
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
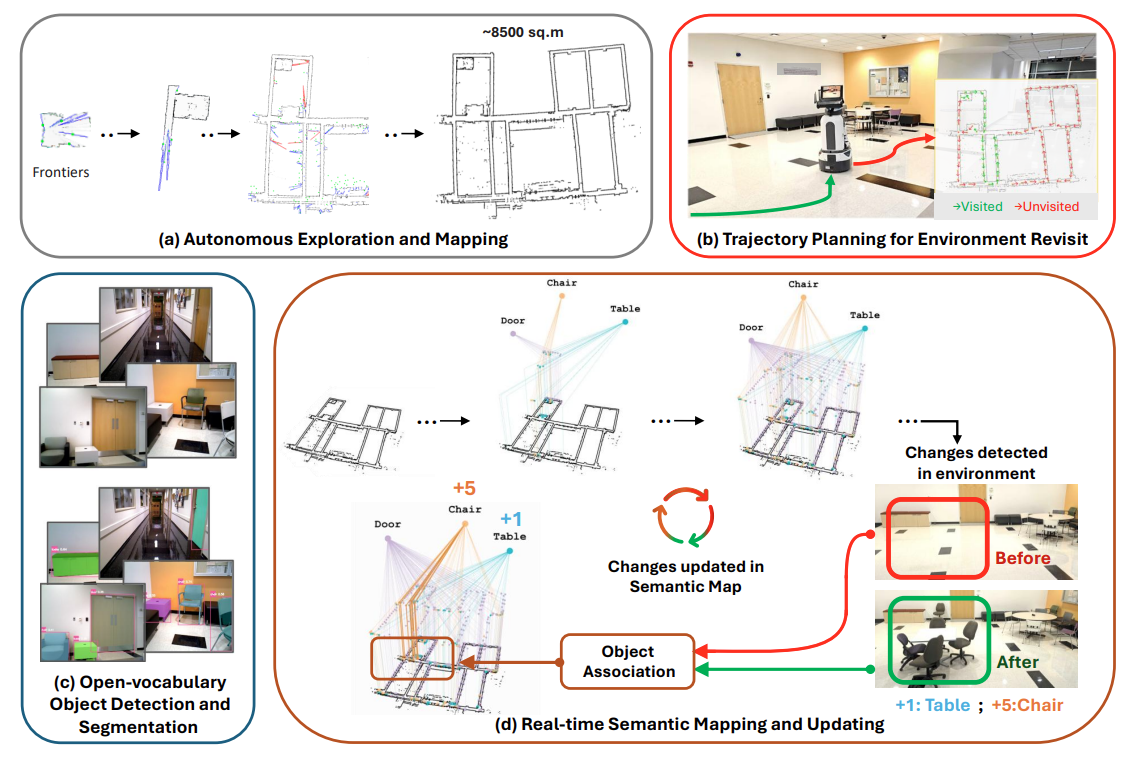
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/irvlutd/autox-semmap.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-24 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aws_robomaker_small_house_world | 1.0.0 |
| explore_lite | 2.1.4 |
| multirobot_map_merge | 2.1.4 |
| fetch_gazebo | 0.9.2 |
| fetch_gazebo_demo | 0.9.2 |
| fetch_simulation | 0.9.2 |
| fetchit_challenge | 0.9.2 |
| fetch_calibration | 0.9.1 |
| fetch_depth_layer | 0.9.1 |
| fetch_description | 0.9.1 |
| fetch_ikfast_plugin | 0.9.1 |
| fetch_maps | 0.9.1 |
| fetch_moveit_config | 0.9.1 |
| fetch_navigation | 0.9.1 |
| fetch_ros | 0.9.1 |
| fetch_teleop | 0.9.1 |
README
A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
<div align=”center””>
| arXiv ** | ** Project WebPage ** | ** Video |
</div>
Citation
Please cite this work if it helps in your research
@misc{allu2025modularroboticautonomousexploration,
title={A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments},
author={Sai Haneesh Allu and Itay Kadosh and Tyler Summers and Yu Xiang},
year={2025},
eprint={2409.15493},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.15493}
}
For any questions regarding this work, contact Sai Haneesh Allu. For any issues regarding this code, please raise an issue.
Index
- Installation
- Initialization
- Mapping and Exploration
- Environment Traversal planning
- Semantic Map Construction and Update
- Running on a real robot system
- Real World Demo
Installation
The following subsections provides detailed installation guidelines related to workspace setup, dependencies and other requirements to test this work effectively. Additionally, a docker has been provided with instructions. Credits to Iminolee .
A. Install ROS and Gazebo
This code is tested on ros noetic version. Detailed installation instructions are found here.To install ROS Noetic, execute the following commands in your terminal:
``` sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt install -y curl
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
sudo apt update
sudo apt install -y ros-noetic-desktop-full
echo “source /opt/ros/noetic/setup.bash” » ~/.bashrc
File truncated at 100 lines see the full file