
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | Sample showing how to use YOLOv5 with Nvidia Isaac ROS DNN Inference |
| Checkout URI | https://github.com/nvidia-ai-iot/yolov5-with-isaac-ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-12-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| yolov5_isaac_ros | 0.0.0 |
README
YOLOv5 object detection with Isaac ROS
This is a sample showing how to integrate YOLOv5 with Nvidia Isaac ROS DNN Inference.
Requirements
Tested on Jetson Orin running JetPack 5.0.2 and Intel RealSense D435 Webcam.
Development Environment Setup
Use the Isaac ROS Dev Docker for development. This provides an environment with all dependencies installed to run Isaac ROS packages.
Usage
Refer to the license terms for the YOLOv5 project before using this software and ensure you are using YOLOv5 under license terms compatible with your project requirements.
Model preparation
- Download the YOLOv5 PyTorch model - yolov5s.pt from the Ultralytics YOLOv5 project.
- Export to ONNX following steps here and visualize the ONNX model using Netron. Note
inputandoutputnames - these will be used to run the node. For instance,imagesfor input andoutput0for output. Also note input dimensions, for instance,(1x3x640x640).
Object Detection pipeline Setup
- Following the development environment setup above, you should have a ROS2 workspace named
workspaces/isaac_ros-dev. Clone this repository and its dependencies underworkspaces/isaac_ros-dev/src:
cd ~/workspaces/isaac_ros-dev/src
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_nitros.git
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_dnn_inference.git
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_image_pipeline
git clone https://github.com/NVIDIA-AI-IOT/YOLOv5-with-Isaac-ROS.git
- Download requirements.txt from the Ultralytics YOLOv5 project to
workspaces/isaac_ros-dev/src. - Copy your ONNX model (say,
yolov5s.onnx) from above toworkspaces/isaac_ros-dev/src. - Follow Isaac ROS Realsense Setup to setup the camera.
- Launch the Docker container using the run_dev.sh script:
cd ~/workspaces/isaac_ros-dev/src/isaac_ros_common
./scripts/run_dev.sh
- Inside the container, run the following:
pip install -r src/requirements.txt
-
Install Torchvision: This project runs on a device with an Nvidia GPU. The Isaac ROS Dev container uses the Nvidia-built PyTorch version with CUDA-acceleration. Ensure that you install a compatible Torchvision version from source for CUDA-acceleration. Specify the compatible version in place of
$torchvision_tagbelow:
git clone https://github.com/pytorch/vision.git
cd vision
git checkout $torchvision_tag
pip install -v .
- Download the utils folder from the Ultralytics YOLOv5 project and put it in the
yolov5_isaac_rosfolder of this repository. Finally, your file structure should look like this (all files not shown here):
.
+- workspaces
+- isaac_ros-dev
+- src
+- requirements.txt
+- yolov5s.onnx
+- isaac_ros_common
+- YOLOv5-with-Isaac-ROS
+- README
+- launch
+- images
+- yolov5_isaac_ros
+- utils
+- Yolov5Decoder.py
+- Yolov5DecoderUtils.py
Refer to the license terms for the YOLOv5 project before using this software and ensure you are using YOLOv5 under license terms compatible with your project requirements.
- Make the following changes to
utils/general.py,utils/torch_utils.pyandutils/metrics.pyafter downloading utils from the Ultralytics YOLOv5 project:- In the import statements, add
yolov5_isaac_rosbeforeutils. For instance - changefrom utils.metrics import box_ioutofrom yolov5_isaac_ros.utils.metrics import box_iou
- In the import statements, add
Running the pipeline with TensorRT inference node
- Inside the container, build and source the workspace:
cd /workspaces/isaac_ros-dev
colcon build --symlink-install
source install/setup.bash
- Launch the RealSense camera node as per step 7 here:
ros2 launch realsense2_camera rs_launch.py - Verify that images are being published on
/camera/color/image_raw. You could use RQt/Foxglove for this or use this command in another terminal inside the container:ros2 topic echo /camera/color/image_raw - In another terminal inside the container, run the
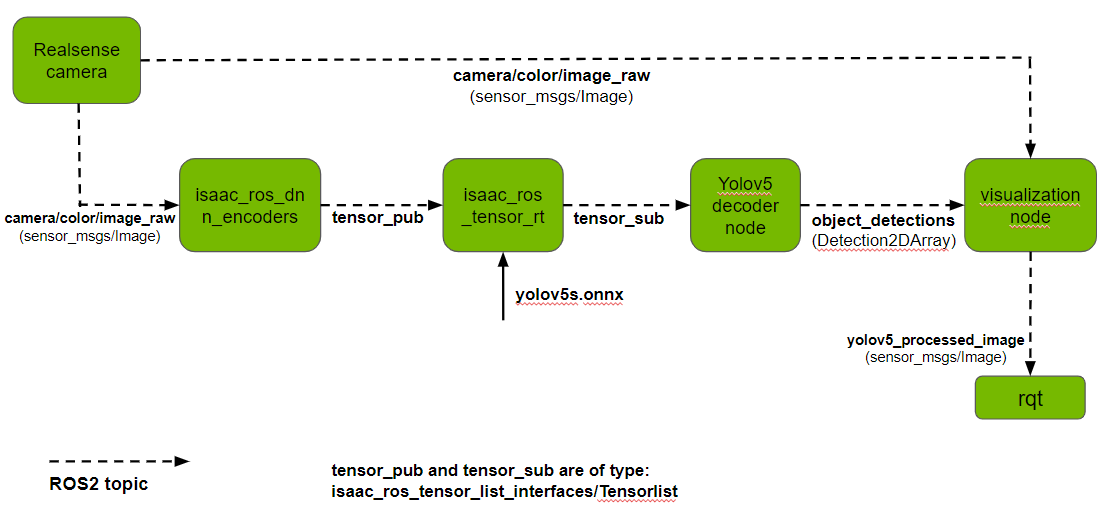
isaac_ros_yolov5_tensor_rtlaunch file. This launches the DNN image encoder node, TensorRT inference node and YOLOv5 decoder node. It also launches a visualization script that shows results on RQt. Use the names noted above in Model preparation asinput_binding_namesandoutput_binding_names(for example,imagesforinput_binding_namesandoutput0foroutput_binding_names). Similarly, use the input dimensions noted above asnetwork_image_widthandnetwork_image_height:
ros2 launch yolov5_isaac_ros isaac_ros_yolov5_tensor_rt.launch.py model_file_path:=/workspaces/isaac_ros-dev/src/yolov5s.onnx engine_file_path:=/workspaces/isaac_ros-dev/src/yolov5s.plan input_binding_names:=['images'] output_binding_names:=['output0'] network_image_width:=640 network_image_height:=640
- For subsequent runs, use the following command as the engine file
yolov5s.planis generated and saved inworkspaces/isaac_ros-dev/src/after running the command above:
```
File truncated at 100 lines see the full file
CONTRIBUTING
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.