
|
handle_detector package from handle_detector repohandle_detector |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.3.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/atenpas/handle_detector.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2017-01-31 |
| Dev Status | MAINTAINED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Andreas ten Pas
Authors
Handle Detector
Author: Andreas ten Pas (atp@ccs.neu.edu)
Version: 1.0.0
Wiki: http://wiki.ros.org/handle_detector
Author’s Website: http://www.ccs.neu.edu/home/atp/
OVERVIEW
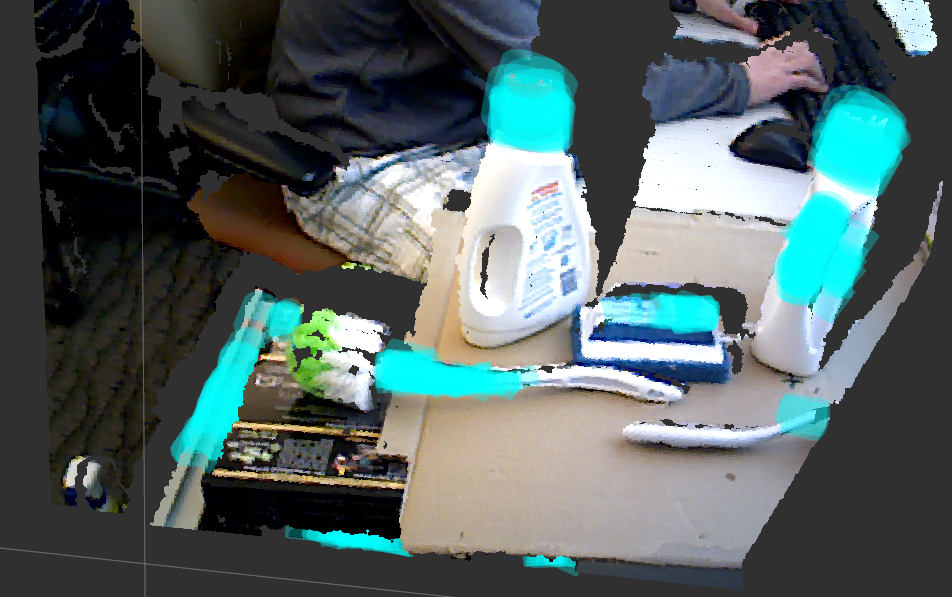
This package takes a point cloud as input and produces a list of handels / enveloping grasp affordances as output.
Input: point cloud
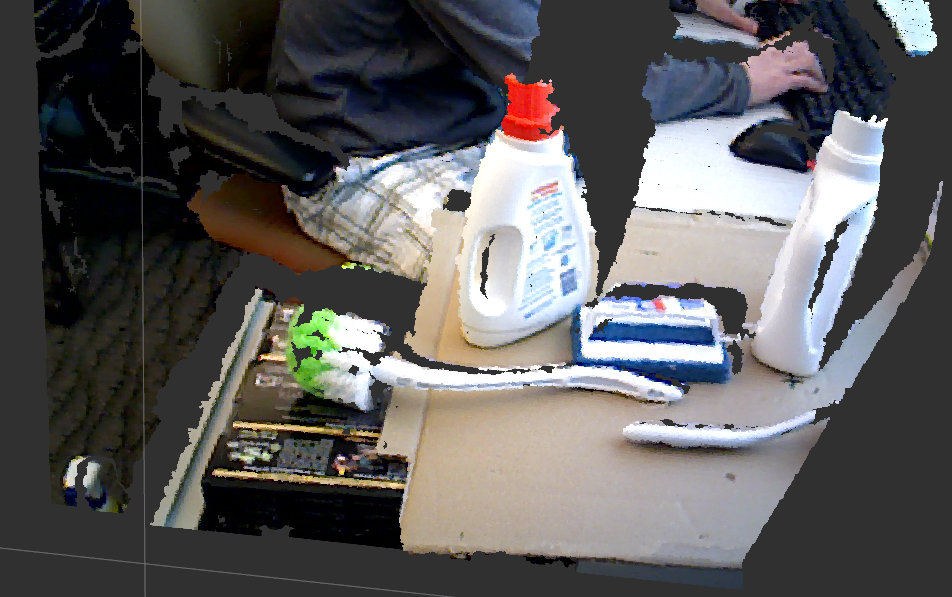
Output: handles / enveloping grasp affordances
REQUIREMENTS
- ROS Hydro (http://wiki.ros.org/hydro)
- Lapack (install in Ubuntu using: sudo apt-get install liblapack-dev)
- Openni_launch (http://wiki.ros.org/openni_launch; install in Ubuntu using: sudo apt-get install ros-hydro-openni-launch)
INSTRUCTIONS
Please look at http://wiki.ros.org/handle_detector for detailed instructions.
