
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
 Then we need to launch the rm_driver node.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
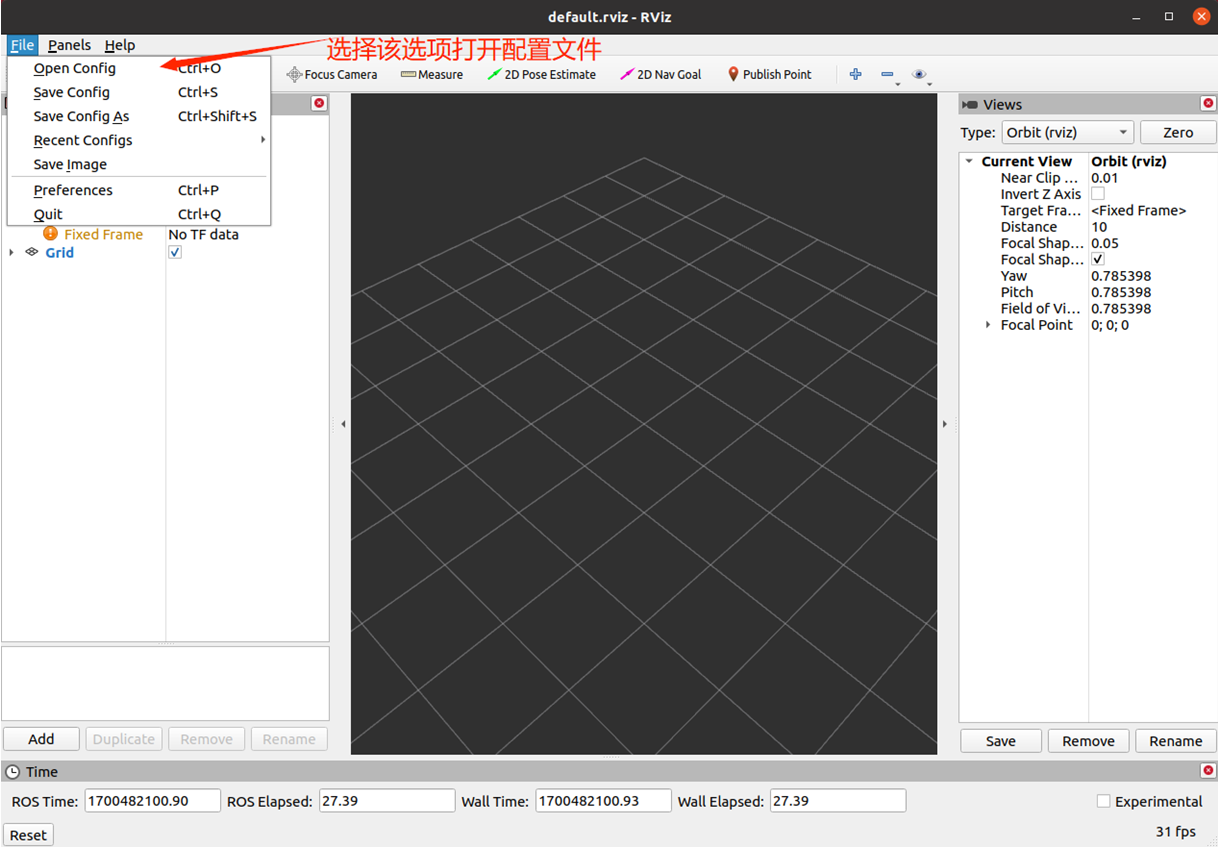
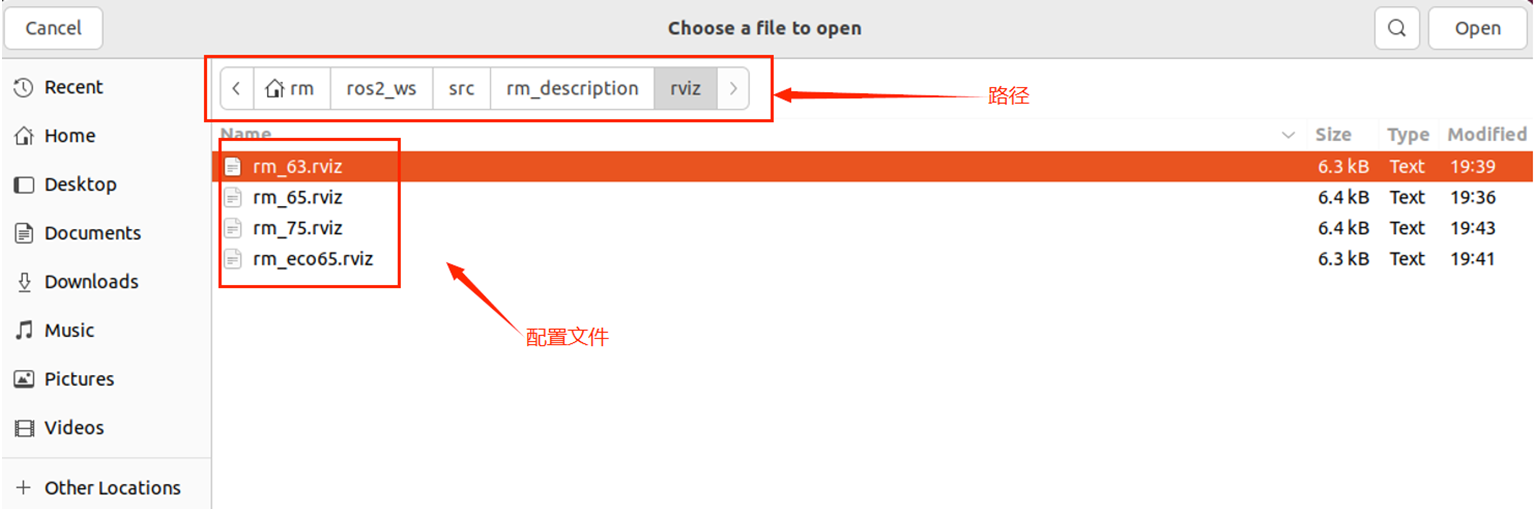
Find the corresponding configuration file under the rviz folder of the rm_description package.
