
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).


Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
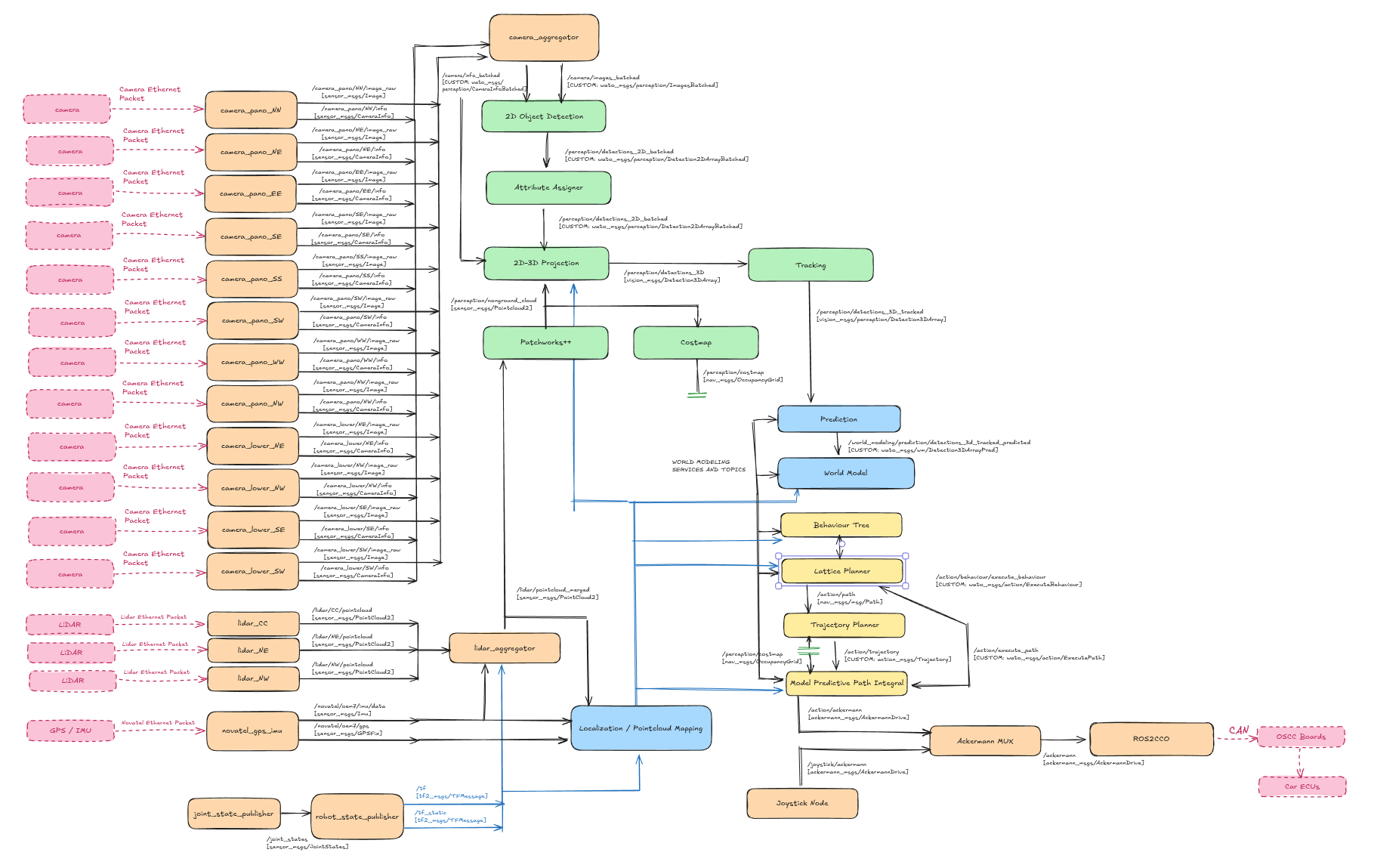
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/watonomous/wato_monorepo.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
WATonomous Monorepo (for EVE)
Dockerized monorepo for the WATonomous autonomous vehicle project (dubbed EVE).
Prerequisite Installation
These steps are to setup the monorepo to work on your own PC. We utilize docker to enable ease of reproducibility and deployability.
Why docker? It’s so that you don’t need to download any coding libraries on your bare metal pc, saving headache :3
- Our monorepo infrastructure supports Linux Ubuntu >= 22.04, Windows (WSL/WSL2), and MacOS. Though, aspects of this repo might require specific hardware like NVidia GPUs.
- Once inside Linux, Download Docker Engine using the
aptrepository. If you are using WSL, install docker outside of WSL, it will automatically setup docker within WSL for you. - You’re all set! Information on running the monorepo with our infrastructure is given here
Available Modules
Infrastructure Starts the foxglove bridge and data streamer for rosbags.
Interfacing Launches packages directly connecting to hardware. This includes the sensors of the car and the car itself. see docs
Perception Launches packages for perception. see docs
World Modeling Launches packages for world modeling. see docs
Action Launches packages for action. see docs
Simulation Launches packages CARLA simulator. see docs
System Architecture
Contribute
Information on contributing to the monorepo is given in DEVELOPING.md