Changelog for package handle_detector
1.3.1 (2015-06-16)
- removed pcl ros includes from importance sampling
- update CHANGELOG
- update CHANGELOG
- Contributors: atenpas
1.3.0 (2015-06-10)
- remove pcl_ros dependency
- Contributors: atenpas
1.2.0 (2015-05-16)
- update launch files with relative paths
- Contributors: atenpas
1.1.1 (2015-05-14)
- updated CMakeList for indigo
- speeds up shell search (thanks to Sachin Patil)
- added workspace filter with transform; changed BCI numbering
- changed to std::size_t where std::vectors are used in for loops
- Contributors: atenpas
1.1.0 (2014-07-24)
- updated readme
- updated CMakeLists and package.xml
- cleaned up folders; added documentation
- added importance sampling (reduces number of samples)
- Contributors: atenpas
1.0.7 (2014-04-09)
- removed LIBRARIES from catkin_package(...) call in CMakeLists.txt
- changed naming of libraries and executable in CMakeLists.txt so that it contains the project name
- added libs to install targets in CMakeLists
- Contributors: atenpas
1.0.6 (2014-03-25)
- Merge pull request #1 from cottsay/master Fix Fedora build errors
- Move default affordances values into source file I really couldn't tell you exactly why this was failing builds on 32-bit Fedora, but in any case this fixes it.
- Build message_lib only after message generation On faster machines, the makefile generated by cmake will thread quite a lot, and will attempt to compile messages_lib before the header files have been generated, failing the build. This will force make to wait for the message generation to complete.
- Contributors: Scott K Logan, atenpas
1.0.5 (2014-03-18)
- updated CMakeLists.txt and package.xml
- Contributors: atenpas
1.0.4 (2014-03-13)
- added visualization_msgs to manifest and CMakeLists
- Contributors: Andreas
1.0.2 (2014-03-12)
- 1.0.1
- updated CHANGELOG
- fixed catkin warnings (using catkin_lint)
- Contributors: Andreas
1.0.1 (2014-03-12)
- fixed catkin warnings (using catkin_lint)
- Contributors: Andreas
1.0.0 (2014-03-09)
- moved from bitbucket to github
- Initial commit
- Contributors: atenpas
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| cmake_modules | |
| eigen_conversions | |
| geometry_msgs | |
| message_generation | |
| roscpp | |
| pcl_conversions | |
| std_msgs | |
| tf | |
| tf_conversions | |
| visualization_msgs | |
| catkin | |
| message_runtime |
System Dependencies
| Name |
|---|
| liblapack-dev |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged handle_detector at Robotics Stack Exchange
|
|
handle_detector package from handle_detector repohandle_detector |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/atenpas/handle_detector.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2014-10-11 |
| Dev Status | MAINTAINED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Andreas ten Pas
Authors
Handle Detector
Author: Andreas ten Pas (atp@ccs.neu.edu)
Version: 1.0.0
Wiki: http://wiki.ros.org/handle_detector
Author’s Website: http://www.ccs.neu.edu/home/atp/
REQUIREMENTS
- ROS Hydro (http://wiki.ros.org/hydro)
- Lapack (install in Ubuntu using: sudo apt-get install liblapack-dev)
- Openni_launch (http://wiki.ros.org/openni_launch; install in Ubuntu using: sudo apt-get install ros-hydro-openni-launch)
INSTRUCTIONS
Please look at http://wiki.ros.org/handle_detector for detailed instructions.
LINKS
Instructions: http://wiki.ros.org/handle_detector Source: https://github.com/atenpas/handle_detector
Changelog for package handle_detector
1.1.0 (2014-07-24)
- updated readme
- updated CMakeLists and package.xml
- cleaned up folders; added documentation
- added importance sampling (reduces number of samples)
- Contributors: atenpas
1.0.7 (2014-04-09)
- removed LIBRARIES from catkin_package(...) call in CMakeLists.txt
- changed naming of libraries and executable in CMakeLists.txt so that it contains the project name
- added libs to install targets in CMakeLists
- Contributors: atenpas
1.0.6 (2014-03-25)
- Merge pull request #1 from cottsay/master Fix Fedora build errors
- Move default affordances values into source file I really couldn't tell you exactly why this was failing builds on 32-bit Fedora, but in any case this fixes it.
