
|
vda5050_connector package from ros_amr_interop repomassrobotics_amr_sender vda5050_connector vda5050_msgs vda5050_serializer |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD Clause 3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/inorbit-ai/ros_amr_interop.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-11-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Leandro Pineda
Authors
- John Alejandro Duarte Carrasco
- Leandro Pineda
VDA5050 Connector
A ROS2 package which implements a connector for VDA5050, a standardized interface for communication between fleets of AGVs/AMRs and a central Master Control.
Overview
The package names itself Connector, since it can be thought as a bridge between a VDA5050 Master Control (MC) and the ROS2 robot API.
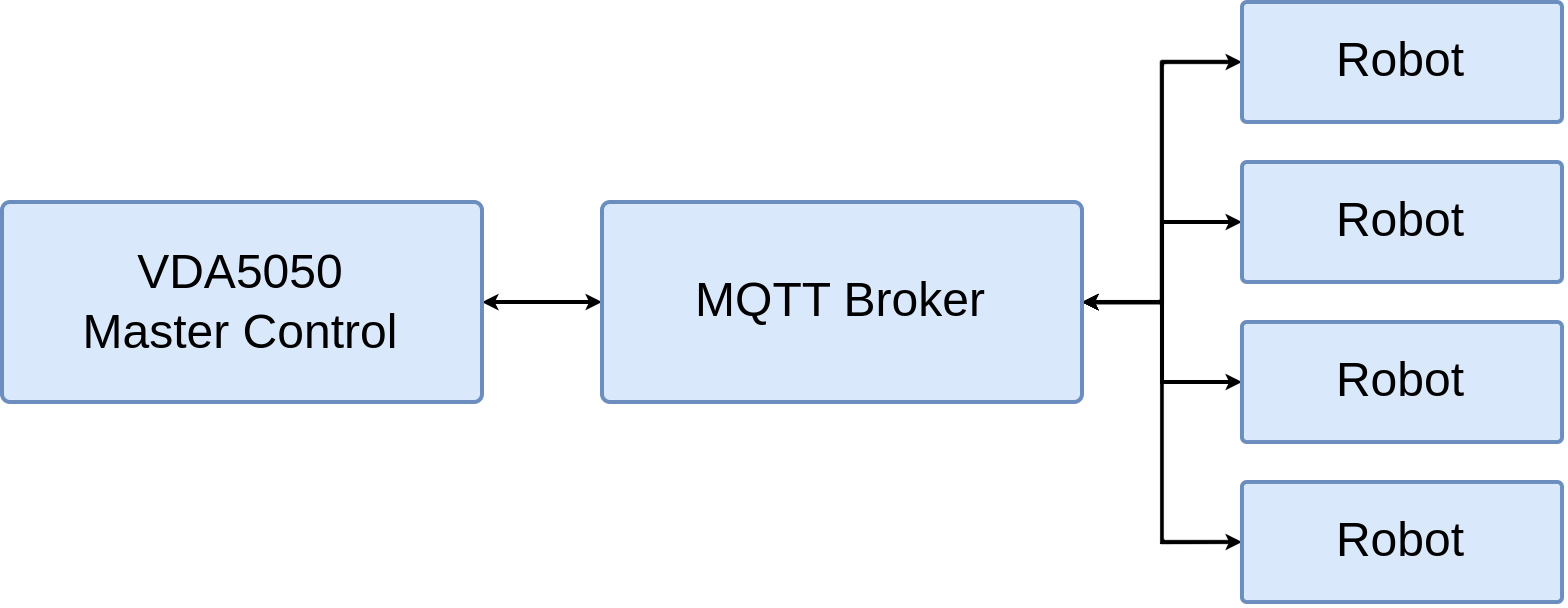
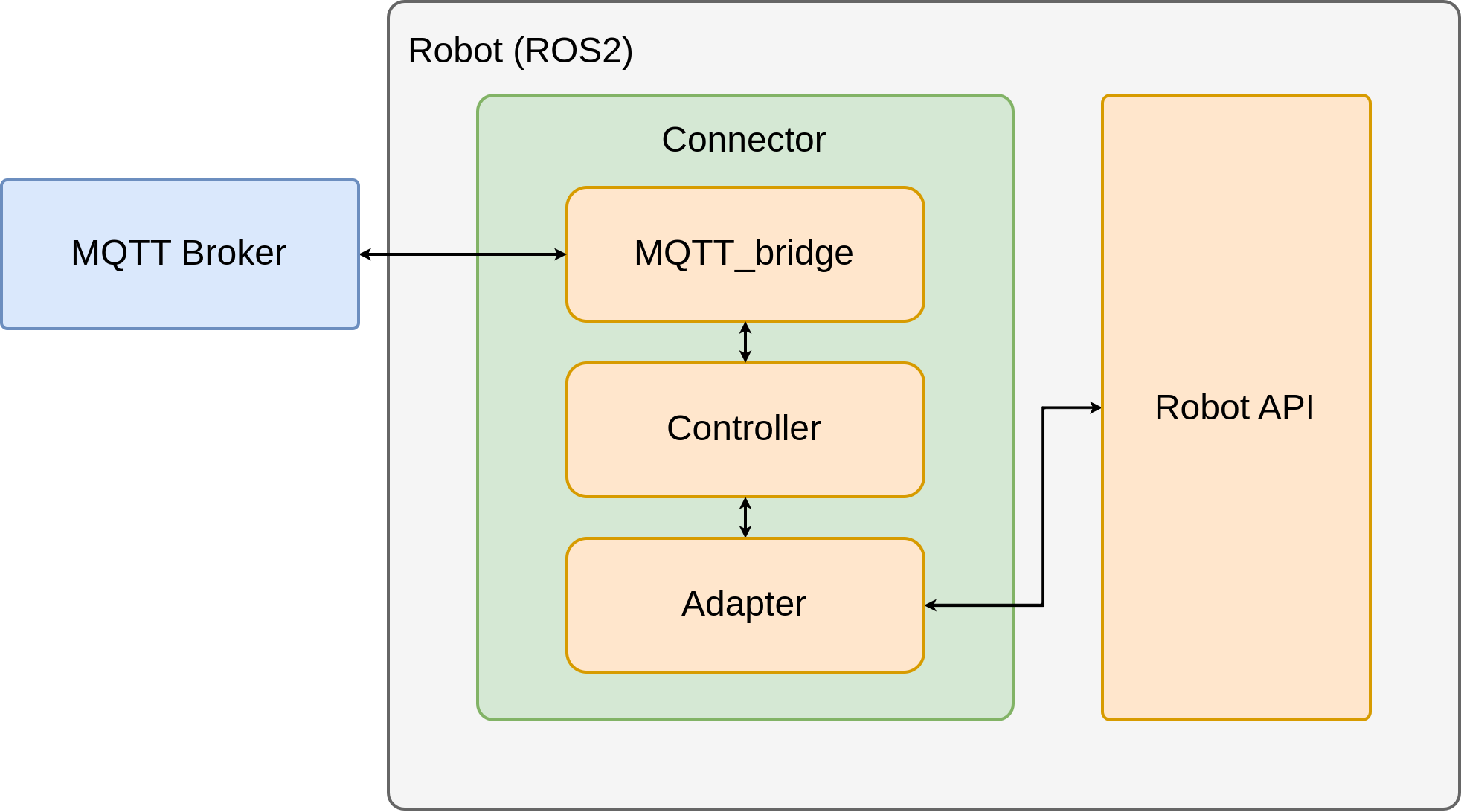
The connector is composed of three main parts (ROS2 nodes):