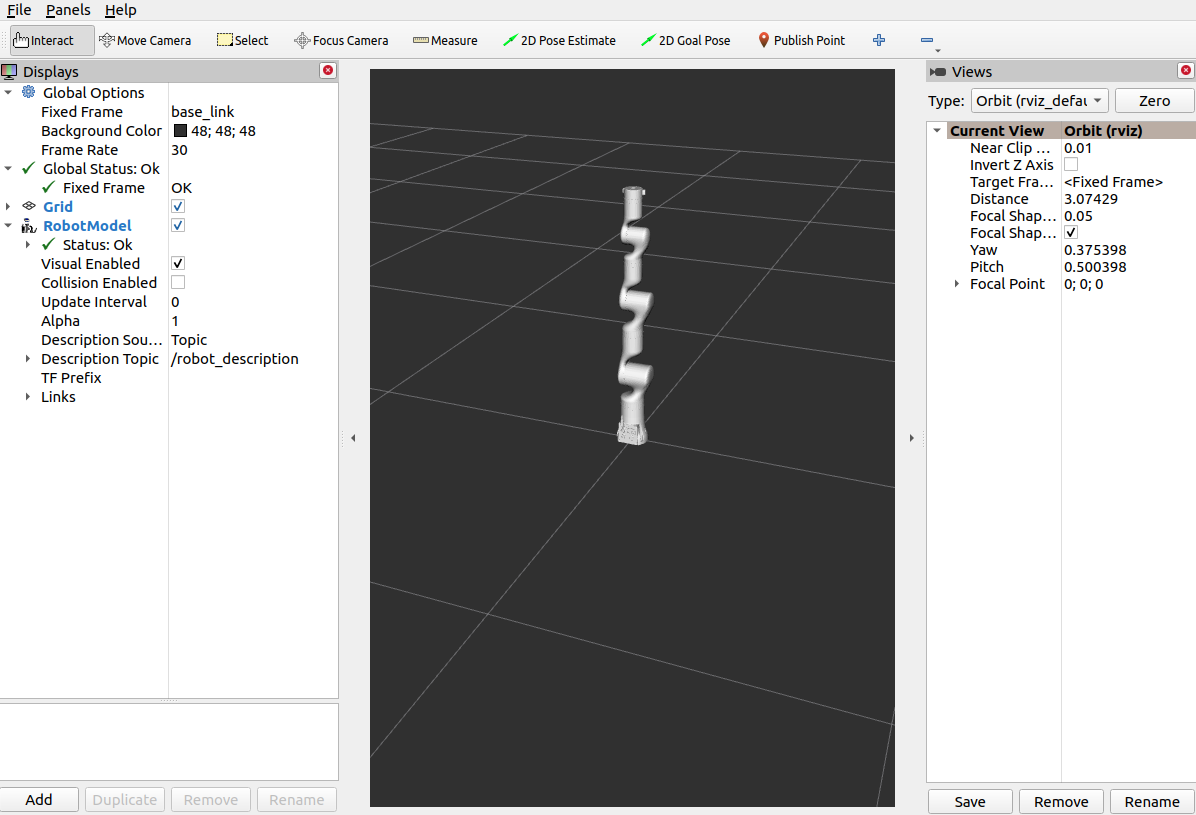
 After loading, you can see the current state of the robotic arm in the interface of rviz2.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
Find the corresponding configuration file under the rviz folder of the rm_description package.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
Find the corresponding configuration file under the rviz folder of the rm_description package.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
Find the corresponding configuration file under the rviz folder of the rm_description package.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
Find the corresponding configuration file under the rviz folder of the rm_description package.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
Find the corresponding configuration file under the rviz folder of the rm_description package.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
Find the corresponding configuration file under the rviz folder of the rm_description package.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from ros2_rm_robot repocontrol_arm_move force_position_control get_arm_state rm_bringup rm_control rm_description rm_doc rm_driver rm_example rm_gazebo rm_install rm_63_config rm_65_config rm_75_config rm_eco63_config rm_eco65_config rm_gen72_config rm_ros_interfaces |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 was developed for the Realman robot (http://www.realman-robotics.com/). |
| Checkout URI | https://github.com/realmanrobot/ros2_rm_robot.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ubuntu
Authors
Content
- 1.rm_description Package Description
- 2.rm_description Package Use
- 3.rm_description Package Architecture Description
- 3.1Overview of Package Files
- 4.rm_description Topic Description
rm_description_Package_Description
rm_description is a function package for displaying the robot model and TF transformation. Through this package, we can realize the linkage effect between a virtual robotic arm in a computer and a real robot arm in reality. In the moveit2 control, we also need the support of this package. This package is introduced in detail in the following aspects.