- Build message_lib only after message generation On faster machines, the makefile generated by cmake will thread quite a lot, and will attempt to compile messages_lib before the header files have been generated, failing the build. This will force make to wait for the message generation to complete.
- Contributors: Scott K Logan, atenpas
1.0.5 (2014-03-18)
- updated CMakeLists.txt and package.xml
- Contributors: atenpas
1.0.4 (2014-03-13)
- added visualization_msgs to manifest and CMakeLists
- Contributors: Andreas
1.0.2 (2014-03-12)
- 1.0.1
- updated CHANGELOG
- fixed catkin warnings (using catkin_lint)
- Contributors: Andreas
1.0.1 (2014-03-12)
- fixed catkin warnings (using catkin_lint)
- Contributors: Andreas
1.0.0 (2014-03-09)
- moved from bitbucket to github
- Initial commit
- Contributors: atenpas
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| eigen_conversions | |
| geometry_msgs | |
| message_generation | |
| roscpp | |
| pcl_ros | |
| pcl_conversions | |
| std_msgs | |
| tf | |
| tf_conversions | |
| visualization_msgs | |
| catkin | |
| message_runtime |
System Dependencies
| Name |
|---|
| liblapack-dev |
Dependant Packages
| Name | Deps |
|---|---|
| rosjava_messages |
Launch files
Services
Plugins
Recent questions tagged handle_detector at Robotics Stack Exchange
|
|
handle_detector package from handle_detector repohandle_detector |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.3.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/atenpas/handle_detector.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2018-07-22 |
| Dev Status | MAINTAINED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Andreas ten Pas
Authors
Handle Detector
Author: Andreas ten Pas (atp@ccs.neu.edu)
Version: 1.0.0
Wiki: http://wiki.ros.org/handle_detector
Author’s Website: http://www.ccs.neu.edu/home/atp/
OVERVIEW
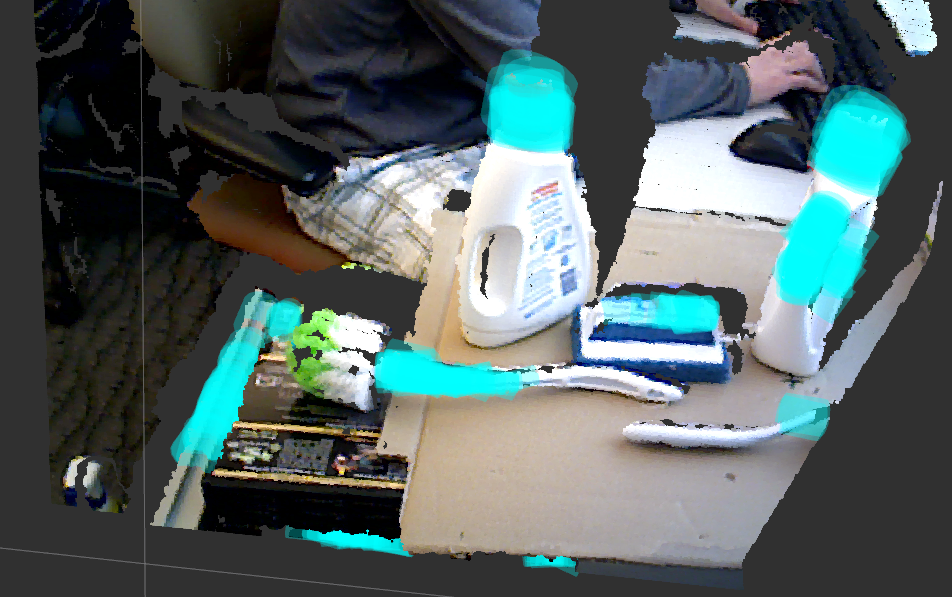
This package takes a point cloud as input and produces a list of handels / enveloping grasp affordances as output.