- MQTT_bridge: Communicates the VDA5050 <> ROS2 topics, translating VDA5050 messages into ROS2 vda5050_msgs and vice versa.
- Controller: Processes the VDA5050 robot execution as per standard specification. It validates, executes, or rejects orders and instant actions, as well as assembles feedback information to the MC.
- Adapter: Provides the interaction between the controller and the Robot API. The adapter is the one who knows how to send a navigation goal request, execute an action or retrieve specific information robot such as battery or odometry.
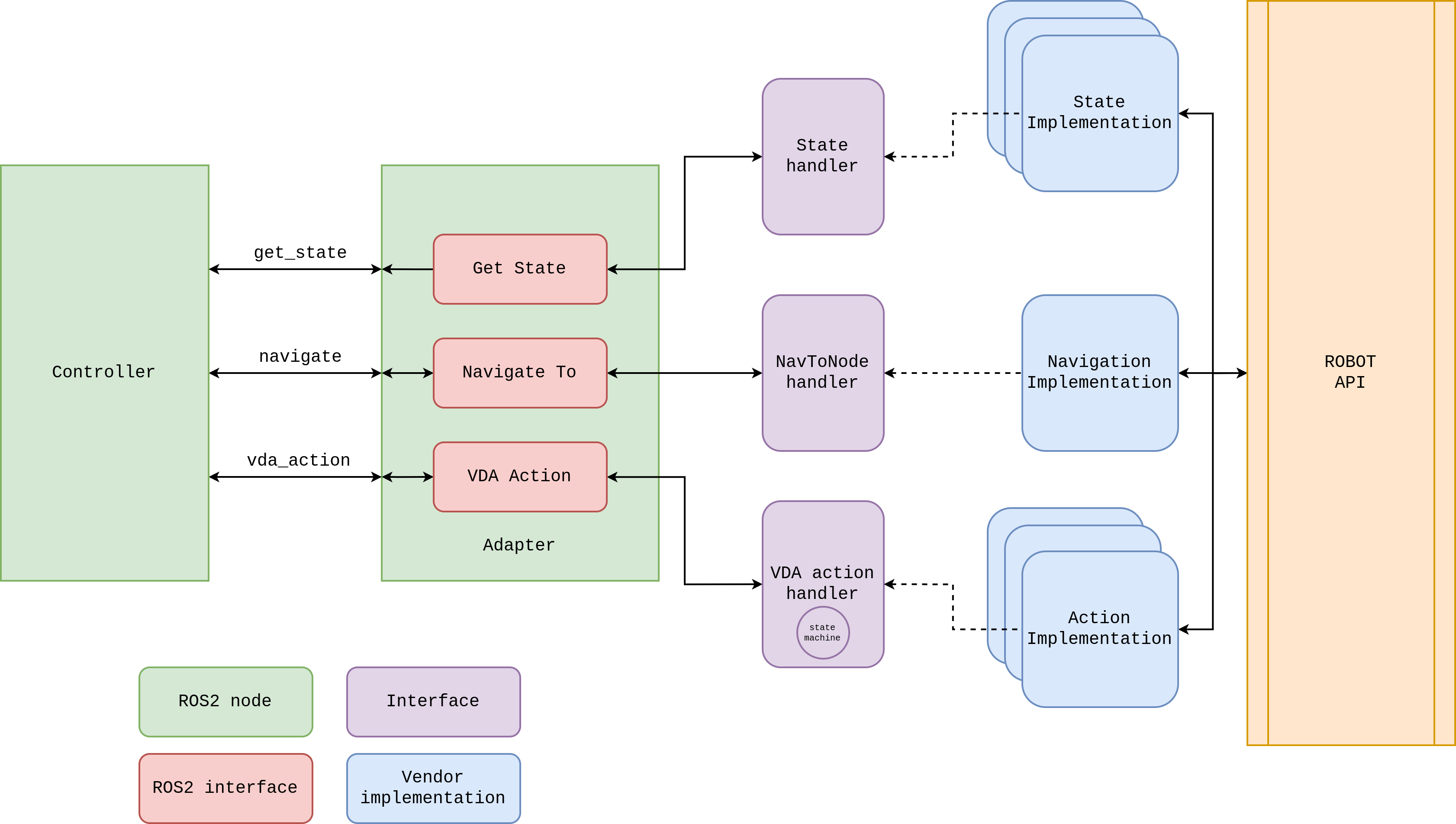
The way the adapter knows how to execute the different operations requested by the controller is using ROS2 plugins (components). The current project provides three plugin template interfaces, called handlers, which cover the main communication paths:
- State handler: Designed for updating robot specific information on the VDA5050 order_state.
