
|
maliput_viz package from maliput_viz repomaliput_viz |
Package Summary
| Tags | No category tags. |
| Version | 0.1.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | 3d-visualizer for the maliput's road network |
| Checkout URI | https://github.com/maliput/maliput_viz.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-05-08 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
![]()
maliput_viz
Description
maliput_viz package is part of the Maliput family.
It offers a visualizer for analyzing the road networks.
Note: For full information about Maliput please visit Maliput Documentation.
How to use it
maliput_viz application is provided by maliput_viz package.
After installation simply run:
maliput_viz
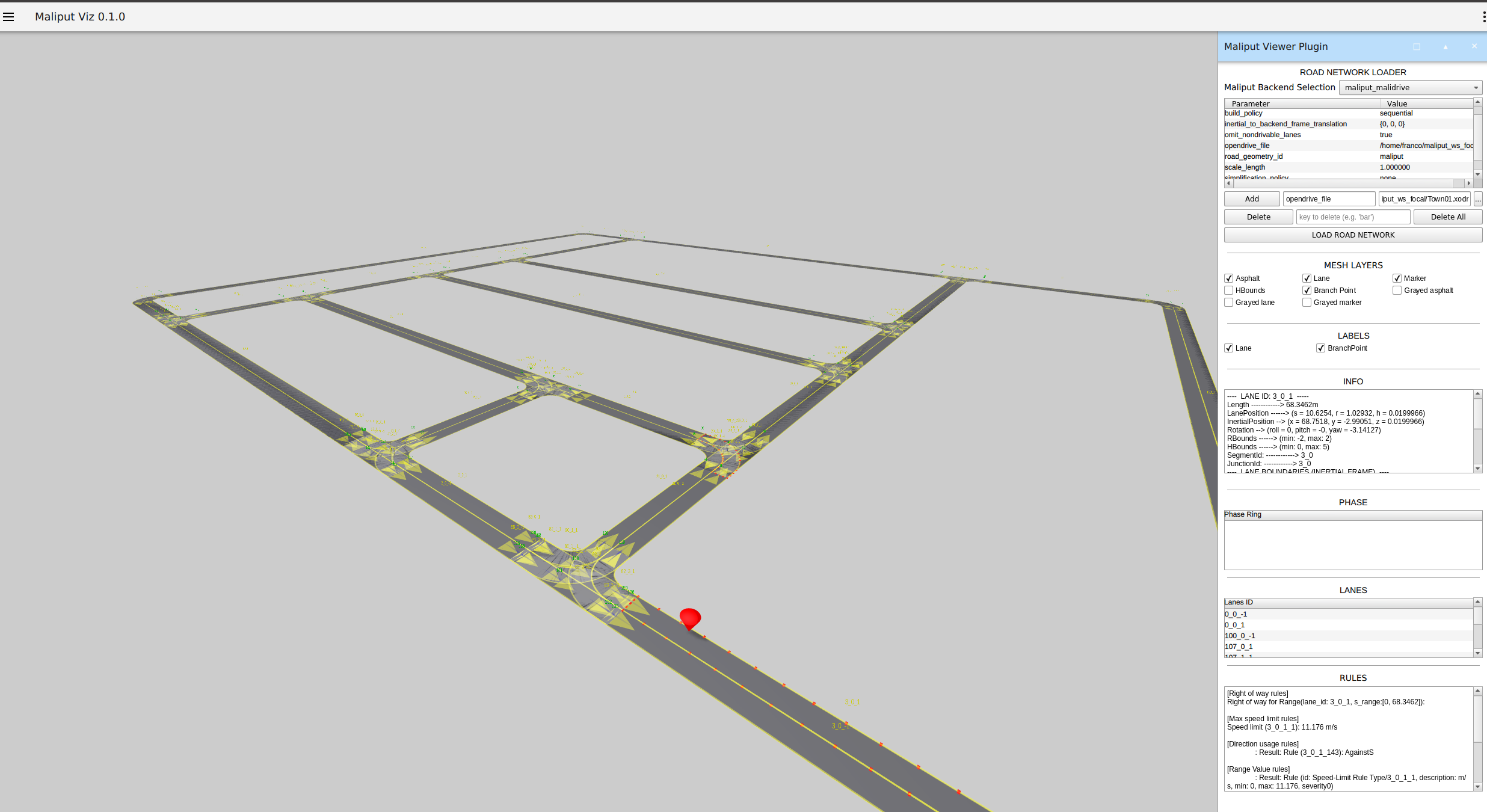
In the top-right of the window options about the road network loading can be found:
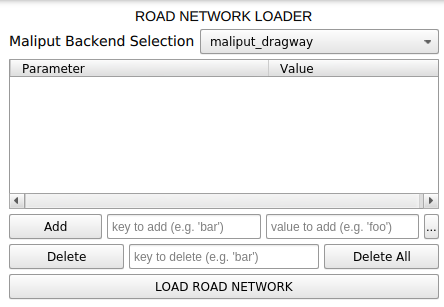
maliput_viz uses the maliput plugin architecture for loading the maliput backends in runtime.
In general, each backend would receive a set of parameters that defines the behavior of the road network loader. For example, in the maliput_malidrive backend, the opendrive_file parameter holds the path to a XODR map file.
When a backend is selected, the default parameter set for it is filled up. The user can add, edit or remove any parameter as they please.
