
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
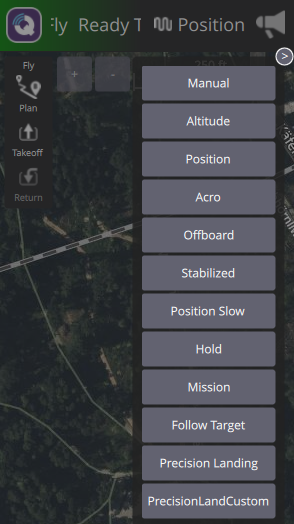
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ark-electronics/tracktor-beam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-10-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco_tracker | 0.0.1 |
| precision_land | 0.0.1 |
| precision_land_viz | 0.0.1 |
README
Video Walkthrough
Prerequisites
- Ubuntu 22.04
- ROS2 Humble
- Gazebo Harmonic
- Micro XRCE-DDS Agent
- QGroundControl Daily Build
- OpenCV 4.10.0
Setup the Workspace
Make sure you source ROS2 Humble in the terminal you are using. You can add this line to your ~/.bashrc if you want it sourced every time you open a new terminal.
source /opt/ros/humble/setup.bash
Navigate to the directory you would like to place the worskpace and then run the following
git clone --recurse-submodules https://github.com/ARK-Electronics/tracktor-beam.git
Then navigate into the workspace:
cd tracktor-beam
Install OpenCV from source
./install_opencv.sh
Set the GZ_VERSION environment variable
export GZ_VERSION=harmonic
Build the workspace
colcon build
After this runs, we do not need to build the whole workspace again, you can just build the individual packages you have modified
colcon build --packages-select precision_land
Source the workspace
source install/setup.bash
Run the example
Run the simulation environment
This workspace is tested against a specific version of PX4. Please use PX4 commit 86f2fdfd7de7f5e5d29ab61f60d81e892a557376.
Launch PX4 Simulation
make px4_sitl gz_x500_mono_cam_down_aruco
Launch MicroXRCEAgent
MicroXRCEAgent udp4 -p 8888
Launch all of the nodes
ros2 launch precision_land precision_landing_system.launch.py
View the video (/image_proc is the annoted image)
ros2 run rqt_image_view rqt_image_view
Once the nodes are running the Precision Land mode is going to show up in QGC
ARK Electronics
Checkout our online store Follow us on LinkedIn Follow us on X
Questions
Message Patrik Dominik Pordi on the ARK Electronics / Dronecode Foundation Discord for questions or email me at patrik@arkelectron.com
Additional resources
File truncated at 100 lines see the full file