- NavTONode handler: Designed for sending goals to the robot navigation stack.
- VDA Action handler: Designed for handling requests to execute specific actions (localize, lift a load, etc).
How to use it
The package is also a library package; it exports the headers and binary files to create and assemble a specific adapter. To create your own adapter package, add this package as a dependency and define the different plugin handlers for your robot. You can also customize the adapter core functionalities if desired.
To do this this, you can check the vda5050_examples repository, where you will find examples of adapter packages, for python and C++, as well as docker scripts to quickly start testing them.
Dependencies
- ROS2 - ament_cmake: The package is based on ROS2, and uses
ament_cmake. - vda5050_msgs: ROS2 messages for the VDA5050 standard (version 2.0).
- pluginlib: The adapter uses plugins to load the different handlers.
-
python3-paho-mqtt: The
mqtt_bridgeuses thepaho-mqttlibrary as the mqtt client.
Compilation
Download vda5050_msgs package into your ROS2 workspace
cd ~/dev_ws/ &&
git clone --branch ros2-vda5050-v2 https://github.com/ipa320/vda5050_msgs.git \
&& mv vda5050_msgs/vda5050_msgs ./src/vda5050_msgs \
&& mv vda5050_msgs/vda5050_serializer ./src/vda5050_serializer \
&& rm -rf vda5050_msgs
Then download this package into the ROS2 workspace src folder and compile it using colcon build.
Testing
The package provides several lint test (ament_pep257 and ament_flake8 for Python, ament_clang_format for C++ and ament_copyright), as well as specific unit tests to check the correct functionality of the different modules. To run the tests, execute:
colcon test --packages-select vda5050_connector && colcon test-result --verbose
Contributing
Please see the CONTRIBUTING document.
License
![]()
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from ros_amr_interop repomassrobotics_amr_sender vda5050_connector vda5050_msgs vda5050_serializer |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD Clause 3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/inorbit-ai/ros_amr_interop.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-11-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Leandro Pineda
Authors
- John Alejandro Duarte Carrasco
- Leandro Pineda
VDA5050 Connector
A ROS2 package which implements a connector for VDA5050, a standardized interface for communication between fleets of AGVs/AMRs and a central Master Control.
Overview
The package names itself Connector, since it can be thought as a bridge between a VDA5050 Master Control (MC) and the ROS2 robot API.
The connector is composed of three main parts (ROS2 nodes):
- MQTT_bridge: Communicates the VDA5050 <> ROS2 topics, translating VDA5050 messages into ROS2 vda5050_msgs and vice versa.
- Controller: Processes the VDA5050 robot execution as per standard specification. It validates, executes, or rejects orders and instant actions, as well as assembles feedback information to the MC.
- Adapter: Provides the interaction between the controller and the Robot API. The adapter is the one who knows how to send a navigation goal request, execute an action or retrieve specific information robot such as battery or odometry.
The way the adapter knows how to execute the different operations requested by the controller is using ROS2 plugins (components). The current project provides three plugin template interfaces, called handlers, which cover the main communication paths:
- State handler: Designed for updating robot specific information on the VDA5050 order_state.
- NavTONode handler: Designed for sending goals to the robot navigation stack.
- VDA Action handler: Designed for handling requests to execute specific actions (localize, lift a load, etc).
How to use it
The package is also a library package; it exports the headers and binary files to create and assemble a specific adapter. To create your own adapter package, add this package as a dependency and define the different plugin handlers for your robot. You can also customize the adapter core functionalities if desired.
To do this this, you can check the vda5050_examples repository, where you will find examples of adapter packages, for python and C++, as well as docker scripts to quickly start testing them.
Dependencies
- ROS2 - ament_cmake: The package is based on ROS2, and uses
ament_cmake. - vda5050_msgs: ROS2 messages for the VDA5050 standard (version 2.0).