Input: point cloud
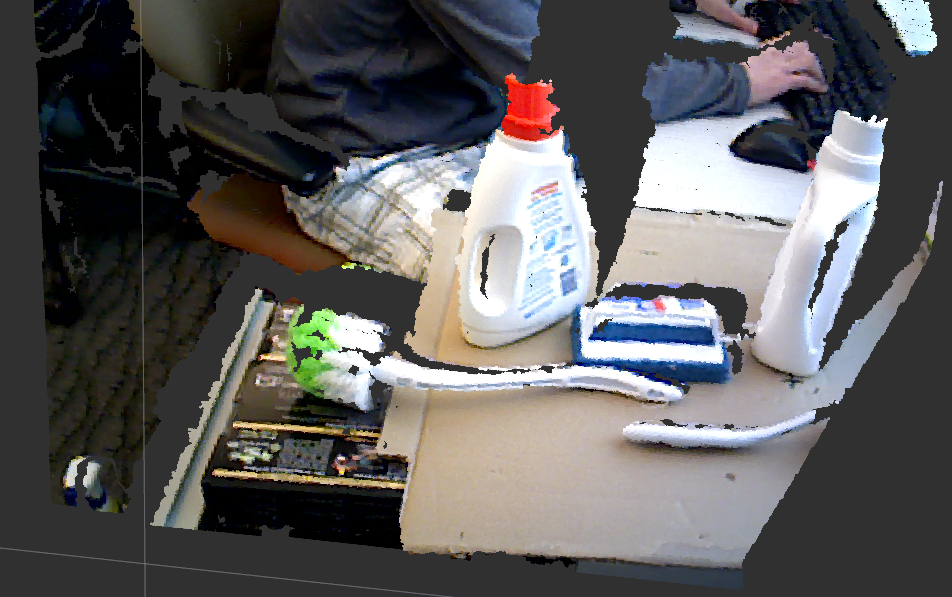
Output: handles / enveloping grasp affordances
REQUIREMENTS
- ROS Kinetic (http://wiki.ros.org/kinetic)
- Lapack (install in Ubuntu using: sudo apt-get install liblapack-dev)
- Openni_launch (http://wiki.ros.org/openni_launch; install in Ubuntu using: sudo apt install ros-kinetic-openni-launch)
INSTRUCTIONS
- Run handle detection on a *.pcd file:
roslaunch handle_detector localization_pcd_file.launch - Run handle detection with a depth sensor (e.g., Kinect):
roslaunch handle_detector localization_sensor.launch - Run handle detection with importance sampling on a *.pcd file:
roslaunch handle_detector importance_sampling_pcd_file.launch
For detailed instructions, have a look at: http://wiki.ros.org/handle_detector.
Changelog for package handle_detector
1.3.1 (2015-06-16)
- removed pcl ros includes from importance sampling
- update CHANGELOG
- update CHANGELOG
- Contributors: atenpas
1.3.0 (2015-06-10)
- remove pcl_ros dependency
- Contributors: atenpas
1.2.0 (2015-05-16)
- update launch files with relative paths
- Contributors: atenpas
1.1.1 (2015-05-14)
- updated CMakeList for indigo
- speeds up shell search (thanks to Sachin Patil)
- added workspace filter with transform; changed BCI numbering
- changed to std::size_t where std::vectors are used in for loops
- Contributors: atenpas
1.1.0 (2014-07-24)
- updated readme
- updated CMakeLists and package.xml
- cleaned up folders; added documentation
- added importance sampling (reduces number of samples)
- Contributors: atenpas
1.0.7 (2014-04-09)
- removed LIBRARIES from catkin_package(...) call in CMakeLists.txt
- changed naming of libraries and executable in CMakeLists.txt so that it contains the project name
- added libs to install targets in CMakeLists
- Contributors: atenpas
1.0.6 (2014-03-25)
- Merge pull request #1 from cottsay/master Fix Fedora build errors
- Move default affordances values into source file I really couldn't tell you exactly why this was failing builds on 32-bit Fedora, but in any case this fixes it.
- Build message_lib only after message generation On faster machines, the makefile generated by cmake will thread quite a lot, and will attempt to compile messages_lib before the header files have been generated, failing the build. This will force make to wait for the message generation to complete.
- Contributors: Scott K Logan, atenpas
1.0.5 (2014-03-18)
- updated CMakeLists.txt and package.xml
- Contributors: atenpas
1.0.4 (2014-03-13)
- added visualization_msgs to manifest and CMakeLists
- Contributors: Andreas
1.0.2 (2014-03-12)
- 1.0.1
- updated CHANGELOG
- fixed catkin warnings (using catkin_lint)
- Contributors: Andreas
1.0.1 (2014-03-12)
- fixed catkin warnings (using catkin_lint)
- Contributors: Andreas
1.0.0 (2014-03-09)
- moved from bitbucket to github
- Initial commit
- Contributors: atenpas
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| cmake_modules | |
| eigen_conversions | |
| geometry_msgs | |
| message_generation | |
| roscpp | |
| pcl_conversions | |
| std_msgs | |
| tf | |
| tf_conversions | |
| visualization_msgs | |
| catkin | |
| message_runtime |
System Dependencies
| Name |
|---|
| liblapack-dev |