
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
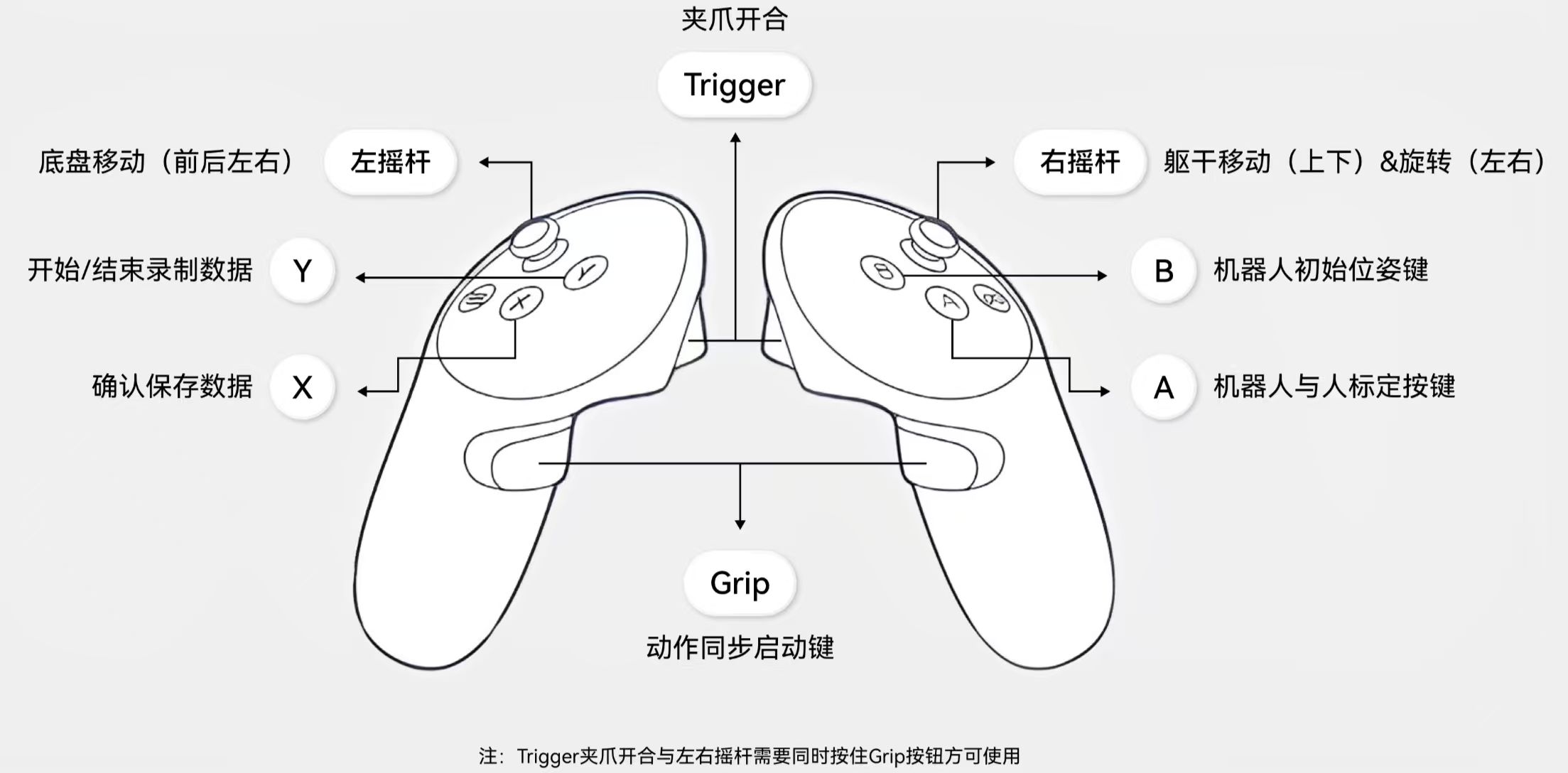
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
 </center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged teleoperation_interface at Robotics Stack Exchange
|
|
teleoperation_interface package from airspeed repodata_collection_service robot_interface sensor_interface teleoperation_interface |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airspeed.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-11-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airspeedbox
Authors
Teleoperation Interface - VR遥操作接口
VR机器人遥操作平台 - 遥操作接口部分
🎯 项目概述
这是基于ROS2框架的VR(虚拟现实)机器人遥操作平台的遥操作接口部分。该接口负责接收VR设备数据,进行处理和转换,然后通过ROS2话题实时发布给机器人接口。
核心特性:
- ✅ ROS2原生话题通信(无文件依赖)
- ✅ 实时数据流处理(低延迟<5ms)
- ✅ 稳定10Hz输出频率
- ✅ 模块化架构设计
- ✅ 线程安全的数据处理 1 按键介绍: B :机器人初始位姿键 A :机器人与人标定按键 Grip Button :动作同步启动键 Grip Button + Trigger Button :夹爪开合键
Grip Button + 左摇杆 :底盘移动 Grip Button + 右摇杆 :躯干上下运动 Y:开始/结束录制数据
x:确认保存数据
操作流程:
- 拿起手柄,保持【图示】状态: 按下 B 键,机器人回到初始位姿 按下 A 键,进行人机标走。
- 动作同步操作: 按住 Grip Button,晃动手柄,机器人将跟随手柄运动
- 夹爪控制: 按下Trigger Button,控制机器人的夹爪开台、
- 底盘&torso控制: 按住 Grip Button同时拨动摇杆控制底盘运动。 ·右手柄摇杆:控制机器人躯干上下运动。 ·左手柄摇杆:控制底盘移动
- 数据采集任务: 按下 Y 键,开始录制数据。此时可以进行数据采集操作。 再次按下 Y 键,结束录制数据。数据将预存。
- 数据保存: 按下 X 键,确认保存数据至 Orin 对应的任务文件夹中。 如果对刚采集的数据不满意,可直接按下 Y 键进行下一轮数据采集录制。
</center>
</center>
注意事项:
如果在采集过程中人移动了位置,请重新按下 A 键进行人机标定,以避免动作不同步或异常问题为确保数据采集质量,如果在采集过程中出现驱动异常,请先修复驱动问题,否则数据可能会受影响。
🏗️ 系统架构
VR设备 (Quest/Pico)
│
│ HTTPS POST (JSON, ~60-90Hz)
↓
┌─────────────────────────────────────────────┐
│ VR Data Server (vr_data_server.py) │
│ ├─ HTTPS Server (aiohttp, 5000端口) │
│ └─ VRDataPublisherNode (ROS2节点) │
│ └─ 发布: /vr_raw_data (String) │
└─────────────────────────────────────────────┘
│
│ ROS2 Topic: /vr_raw_data (std_msgs/String)
↓
┌─────────────────────────────────────────────┐
│ VR Teleoperation Node │
│ (vr_teleoperation_node.py) │
│ ├─ 订阅: /vr_raw_data │
│ ├─ 数据提取与转换 │
│ ├─ 坐标系转换 (VR → 标准) │
│ └─ 定时器发布 (10Hz稳定输出) │
│ ├─ /target_head_pose │
│ ├─ /target_left_arm_pose │
│ ├─ /target_left_buttons │
│ ├─ /target_right_arm_pose │
│ └─ /target_right_buttons │
└─────────────────────────────────────────────┘
│
│ ROS2 Topics (PoseStamped, Float32MultiArray)
↓
机器人接口 (Robot Interface)
📁 目录结构
``` teleoperation_interface/ ├── vr_teleoperation/ # 核心节点文件夹 │ ├── vr_data_server.py # VR数据接收服务器 + ROS2发布器 │ └── vr_teleoperation_node.py # VR数据处理与转换节点 ├── launch/ # ROS2启动文件 │ └── vr_teleoperation.launch.py # 统一启动文件 ├── config/ # 配置文件
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_python | |
| ament_lint_auto | |
| ament_lint_common | |
| rclpy | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs | |
| tf2_ros | |
| tf2_geometry_msgs |