- pluginlib: The adapter uses plugins to load the different handlers.
-
python3-paho-mqtt: The
mqtt_bridgeuses thepaho-mqttlibrary as the mqtt client.
Compilation
Download vda5050_msgs package into your ROS2 workspace
cd ~/dev_ws/ &&
git clone --branch ros2-vda5050-v2 https://github.com/ipa320/vda5050_msgs.git \
&& mv vda5050_msgs/vda5050_msgs ./src/vda5050_msgs \
&& mv vda5050_msgs/vda5050_serializer ./src/vda5050_serializer \
&& rm -rf vda5050_msgs
Then download this package into the ROS2 workspace src folder and compile it using colcon build.
Testing
The package provides several lint test (ament_pep257 and ament_flake8 for Python, ament_clang_format for C++ and ament_copyright), as well as specific unit tests to check the correct functionality of the different modules. To run the tests, execute:
colcon test --packages-select vda5050_connector && colcon test-result --verbose
Contributing
Please see the CONTRIBUTING document.
License
![]()
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from ros_amr_interop repomassrobotics_amr_sender vda5050_connector vda5050_msgs vda5050_serializer |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD Clause 3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/inorbit-ai/ros_amr_interop.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-11-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Leandro Pineda
Authors
- John Alejandro Duarte Carrasco
- Leandro Pineda
VDA5050 Connector
A ROS2 package which implements a connector for VDA5050, a standardized interface for communication between fleets of AGVs/AMRs and a central Master Control.
Overview
The package names itself Connector, since it can be thought as a bridge between a VDA5050 Master Control (MC) and the ROS2 robot API.
The connector is composed of three main parts (ROS2 nodes):
- MQTT_bridge: Communicates the VDA5050 <> ROS2 topics, translating VDA5050 messages into ROS2 vda5050_msgs and vice versa.
- Controller: Processes the VDA5050 robot execution as per standard specification. It validates, executes, or rejects orders and instant actions, as well as assembles feedback information to the MC.
- Adapter: Provides the interaction between the controller and the Robot API. The adapter is the one who knows how to send a navigation goal request, execute an action or retrieve specific information robot such as battery or odometry.
The way the adapter knows how to execute the different operations requested by the controller is using ROS2 plugins (components). The current project provides three plugin template interfaces, called handlers, which cover the main communication paths:
- State handler: Designed for updating robot specific information on the VDA5050 order_state.
- NavTONode handler: Designed for sending goals to the robot navigation stack.
- VDA Action handler: Designed for handling requests to execute specific actions (localize, lift a load, etc).
How to use it
The package is also a library package; it exports the headers and binary files to create and assemble a specific adapter. To create your own adapter package, add this package as a dependency and define the different plugin handlers for your robot. You can also customize the adapter core functionalities if desired.
To do this this, you can check the vda5050_examples repository, where you will find examples of adapter packages, for python and C++, as well as docker scripts to quickly start testing them.
Dependencies
- ROS2 - ament_cmake: The package is based on ROS2, and uses
ament_cmake. - vda5050_msgs: ROS2 messages for the VDA5050 standard (version 2.0).
- pluginlib: The adapter uses plugins to load the different handlers.
-
python3-paho-mqtt: The
mqtt_bridgeuses thepaho-mqttlibrary as the mqtt client.
Compilation
Download vda5050_msgs package into your ROS2 workspace
cd ~/dev_ws/ &&
git clone --branch ros2-vda5050-v2 https://github.com/ipa320/vda5050_msgs.git \
&& mv vda5050_msgs/vda5050_msgs ./src/vda5050_msgs \
&& mv vda5050_msgs/vda5050_serializer ./src/vda5050_serializer \
&& rm -rf vda5050_msgs
Then download this package into the ROS2 workspace src folder and compile it using colcon build.
Testing
The package provides several lint test (ament_pep257 and ament_flake8 for Python, ament_clang_format for C++ and ament_copyright), as well as specific unit tests to check the correct functionality of the different modules. To run the tests, execute:
colcon test --packages-select vda5050_connector && colcon test-result --verbose
Contributing
Please see the CONTRIBUTING document.
License
![]()
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from ros_amr_interop repomassrobotics_amr_sender vda5050_connector vda5050_msgs vda5050_serializer |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD Clause 3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/inorbit-ai/ros_amr_interop.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-11-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Leandro Pineda
Authors
- John Alejandro Duarte Carrasco
- Leandro Pineda
VDA5050 Connector
A ROS2 package which implements a connector for VDA5050, a standardized interface for communication between fleets of AGVs/AMRs and a central Master Control.
Overview
The package names itself Connector, since it can be thought as a bridge between a VDA5050 Master Control (MC) and the ROS2 robot API.
The connector is composed of three main parts (ROS2 nodes):
- MQTT_bridge: Communicates the VDA5050 <> ROS2 topics, translating VDA5050 messages into ROS2 vda5050_msgs and vice versa.
- Controller: Processes the VDA5050 robot execution as per standard specification. It validates, executes, or rejects orders and instant actions, as well as assembles feedback information to the MC.
- Adapter: Provides the interaction between the controller and the Robot API. The adapter is the one who knows how to send a navigation goal request, execute an action or retrieve specific information robot such as battery or odometry.
