
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>


 </div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

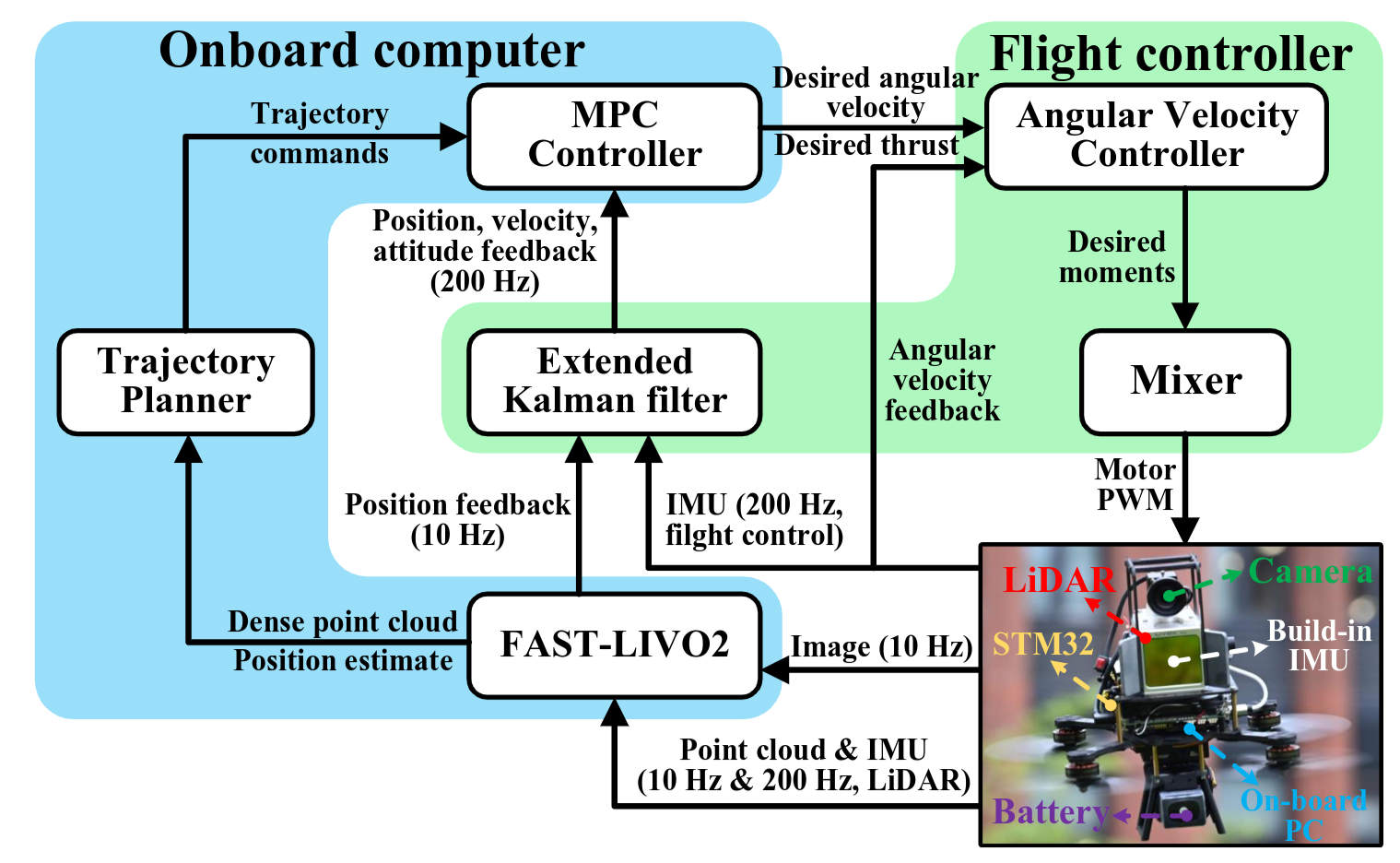
### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
 # 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)
CONTRIBUTING
|
|
super repositoryquadrotor_msgs marsim_render perfect_drone_sim mission_planner rog_map super_planner |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/hku-mars/super.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-06-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quadrotor_msgs | 0.0.0 |
| marsim_render | 0.0.0 |
| perfect_drone_sim | 0.0.0 |
| mission_planner | 0.0.0 |
| rog_map | 0.0.0 |
| super_planner | 0.0.0 |
README
SUPER: Safety-assured High-speed Navigation for MAVs
Science Robotics' 25Yunfan REN, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang
![]()
</h5>
</p>
</div>
# Updates
* **Mar. 09, 2025** - The hardware components of SUPER have been released at [SUPER-Hardware](https://github.com/hku-mars/SUPER-Hardware) 🦾
* **Jan. 29, 2025** - The preview version of SUPER's planning module, supporting both ROS1 and ROS2, is now available! Try it out, and we welcome any issues or contributions.
* **Jan. 29, 2025** - The paper of SUPER is now featured on the official website of [*Science Robotics*](https://www.science.org/doi/10.1126/scirobotics.ado6187).
* **Dec. 12, 2024** - 🎉 Our paper has been accepted by *Science Robotics*!
Our paper is also aviliable at [here](misc/scirobotics.ado6187.pdf). If our repository supports your academic projects, please cite our work. Thank you!
```tex
@article{ren2025safety,
title={Safety-assured high-speed navigation for MAVs},
author={Ren, Yunfan and Zhu, Fangcheng and Lu, Guozheng and Cai, Yixi and Yin, Longji and Kong, Fanze and Lin, Jiarong and Chen, Nan and Zhang, Fu},
journal={Science Robotics},
volume={10},
number={98},
pages={eado6187},
year={2025},
publisher={American Association for the Advancement of Science}
}
