
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
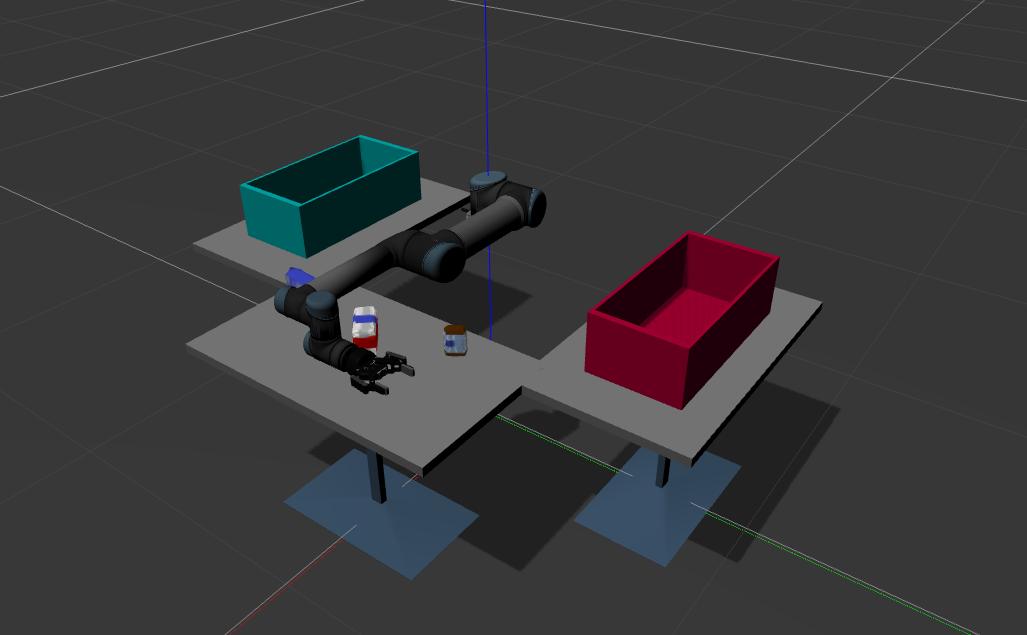
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
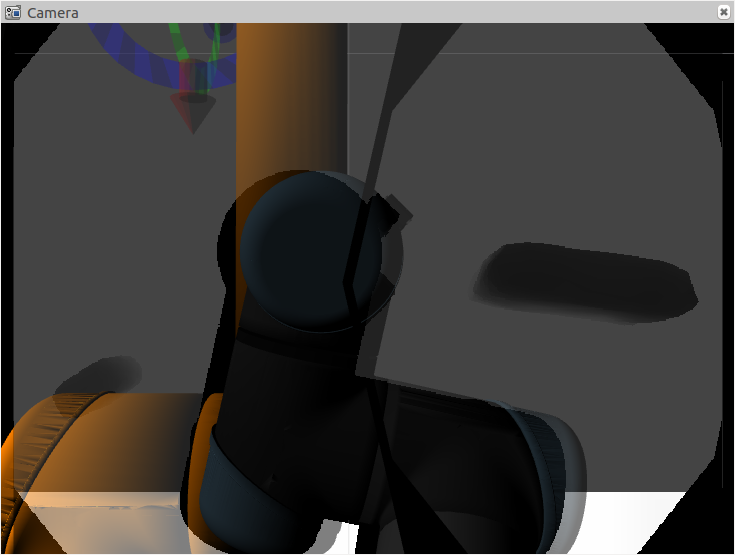
Camera Images
RGB image

Depth image
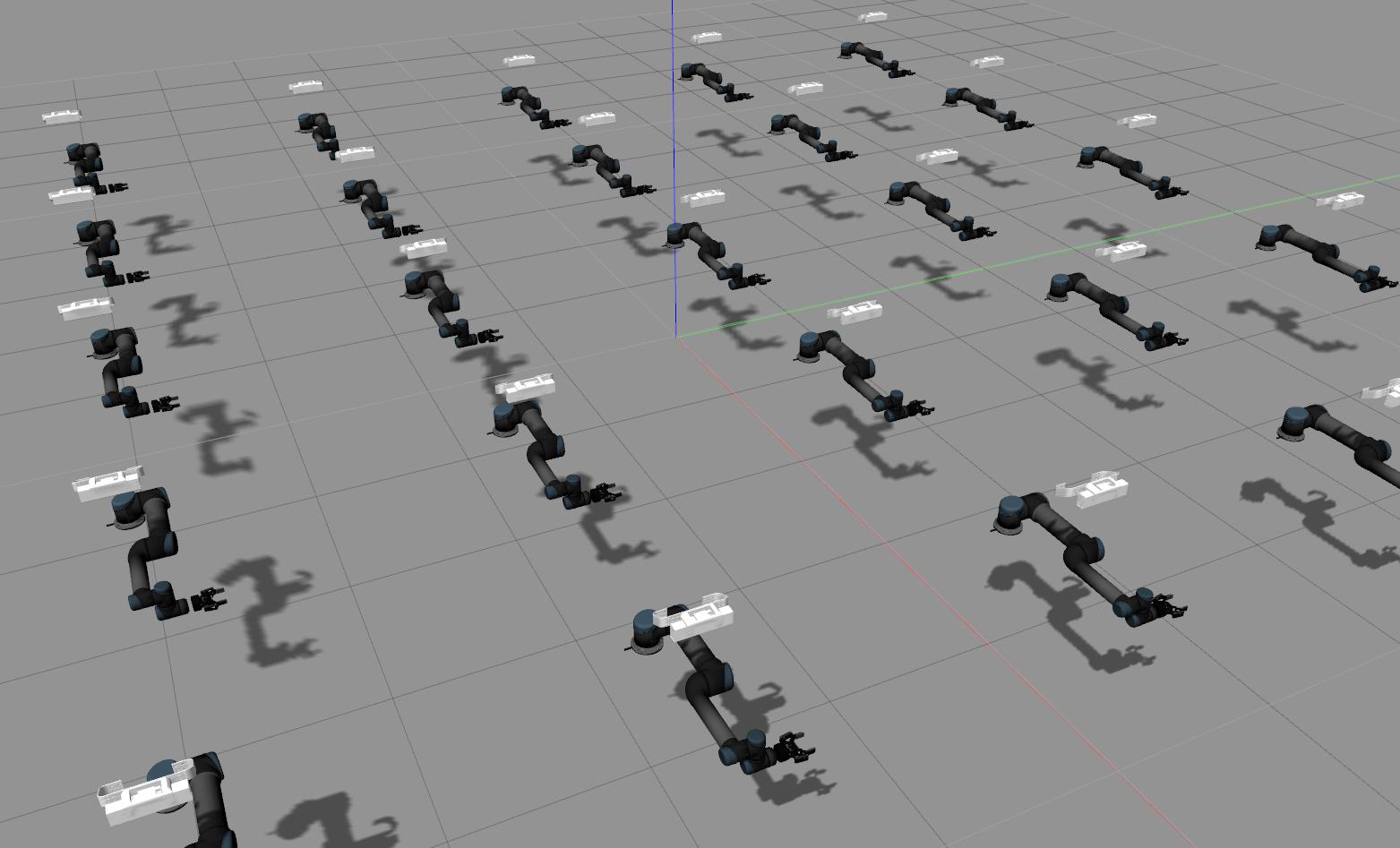
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
Camera Images
RGB image
Depth image
Multiple Arms