The way the adapter knows how to execute the different operations requested by the controller is using ROS2 plugins (components). The current project provides three plugin template interfaces, called handlers, which cover the main communication paths:
- State handler: Designed for updating robot specific information on the VDA5050 order_state.
- NavTONode handler: Designed for sending goals to the robot navigation stack.
- VDA Action handler: Designed for handling requests to execute specific actions (localize, lift a load, etc).
How to use it
The package is also a library package; it exports the headers and binary files to create and assemble a specific adapter. To create your own adapter package, add this package as a dependency and define the different plugin handlers for your robot. You can also customize the adapter core functionalities if desired.
To do this this, you can check the vda5050_examples repository, where you will find examples of adapter packages, for python and C++, as well as docker scripts to quickly start testing them.
Dependencies
- ROS2 - ament_cmake: The package is based on ROS2, and uses
ament_cmake. - vda5050_msgs: ROS2 messages for the VDA5050 standard (version 2.0).
- pluginlib: The adapter uses plugins to load the different handlers.
-
python3-paho-mqtt: The
mqtt_bridgeuses thepaho-mqttlibrary as the mqtt client.
Compilation
Download vda5050_msgs package into your ROS2 workspace
cd ~/dev_ws/ &&
git clone --branch ros2-vda5050-v2 https://github.com/ipa320/vda5050_msgs.git \
&& mv vda5050_msgs/vda5050_msgs ./src/vda5050_msgs \
&& mv vda5050_msgs/vda5050_serializer ./src/vda5050_serializer \
&& rm -rf vda5050_msgs
Then download this package into the ROS2 workspace src folder and compile it using colcon build.
Testing
The package provides several lint test (ament_pep257 and ament_flake8 for Python, ament_clang_format for C++ and ament_copyright), as well as specific unit tests to check the correct functionality of the different modules. To run the tests, execute:
colcon test --packages-select vda5050_connector && colcon test-result --verbose
Contributing
Please see the CONTRIBUTING document.
License
![]()
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from ros_amr_interop repomassrobotics_amr_sender vda5050_connector vda5050_msgs vda5050_serializer |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD Clause 3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/inorbit-ai/ros_amr_interop.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-11-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Leandro Pineda
Authors
- John Alejandro Duarte Carrasco
- Leandro Pineda
VDA5050 Connector
A ROS2 package which implements a connector for VDA5050, a standardized interface for communication between fleets of AGVs/AMRs and a central Master Control.
Overview
The package names itself Connector, since it can be thought as a bridge between a VDA5050 Master Control (MC) and the ROS2 robot API.
The connector is composed of three main parts (ROS2 nodes):
- MQTT_bridge: Communicates the VDA5050 <> ROS2 topics, translating VDA5050 messages into ROS2 vda5050_msgs and vice versa.
- Controller: Processes the VDA5050 robot execution as per standard specification. It validates, executes, or rejects orders and instant actions, as well as assembles feedback information to the MC.
- Adapter: Provides the interaction between the controller and the Robot API. The adapter is the one who knows how to send a navigation goal request, execute an action or retrieve specific information robot such as battery or odometry.
The way the adapter knows how to execute the different operations requested by the controller is using ROS2 plugins (components). The current project provides three plugin template interfaces, called handlers, which cover the main communication paths:
- State handler: Designed for updating robot specific information on the VDA5050 order_state.
- NavTONode handler: Designed for sending goals to the robot navigation stack.
- VDA Action handler: Designed for handling requests to execute specific actions (localize, lift a load, etc).
How to use it
The package is also a library package; it exports the headers and binary files to create and assemble a specific adapter. To create your own adapter package, add this package as a dependency and define the different plugin handlers for your robot. You can also customize the adapter core functionalities if desired.
To do this this, you can check the vda5050_examples repository, where you will find examples of adapter packages, for python and C++, as well as docker scripts to quickly start testing them.
Dependencies
- ROS2 - ament_cmake: The package is based on ROS2, and uses
ament_cmake. - vda5050_msgs: ROS2 messages for the VDA5050 standard (version 2.0).
- pluginlib: The adapter uses plugins to load the different handlers.
-
python3-paho-mqtt: The
mqtt_bridgeuses thepaho-mqttlibrary as the mqtt client.
Compilation
Download vda5050_msgs package into your ROS2 workspace
cd ~/dev_ws/ &&
git clone --branch ros2-vda5050-v2 https://github.com/ipa320/vda5050_msgs.git \
&& mv vda5050_msgs/vda5050_msgs ./src/vda5050_msgs \
&& mv vda5050_msgs/vda5050_serializer ./src/vda5050_serializer \
&& rm -rf vda5050_msgs
Then download this package into the ROS2 workspace src folder and compile it using colcon build.
Testing
The package provides several lint test (ament_pep257 and ament_flake8 for Python, ament_clang_format for C++ and ament_copyright), as well as specific unit tests to check the correct functionality of the different modules. To run the tests, execute:
colcon test --packages-select vda5050_connector && colcon test-result --verbose
Contributing
Please see the CONTRIBUTING document.
License
![]()
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from ros_amr_interop repomassrobotics_amr_sender vda5050_connector vda5050_msgs vda5050_serializer |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD Clause 3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/inorbit-ai/ros_amr_interop.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-11-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Leandro Pineda
Authors
- John Alejandro Duarte Carrasco
- Leandro Pineda
VDA5050 Connector
A ROS2 package which implements a connector for VDA5050, a standardized interface for communication between fleets of AGVs/AMRs and a central Master Control.