- 1.Package use.
- 2.Package architecture description.
- 3.Package topic description. Through the introduction of the three parts, it can help you:
- 1.Understand the package use.
- 2.Familiar with the file structure and function of the package.
- 3.Familiar with the topic related to the package for easy development and use.
Source code address:https://github.com/RealManRobot/ros2_rm_robot.git.
rm_description_Package_Use
First, after configuring the environment and completing the connection, we can directly start the node and run the rm_description package.
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_display.launch.py
In practice, the above
The command to start the six-axis force version of the manipulator is (note: eco63 is not available):
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6f_display.launch.py
The command to start the integrated six-axis force version of the manipulator is :
rm@rm-desktop:~$ ros2 launch rm_description rm_<arm_type>_6fb_display.launch.py
For example, the launch command of 65 robotic arm:
rm@rm-desktop:~$ ros2 launch rm_description rm_65_display.launch.py
The following screen appears in the interface after successful node startup.
Then we need to launch the rm_driver node.
rm@rm-desktop:~$ ros2 launch rm_driver rm_<arm_type>_driver.launch.py
After a successful launch, we can check the state of the robotic arm in rviz2. Run the following command to launch rviz2.
rm@rm-desktop:~$ rviz2
Open the robot model with the following configuration.
Find the corresponding configuration file under the rviz folder of the rm_description package.
After loading, you can see the current state of the robotic arm in the interface of rviz2.
rm_description_Package_Architecture_Description
Overview_of_package_files
The current rm_description package is composed of the following files.
``` ├── CMakeLists.txt # compilation rule file ├── launch │ ├── rm_63_6f_display.launch.py # 63 six-axis force launch file │ ├── rm_63_6fb_display.launch.py # 63 integrated six-axis force launch file │ ├── rm_63_display.launch.py # 63 launch file │ ├── rm_63_III_6fb_display.launch.py # 63_III integrated six-axis force launch file │ ├── rm_63_III_display.launch.py # 63_III launch file │ ├── rm_65_6f_display.launch.py # 65 six-axis force launch file │ ├── rm_65_6fb_display.launch.py # 65 integrated six-axis force launch file │ ├── rm_65_display.launch.py # 65 launch file │ ├── rm_75_6f_display.launch.py # 75 six-axis force launch file │ ├── rm_75_6fb_display.launch.py # 75 integrated six-axis force launch file │ ├── rm_75_display.launch.py # 75 launch file │ ├── rm_eco65_6f_display.launch.py # eco65 six-axis force launch file │ ├── rm_eco65_6fb_display.launch.py # eco65 integrated six-axis force launch file │ ├── rm_eco65_display.launch.py # eco65 launch file │ ├── rm_eco63_6fb_display.launch.py # eco63 integrated six-axis force launch file │ ├── rm_eco63_display.launch.py # eco63 launch file │ └── rm_gen72_display.launch.py # gen72 launch file
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rm_description at Robotics Stack Exchange
|
|
rm_description package from rm_description reporm_description |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/rm-controls/rm_description.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-06-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Qiayuan Liao
Authors
- Qiayuan Liao
rm_description
Overview
This is a ROS package with description files of RoboMaster robot made by DynamicX.
Keywords: RoboMaster, URDF, description
Or, add some keywords to the Bitbucket or GitHub repository.
License
The source code is released under a BSD 3-Clause license.
