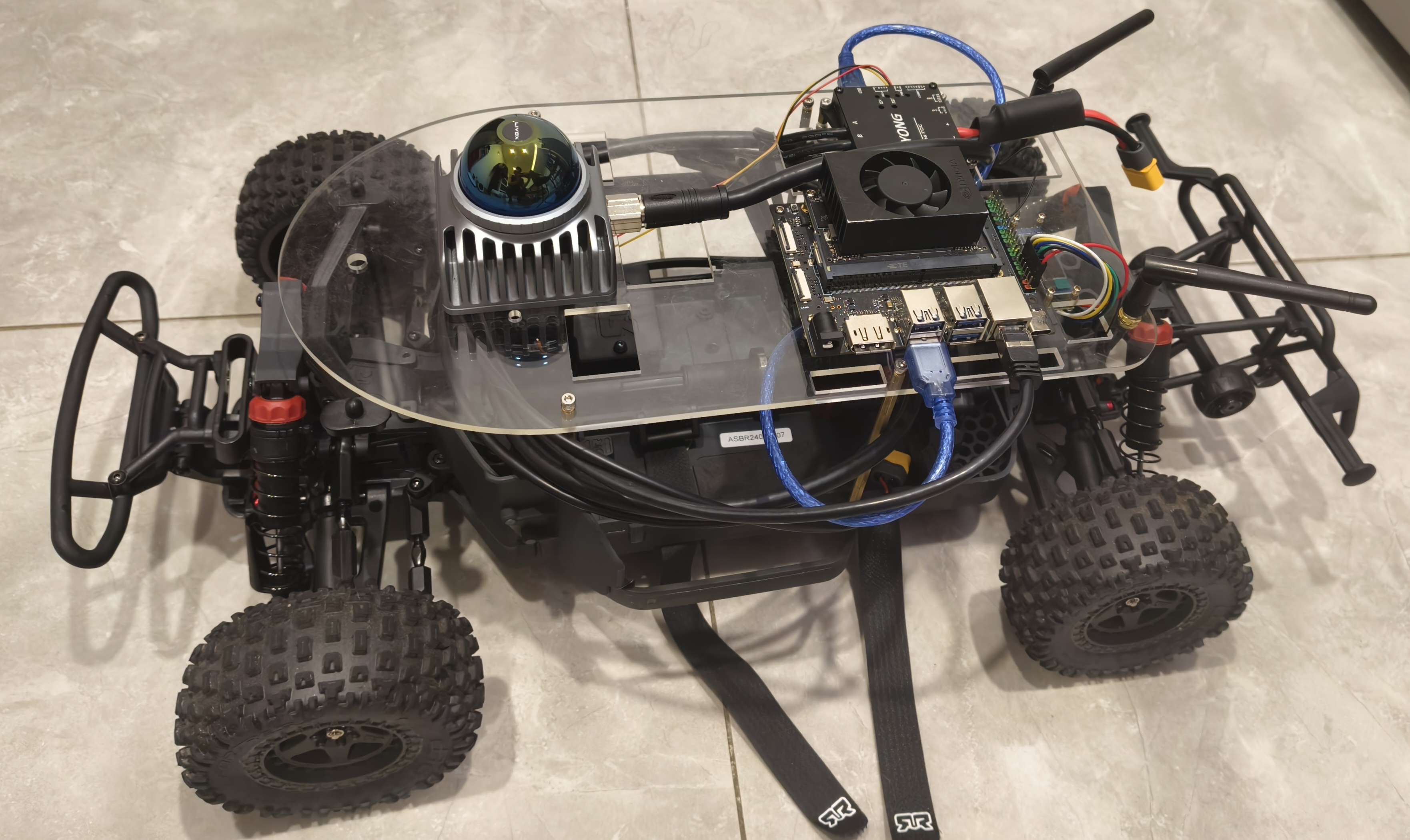
三. 测试图
CONTRIBUTING
No version for distro jazzy showing github. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图
CONTRIBUTING
No version for distro kilted showing github. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图
CONTRIBUTING
No version for distro rolling showing github. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图
CONTRIBUTING
No version for distro galactic showing github. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图
CONTRIBUTING
No version for distro iron showing github. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图
CONTRIBUTING
No version for distro melodic showing github. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图
CONTRIBUTING
No version for distro noetic showing github. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/jialin3/slash_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ackermann_mux | 0.0.1 |
| f1tenth_stack | 0.0.1 |
| joy_teleop | 1.2.1 |
| key_teleop | 1.2.1 |
| mouse_teleop | 1.2.1 |
| teleop_tools | 1.2.1 |
| teleop_tools_msgs | 1.2.1 |
| vesc | 1.1.0 |
| vesc_ackermann | 1.1.0 |
| vesc_driver | 1.1.0 |
| vesc_msgs | 1.1.0 |
| livox_ros_driver2 | 1.0.0 |
| fast_lio | 0.0.0 |
| costmap_converter | 0.1.2 |
| costmap_converter_msgs | 0.1.2 |
| slash_nav2 | 0.0.0 |
| teb_local_planner | 0.8.4 |
| teb_msgs | 0.0.1 |
| linefit_ground_segmentation | 0.0.1 |
| linefit_ground_segmentation_ros | 0.0.1 |
| pointcloud_to_laserscan | 2.0.1 |
| twist_to_ackermann | 0.0.0 |
README
一. 环境配置
ARM64 (jetson orin nx) ubuntu20.04 ROS2 foxy
- 克隆仓库
git clone --recursive https://github.com/Jialin3/slash_ws.git
- 安装 Livox SDK2
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
ps:之前用过4g版本的jetson orin nano在多线程编译make -j时会直接卡死
- 安装依赖
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
ps:大概率rosdep连接超时,手动用二进制apt安装需要的依赖
- 编译
colcon build --symlink-install
ps:--symlink-instal方便调试参数文件不用二次编译,
--packages-select编译指定包
二. 框架图
三. 测试图