
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.



Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
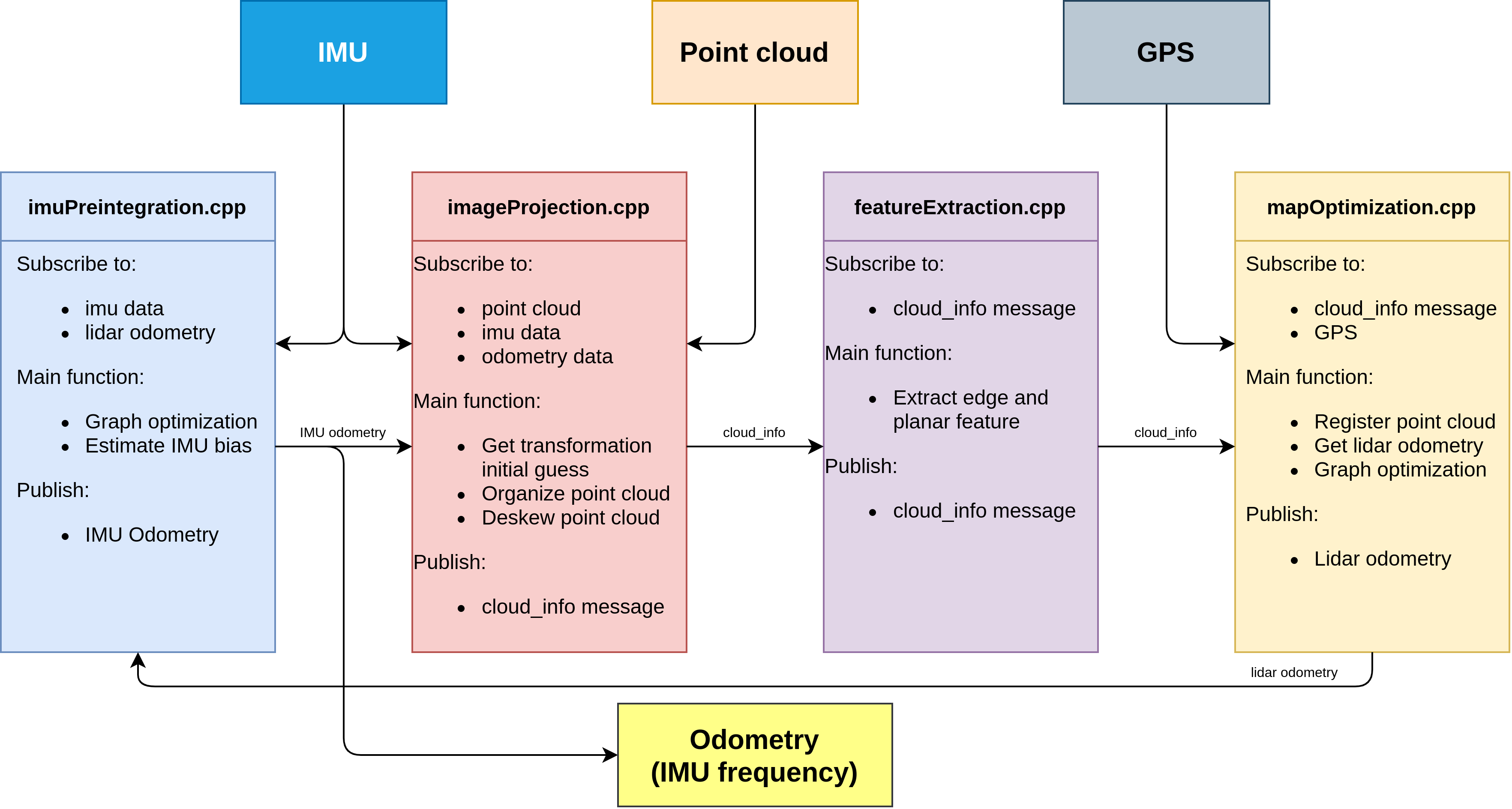
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lio_sam at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | TODO |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tixiao Shan
Authors
- Tixiao Shan
LIO-SAM
A real-time lidar-inertial odometry package. We strongly recommend the users read this document thoroughly and test the package with the provided dataset first. A video of the demonstration of the method can be found on YouTube.
Menu
-
Prepare lidar data (must read)
-
Prepare IMU data (must read)
System architecture
We design a system that maintains two graphs and runs up to 10x faster than real-time.
- The factor graph in “mapOptimization.cpp” optimizes lidar odometry factor and GPS factor. This factor graph is maintained consistently throughout the whole test.
- The factor graph in “imuPreintegration.cpp” optimizes IMU and lidar odometry factor and estimates IMU bias. This factor graph is reset periodically and guarantees real-time odometry estimation at IMU frequency.
Notes on ROS2 branch
There are some features of the original ROS1 version that are currently missing in this ROS2 version, namely:
- Testing with Velodyne & Livox lidars and Microstrain IMUs
- A launch file for the navsat module/GPS factor
- The rviz2 configuration misses many elements
This branch was tested with Ouster lidars, Xsens IMUs and SBG-Systems IMUs using the following ROS2 drivers:
In these tests, the IMU was mounted on the bottom of the lidar such that their x-axes pointed in the same direction. The parameters extrinsicRot and extrinsicRPY in params.yaml correspond to this constellation.
Dependencies
Tested with ROS2 versions foxy and galactic on Ubuntu 20.04 and humble on Ubuntu 22.04
sudo apt install ros-<ros2-version>-perception-pcl \
ros-<ros2-version>-pcl-msgs \
ros-<ros2-version>-vision-opencv \
ros-<ros2-version>-xacro
- gtsam (Georgia Tech Smoothing and Mapping library)
# Add GTSAM-PPA
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
Install
Use the following commands to download and compile the package.
cd ~/ros2_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd lio-sam
git checkout ros2
cd ..
colcon build
Prepare lidar data
File truncated at 100 lines see the full file