Overview
The package names itself Connector, since it can be thought as a bridge between a VDA5050 Master Control (MC) and the ROS2 robot API.
The connector is composed of three main parts (ROS2 nodes):
- MQTT_bridge: Communicates the VDA5050 <> ROS2 topics, translating VDA5050 messages into ROS2 vda5050_msgs and vice versa.
- Controller: Processes the VDA5050 robot execution as per standard specification. It validates, executes, or rejects orders and instant actions, as well as assembles feedback information to the MC.
- Adapter: Provides the interaction between the controller and the Robot API. The adapter is the one who knows how to send a navigation goal request, execute an action or retrieve specific information robot such as battery or odometry.
The way the adapter knows how to execute the different operations requested by the controller is using ROS2 plugins (components). The current project provides three plugin template interfaces, called handlers, which cover the main communication paths:
- State handler: Designed for updating robot specific information on the VDA5050 order_state.
- NavTONode handler: Designed for sending goals to the robot navigation stack.
- VDA Action handler: Designed for handling requests to execute specific actions (localize, lift a load, etc).
How to use it
The package is also a library package; it exports the headers and binary files to create and assemble a specific adapter. To create your own adapter package, add this package as a dependency and define the different plugin handlers for your robot. You can also customize the adapter core functionalities if desired.
To do this this, you can check the vda5050_examples repository, where you will find examples of adapter packages, for python and C++, as well as docker scripts to quickly start testing them.
Dependencies
- ROS2 - ament_cmake: The package is based on ROS2, and uses
ament_cmake. - vda5050_msgs: ROS2 messages for the VDA5050 standard (version 2.0).
- pluginlib: The adapter uses plugins to load the different handlers.
-
python3-paho-mqtt: The
mqtt_bridgeuses thepaho-mqttlibrary as the mqtt client.
Compilation
Download vda5050_msgs package into your ROS2 workspace
cd ~/dev_ws/ &&
git clone --branch ros2-vda5050-v2 https://github.com/ipa320/vda5050_msgs.git \
&& mv vda5050_msgs/vda5050_msgs ./src/vda5050_msgs \
&& mv vda5050_msgs/vda5050_serializer ./src/vda5050_serializer \
&& rm -rf vda5050_msgs
Then download this package into the ROS2 workspace src folder and compile it using colcon build.
Testing
The package provides several lint test (ament_pep257 and ament_flake8 for Python, ament_clang_format for C++ and ament_copyright), as well as specific unit tests to check the correct functionality of the different modules. To run the tests, execute:
colcon test --packages-select vda5050_connector && colcon test-result --verbose
Contributing
Please see the CONTRIBUTING document.
License
![]()
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from ros_amr_interop repomassrobotics_amr_sender vda5050_connector vda5050_msgs vda5050_serializer |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD Clause 3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/inorbit-ai/ros_amr_interop.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-11-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Leandro Pineda
Authors
- John Alejandro Duarte Carrasco
- Leandro Pineda
VDA5050 Connector
A ROS2 package which implements a connector for VDA5050, a standardized interface for communication between fleets of AGVs/AMRs and a central Master Control.
Overview
The package names itself Connector, since it can be thought as a bridge between a VDA5050 Master Control (MC) and the ROS2 robot API.
The connector is composed of three main parts (ROS2 nodes):
- MQTT_bridge: Communicates the VDA5050 <> ROS2 topics, translating VDA5050 messages into ROS2 vda5050_msgs and vice versa.
- Controller: Processes the VDA5050 robot execution as per standard specification. It validates, executes, or rejects orders and instant actions, as well as assembles feedback information to the MC.
- Adapter: Provides the interaction between the controller and the Robot API. The adapter is the one who knows how to send a navigation goal request, execute an action or retrieve specific information robot such as battery or odometry.
The way the adapter knows how to execute the different operations requested by the controller is using ROS2 plugins (components). The current project provides three plugin template interfaces, called handlers, which cover the main communication paths:
- State handler: Designed for updating robot specific information on the VDA5050 order_state.
- NavTONode handler: Designed for sending goals to the robot navigation stack.
- VDA Action handler: Designed for handling requests to execute specific actions (localize, lift a load, etc).
How to use it
The package is also a library package; it exports the headers and binary files to create and assemble a specific adapter. To create your own adapter package, add this package as a dependency and define the different plugin handlers for your robot. You can also customize the adapter core functionalities if desired.
To do this this, you can check the vda5050_examples repository, where you will find examples of adapter packages, for python and C++, as well as docker scripts to quickly start testing them.
Dependencies
- ROS2 - ament_cmake: The package is based on ROS2, and uses
ament_cmake. - vda5050_msgs: ROS2 messages for the VDA5050 standard (version 2.0).
- pluginlib: The adapter uses plugins to load the different handlers.
-
python3-paho-mqtt: The
mqtt_bridgeuses thepaho-mqttlibrary as the mqtt client.
Compilation
Download vda5050_msgs package into your ROS2 workspace
cd ~/dev_ws/ &&
git clone --branch ros2-vda5050-v2 https://github.com/ipa320/vda5050_msgs.git \
&& mv vda5050_msgs/vda5050_msgs ./src/vda5050_msgs \
&& mv vda5050_msgs/vda5050_serializer ./src/vda5050_serializer \
&& rm -rf vda5050_msgs
Then download this package into the ROS2 workspace src folder and compile it using colcon build.