After hitting the Load Road Network button, the correspondent backend will load up a maliput RoadNetwork and it will be displayed.
The UI provides several options for changing visibilities of the meshes and also providing useful information about several things like: lane description, rules and phases, among others.
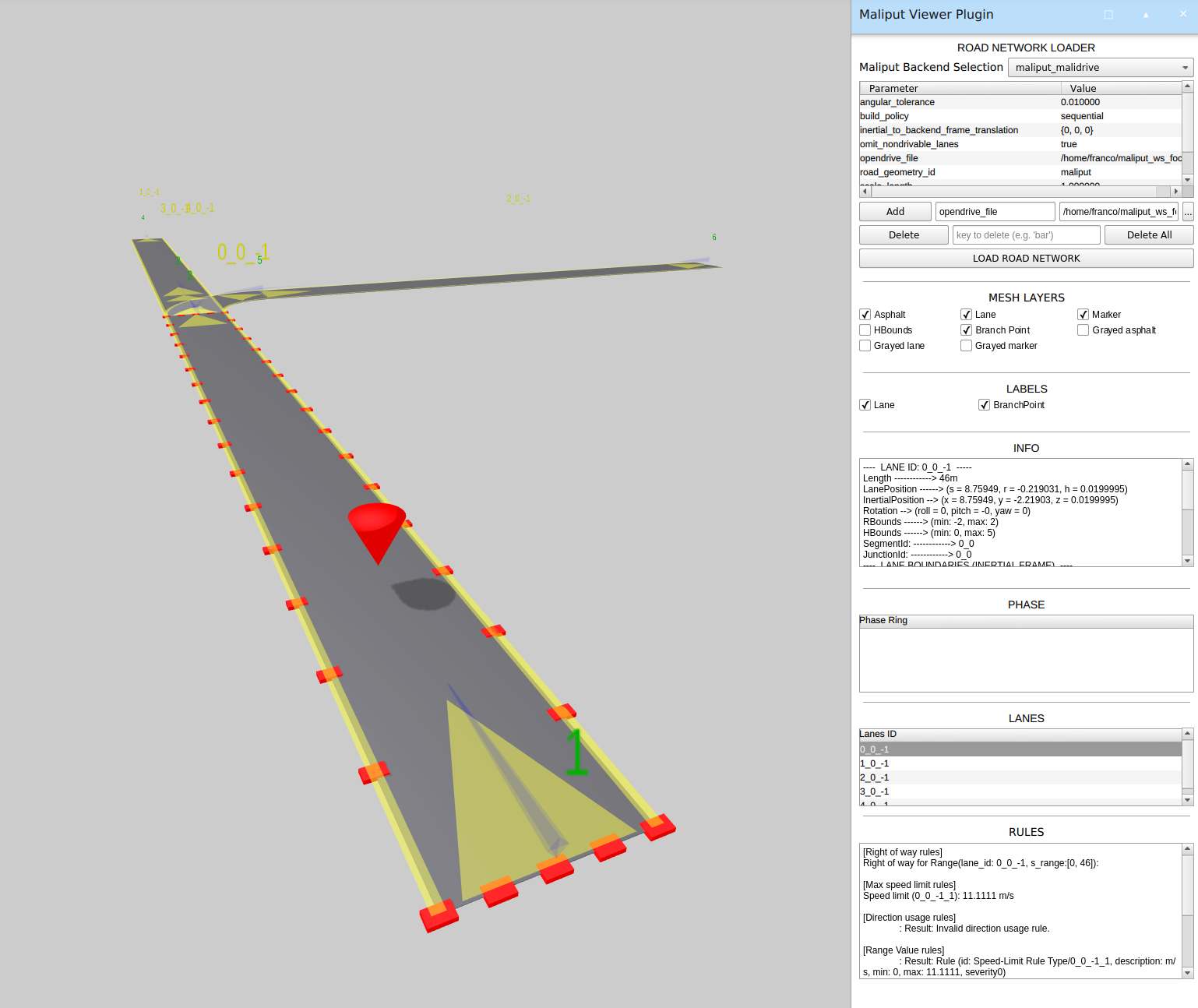
Demo
The following video shows a maliput Road Network being loaded using maliput_malidrive backend.
Besides the XODR files for the RoadGeometry, also other entities are being loaded to complete the RoadNetwork such as: RuleRegistry, RoadRulebook, TrafficLightBook and PhaseRingBook.
Installation
Supported platforms
Ubuntu Focal Fossa 20.04 LTS, ROS2 Foxy.
Binary Installation on Ubuntu
See Installation Docs.
Source Installation on Ubuntu
Prerequisites
sudo apt install python3-rosdep python3-colcon-common-extensions
Build
- Create colcon workspace if you don’t have one yet.
mkdir colcon_ws/src -p
- Clone this repository in the
srcfolder
cd colcon_ws/src
git clone https://github.com/maliput/maliput_viz.git
- Install package dependencies via
rosdep
export ROS_DISTRO=foxy
rosdep update
rosdep install -i -y --rosdistro $ROS_DISTRO --from-paths src
- Build the package
colcon build --packages-up-to maliput_viz
**Note**: To build documentation a `-BUILD_DOCS` cmake flag is required:
colcon build --packages-select maliput_viz --cmake-args " -DBUILD_DOCS=On"
More info at [Building Documentation](https://maliput.readthedocs.io/en/latest/developer_guidelines.html#building-the-documentation).
For further info refer to Source Installation on Ubuntu
For development
It is recommended to follow the guidelines for setting up a development workspace as described here.
Contributing
Please see CONTRIBUTING page.
License
![]()
Changelog for package maliput_viz
0.1.1 (2023-03-13)
- Evolves dependency tag to <depend> for the ignition-gui3 package. (#22)
- Contributors: Franco Cipollone
0.1.0 (2022-12-13)
- Adds command line support for the maliput viz app. (#18)
- Fills edition boxes when a parameter is clicked. (#17)
- Uses env hooks instead of compiled paths. (#10)
- Updates README file. (#6)
- Adds missing doxygen file. (#8)
- Bring maliput_viewer application from delphyne_gui (#1)
- Initial commit
- Contributors: Franco Cipollone
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_doxygen | |
| ament_cmake_clang_format | |
| ament_cmake_gtest | |
| maliput |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| maliput_full |