@article{lu2025autonomous,
title={Autonomous Tail-Sitter Flights in Unknown Environments},
author={Lu, Guozheng and Ren, Yunfan and Zhu, Fangcheng and Li, Haotian and Xue, Ruize and Cai, Yixi and Lyu, Ximin and Zhang, Fu},
journal={IEEE Transactions on Robotics},
year={2025},
publisher={IEEE}
}
@inproceedings{ren2024rog,
title={Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning},
author={Ren, Yunfan and Cai, Yixi and Zhu, Fangcheng and Liang, Siqi and Zhang, Fu},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={8119--8125},
year={2024},
organization={IEEE}
}
```
# 1 Highlights
## 1.1 Autonomous Navigation in Challenging Environments
(Click for video demo)
[](https://youtu.be/GPHuzG0ANmI?si=W83mDMxqfgWReWPF)
## 1.2 Applications: Object Tracking & Autonomous Exploration
SUPER has been successfully deployed in various applications, including large-scale autonomous exploration in an ongoing project by [@jackykongfz](https://github.com/jackykongfz) and [@ZbyLGsc](https://github.com/ZbyLGsc) from [STAR Lab](sysu-star.com), among others, as well as object tracking under both day and night conditions.

> ⬆️ This segment is from an unpublished work by Kong [[@jackykongfz](https://github.com/jackykongfz) ] et al., conducted in collaboration with [STAR Lab](sysu-star.com), using SUPER.

## 1.3 Supported Projects
### 1.3.1 Autonomous Tail-Sitter (TRO '25)
Building on SUPER, a similar planning system has been successfully validated in [Autonomous Navigation for Tail-Sitter UAVs](https://github.com/hku-mars/EFOPT) by [@genegzl](https://github.com/genegzl) et al.

### 1.3.2 FAST-LIVO2 (TRO '24)
SUPER serves as the flight platform and navigation system in the video demonstration of [FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry](https://github.com/hku-mars/FAST-LIVO2) by [@xuankuzcr](https://github.com/xuankuzcr) et al.
# 2 Quick Start
## 2.1 Installation
Install dependencies
File truncated at 100 lines [see the full file](https://github.com/hku-mars/super/tree/master/README.md)