Testing
The package provides several lint test (ament_pep257 and ament_flake8 for Python, ament_clang_format for C++ and ament_copyright), as well as specific unit tests to check the correct functionality of the different modules. To run the tests, execute:
colcon test --packages-select vda5050_connector && colcon test-result --verbose
Contributing
Please see the CONTRIBUTING document.
License
![]()
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from vda5050_connector repovda5050_connector |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-fml/ros_vda5050_connector.git |
| VCS Type | git |
| VCS Version | current_ros_melodic |
| Last Updated | 2022-12-20 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- TUM fml
Authors
- Florian Rothmeyer
- Florian Spiegel
How to Use the VDA-5050-Connector
Aim of the Repository
The idea of the repository is to ensure an easy connection of the VDA 5050 with ROS. It is intended to ensure an immediate integration into ROS. For ease of use, you can customize all interfaces by adapting the configuration files in the /config folder to match your requirements.
The VDA5050 connector only covers ROS communication, which means that all messages coming from the main control must be published to ROS topics. Since MQTT is widely used to communicate from the main control to AGVs, an example implementation to achieve compatibility between ROS and MQTT is shown below.

Prerequisites
- This project was tested under Ubuntu 18.04 LTS + ROS Melodic (Python 2.7) and Ubuntu 20.04 LTS + ROS Noetic (Python 3.7).
- ROS must be installed and a workspace (e.g.,
catkin_ws) must be initialized.
Since the VDA5050 connector solely relies on ROS communication, any other communication protocol must be translated accordingly. VDA5050 specifies the use of MQTT as it is widely used for communication between the main control and AGVs. In the following we will describe a method for translating MQTT messages to ROS messages. For this, we use the ROS MQTT bridge to connect to a server via TLS. Of course, any other solution can be used as well. Names of outgoing and incoming topics can be adapted accordingly.
Installation of the ROS MQTT bridge
Clone the mqtt_bridge repository and install the additional requirements to run the bridge (see https://github.com/groove-x/mqtt_bridge#prerequisites).
git clone https://github.com/groove-x/mqtt_bridge.git
NOTE
Be careful to choose the correct branch. If you plan to use ROS melodic, checkout the branch called “python2.7”.
The master branch will only work with ROS noetic.
Installation of the VDA5050 connector
Go to your catkin workspace and cd into the src folder:
cd ./src
Clone the VDA-5050-Connector repository:
git clone https://github.com/idealworks/VDA-5050-Connector.git
Clone the vda5050_msgs repository:
git clone https://github.com/ipa320/vda5050_msgs.git
NOTE
Although thevda5050_msgsrepository provides most of the required message types, some additional message types must be defined in order to provide the full functionality of VDA5050.
Since we have not send a merge request to the vda5050_msgs repository yet, do the following after cloning the vda5050_msgs repository:
copy all .msg files in /msg of the
VDA-5050-Connectorrepository into the /msg folder of thevda5050_msgsrepositoryreplace the CmakeLists.txt in the
vda5050_msgsrepository with the one within the /msg/CmakeLists of theVDA-5050-Connectorrepository
After cloning all required repositories, build your catkin workspace.
Customization of the configuration
There are three distinct parts of the configuration that must be customized to fulfill your connection requirements.
- ROS MQTT bridge server connection (“mqtt_bridge_tls.yaml”)
- ROS MQTT bridge topic configuration (“mqtt_bridge_topics.yaml”)
- VDA5050 connector topic configuration (“vda5050_connector_topics.yaml”)
Each of them is represented by a single configuration file in the /config folder. In the following sections we will go through them step by step.
NOTE
Since we wanted to use the ROS MQTT bridge out of the box with no further customization,
all required parameters configuration files can be found in the /config folder in theVDA-5050-Connectorrepository (and not in themqtt_bridgerepository).
ROS MQTT bridge server connection
To make the ROS MQTT bridge work with TLS, complete the “mqtt_bridge_tls.yaml” configuration file in the /config folder.
TLS configuration
```text tls: ca_certs:Launch files
- launch/action_mockup.launch
- launch/order_mockup.launch
- launch/ros_mqtt_bridge.launch
-
- bridge_params
- launch/test_aws.launch
-
- bridge_params
- launch/test_local.launch
-
- bridge_params
- launch/vda5050_connector.launch
- launch/vda5050_mockup.launch
Messages
- msg/AGVPosition.msg
- msg/Action.msg
- msg/ActionParameter.msg
- msg/ActionStates.msg
- msg/BatteryState.msg
- msg/BoundingBoxReference.msg
- msg/Connection.msg
- msg/ControlPoint.msg
- msg/CurrentAction.msg
- msg/Edge.msg
- msg/EdgeState.msg
- msg/EdgeStates.msg
- msg/Error.msg
- msg/ErrorReference.msg
- msg/Errors.msg
- msg/Header.msg
- msg/Info.msg
- msg/InfoReference.msg
- msg/Information.msg
- msg/InstantActions.msg
- msg/Load.msg
- msg/LoadDimensions.msg
- msg/Loads.msg
- msg/Node.msg
- msg/NodePosition.msg
- msg/NodeState.msg
- msg/NodeStates.msg
- msg/Order.msg
- msg/OrderActions.msg
- msg/OrderInformation.msg
- msg/OrderMotion.msg
- msg/SafetyState.msg
- msg/Trajectory.msg
- msg/Velocity.msg
- msg/Visualization.msg
Services
Plugins
Recent questions tagged vda5050_connector at Robotics Stack Exchange
|
|
vda5050_connector package from vda5050_connector repovda5050_connector |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-fml/ros_vda5050_connector.git |
| VCS Type | git |
| VCS Version | current_ros_noetic |
| Last Updated | 2022-12-20 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- TUM fml
Authors
- Florian Rothmeyer
- Florian Spiegel
How to Use the VDA-5050-Connector
Aim of the Repository
The idea of the repository is to ensure an easy connection of the VDA 5050 with ROS. It is intended to ensure an immediate integration into ROS. For ease of use, you can customize all interfaces by adapting the configuration files in the /config folder to match your requirements.