Author: QiayuanLiao
Affiliation: DynamicX
Maintainer: QiayuanLiao, liaoqiayuan@gmail.com
The rm_description package has been tested under [ROS] Noetic on respectively 18.04 and 20.04. This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
Installation
Building from Source
Dependencies
- Robot Operating System (ROS) (middleware for robotics),
-
rm_gazebo if
use_rm_gazbe - gazebo_ros
- gazebo_ros_control
- xacro
Building
To build from source, clone the latest version from this repository into your catkin workspace and compile the package using
cd catkin_workspace/src
git clone git@github.com:gdut-dynamic-x/rm_description.git
# git clone https://github.com/gdut-dynamic-x/rm_description.git
cd ../
rosdep install --from-paths . --ignore-src
catkin build # Actually nothing to build
Usage
Run the simulation with:
roslaunch rm_description hero.launch
Config files
- worlds/empty.worlds Simulate physics eigen params.
Launch files
-
hero.launch: Launch Gazebo and load hero robot.
Loading argument set
-
load_chassisLoad chassis URDF. Default:true. -
load_gimbalLoad gimbal URDF. Default:true. -
load_shooterLoad shooter URDF. Default:true. -
load_gazeboLoad Gazebo params and run Gazebo. Default:true. -
use_rm_gazeboUse Gazebo params and run Gazebo. Default:false. -
pausedPaused simulation when load Gazbeo. Default:true.
Chassis argument set
-
roller_typeHow to simulate the roller of mecanum wheel, setsimpleto use sphere roller for speed up simulation, setnonefor real robot. Default:realistic(use one sphere with two capsule roller.stl).
-
Bugs & Feature Requests
Please report bugs and request features using the Issue Tracker .
Changelog for package rm_description
0.1.9 (2022-04-01)
- Add omni wheel urdf
- Complete omni wheel urdf
- Add test launch file to check urdf
- Rename launch file.Delete roller_type in urdf.Change args of hook
- Merge pull request #21 from ye-luo-xi-tui/omni_wheel
- Fix errors of swerve urdf
- Add CI/CD action
- Create Doxyfile
- Create .pre-commit-config.yaml
- Add permissions to script
- Delete pre_release.yml
- Merge pull request #3 from YuuinlH/-master
- Merge pull request #4 from YuuinlH/-master
- Update deb_package.yml
- Merge pull request #5 from YuuinlH/-master
- Update package.sh
- Delete doxygen action(Uesless)
- Add"none"type of omni_wheel roller.Set"none"for real robot
- Fix error in check_joint.launch.Add rviz launch.
- Merge pull request #8 from ye-luo-xi-tui/-master
- Add LICENSE file
- Update the hero description files
- Modify the format error of hero urdf files
- Merge pull request #11 from Edwinlinks/-hero_urdf
- Contributors: Edwinlinks, QiayuanLiao, YuuinIH, qiayuan, yezi, mlione
0.1.8 (2021-12-7)
- Merge pull request #19 from ye-luo-xi-tui/fix_rmua_bug Fix rmua bug
- Change limit of rmua. (cherry picked from commit a1e4d841dd4cda83d50189a8f5d3bd84d604d244)
- Fix a bug in rmua urdf (cherry picked from commit cd6f7fac5c375cd74408620438039ca2c83437cd)
- Merge branch 'master' into master
- Update standard4.urdf.xacro and rm_hw/config/standard4.yaml.
- Merge remote-tracking branch 'origin/master'
- Merge pull request #16 from Edwinlinks/master Modify the date of standard in rm_description
- Modify the date of standard in rm_description
- Fix imu inertia and add imu to balance
- Merge branch 'master' into gimbal/opti_or_simplify
- Update CHANGELOG
- Update standard5's imu orientation
- Update IMU orientation of standard5.urdf.xacro
- Merge branch 'master' into gimbal/opti_or_simplify
- Merge branch 'master' into gimbal/opti_or_simplify
- Update URDF of imu
- Contributors: BruceLannn, Edwinlinks, QiayuanLiao, YuuinIH, qiayuan, yezi
0.1.7 (2021-09-26)
- 0.1.6
- Update CHANGELOG
- Update URDF of imu
- Contributors: qiayuan
0.1.6 (2021-09-26)
- Update URDF of imu
- Contributors: qiayuan
0.1.5 (2021-09-02)
0.1.4 (2021-09-02)
0.1.3 (2021-09-01)
- Merge branch 'master' into master
- Contributors: QiayuanLiao
- Merge branch 'master' into master
- Contributors: QiayuanLiao
0.1.2 (2021-08-14)
- Run pre-commit
- Contributors: qiayuan
0.1.1 (2021-08-12)
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| rm_control | |
| rm_gazebo |
Launch files
- launch/check_joint.launch
-
- robot_type [default: $(env ROBOT_TYPE)] — Robot type [standard, hero, engineer]
- load_chassis [default: true]
- load_gimbal [default: true]
- load_shooter [default: true]
- load_arm [default: true]
- roller_type [default: simple] — simple or realistic