The VDA5050 connector only covers ROS communication, which means that all messages coming from the main control must be published to ROS topics. Since MQTT is widely used to communicate from the main control to AGVs, an example implementation to achieve compatibility between ROS and MQTT is shown below.
Prerequisites
- This project was tested under Ubuntu 18.04 LTS + ROS Melodic (Python 2.7) and Ubuntu 20.04 LTS + ROS Noetic (Python 3.7).
- ROS must be installed and a workspace (e.g.,
catkin_ws) must be initialized.
Since the VDA5050 connector solely relies on ROS communication, any other communication protocol must be translated accordingly. VDA5050 specifies the use of MQTT as it is widely used for communication between the main control and AGVs. In the following we will describe a method for translating MQTT messages to ROS messages. For this, we use the ROS MQTT bridge to connect to a server via TLS. Of course, any other solution can be used as well. Names of outgoing and incoming topics can be adapted accordingly.
Installation of the ROS MQTT bridge
Clone the mqtt_bridge repository and install the additional requirements to run the bridge (see https://github.com/groove-x/mqtt_bridge#prerequisites).
git clone https://github.com/groove-x/mqtt_bridge.git
NOTE
Be careful to choose the correct branch. If you plan to use ROS melodic, checkout the branch called “python2.7”.
The master branch will only work with ROS noetic.
Installation of the VDA5050 connector
Go to your catkin workspace and cd into the src folder:
cd ./src
Clone the VDA-5050-Connector repository:
git clone https://github.com/idealworks/VDA-5050-Connector.git
Clone the vda5050_msgs repository:
git clone https://github.com/ipa320/vda5050_msgs.git
NOTE
Although thevda5050_msgsrepository provides most of the required message types, some additional message types must be defined in order to provide the full functionality of VDA5050.
Since we have not send a merge request to the vda5050_msgs repository yet, do the following after cloning the vda5050_msgs repository:
copy all .msg files in /msg of the
VDA-5050-Connectorrepository into the /msg folder of thevda5050_msgsrepositoryreplace the CmakeLists.txt in the
vda5050_msgsrepository with the one within the /msg/CmakeLists of theVDA-5050-Connectorrepository
After cloning all required repositories, build your catkin workspace.
Customization of the configuration
There are three distinct parts of the configuration that must be customized to fulfill your connection requirements.
- ROS MQTT bridge server connection (“mqtt_bridge_tls.yaml”)
- ROS MQTT bridge topic configuration (“mqtt_bridge_topics.yaml”)
- VDA5050 connector topic configuration (“vda5050_connector_topics.yaml”)
Each of them is represented by a single configuration file in the /config folder. In the following sections we will go through them step by step.
NOTE
Since we wanted to use the ROS MQTT bridge out of the box with no further customization,
all required parameters configuration files can be found in the /config folder in theVDA-5050-Connectorrepository (and not in themqtt_bridgerepository).
ROS MQTT bridge server connection
To make the ROS MQTT bridge work with TLS, complete the “mqtt_bridge_tls.yaml” configuration file in the /config folder.
TLS configuration
```text tls: ca_certs:Launch files
- launch/action_mockup.launch
- launch/order_mockup.launch
- launch/ros_mqtt_bridge.launch
-
- bridge_params
- launch/test_aws.launch
-
- bridge_params
- launch/test_local.launch
-
- bridge_params
- launch/vda5050_connector.launch
- launch/vda5050_mockup.launch
Messages
- msg/AGVPosition.msg
- msg/Action.msg
- msg/ActionParameter.msg
- msg/ActionStates.msg
- msg/BatteryState.msg
- msg/BoundingBoxReference.msg
- msg/Connection.msg
- msg/ControlPoint.msg
- msg/CurrentAction.msg
- msg/Edge.msg
- msg/EdgeState.msg
- msg/EdgeStates.msg
- msg/Error.msg
- msg/ErrorReference.msg
- msg/Errors.msg
- msg/Header.msg
- msg/Info.msg
- msg/InfoReference.msg
- msg/Information.msg
- msg/InstantActions.msg
- msg/Load.msg
- msg/LoadDimensions.msg
- msg/Loads.msg
- msg/Node.msg
- msg/NodePosition.msg
- msg/NodeState.msg
- msg/NodeStates.msg
- msg/Order.msg
- msg/OrderActions.msg
- msg/OrderInformation.msg
- msg/OrderMotion.msg
- msg/SafetyState.msg
- msg/Trajectory.msg
- msg/Velocity.msg
- msg/Visualization.msg