
Repository Summary
| Description | This repository contains EusLisp software developed and used by JSK at The University of Tokyo |
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-02-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
README
JSK EusLisp repository 


This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’




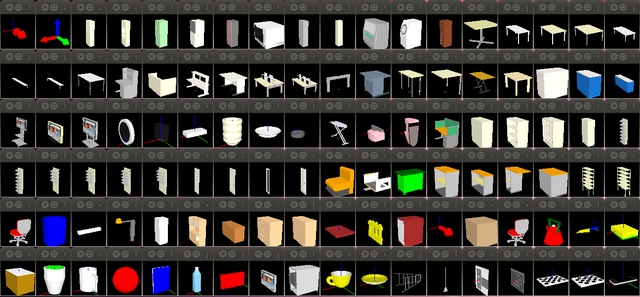
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
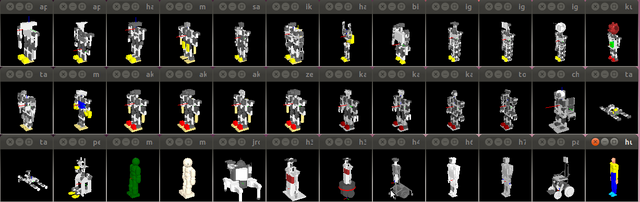
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
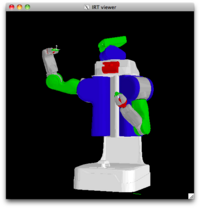
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
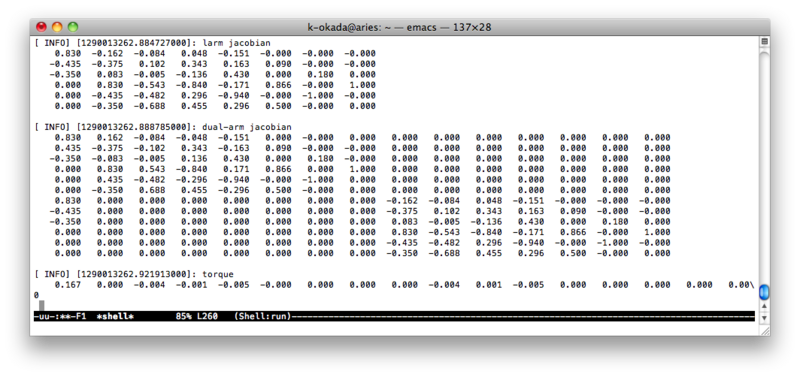
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
$ roscd pr2eus
;; read joint state and display in euslisp viewer, print jacobian
$ roslaunch ./pr2-read-state.launch
;; sample program to show how to make pr2 posture from euslisp, THIS WILL MOVE REAL ROBOT, CAUTION!!!
$ roslaunch ./pr2-send-joints.launch
You can use our script to set ROS_MASTER_URI and ROS_IP
$ source `rospack find jsk_tools`/src/bashrc.ros
$ rossetrobot pr1012.jsk.com # change to your environment
$ rossetip
Have a look at roseus package in http://github.com/jsk-ros-pkg repository for ROS client library for euslisp
3.4 Support and Trouble Shooting
Open an issue on our issue tracker if something doesn’t work as expected, or if you want new features implemented.
Use the pull requests system to send us solutions for the issues so we can implement them in this repository.
3.5 Online Documents (Currently only Japanese is available)
See online manual
PDF files are also available from here
3.6 Install euslisp from source code (EXPERTS ONLY)
3.6.1 Installing dependent libraries
For Ubuntu users:
$ sudo apt-get install git make gcc g++ libjpeg-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi gsfonts-x11 texlive-fonts-extra xfonts-100dpi-transcoded xfonts-75dpi-transcoded msttcorefonts pkg-config libbullet-dev
For Mac OSX users using Homebrew:
$ brew install jpeg libpng mesalib-glw wget bullet
’'’NOTE:’’’ EusLisp needs X11 Library, but Mac OSX mountain lion no longer supports it. Given this case, you’ll need to install XQuartz.
Also for Mac OSX lion (or older) users it’s better to install the latest XQuartz for safety and compatibility reasons.
(If XQuartz is older than 2.7.3, the installation of EusLisp will fail. You should install the latest XQuartz.)
For Raspberry Pi users using debian(Raspbian “wheezy”):
$ sudo apt-get install git gcc g++ libjpeg62-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi
## additional install for using OpenGL on raspberry pi
$ sudo apt-get install libgl1-mesa-dri xserver-xorg-video-vesa xutils
For Cygwin(only works with 32bit systems)
Packages listed below should be intalled using setup.exe.
git, gcc-core, gcc-g++, make
libjpeg-devel, libpng-devel
libGL-devel, libGLU-devel, libglut-devel, libX11-devel, libXext-devel
xorg-server
X-start-menu-icons (for startxwin.exe)
mesa-demo (for glxinfo)
bitmap fonts (all bitmap font packages -75dpi, -100dpi, -misc )
3.6.2 Downloading and building EusLisp
$ git clone http://github.com/euslisp/jskeus jskeus
$ cd jskeus
$ make
you will see instructions to add EUSDIR, ARCHDIR, PATH, LD_LIBRARY_PATH environment variable in your bashrc to invoke euslisp program
$ echo "source ~/bashrc.eus" >> ~/.bashrc
3.6.3 Install ROS and jsk-ros-pkg repository
See http://wiki.ros.org/$ROS_DISTRO/Installation/Source for more details
$ sudo apt-get install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential
$ mkdir -p ~/ros_catkin_ws/src
$ cd ~/ros_catkin_ws/src
$ wstool init src https://raw.githubusercontent.com/jsk-ros-pkg/jsk_pr2eus/master/.rosinstall
$ wget https://raw.githubusercontent.com/jsk-ros-pkg/jsk_travis/master/rosdep-install.sh
$ sh ./rosdep-install.sh
$ cd ..
$ catkin_make
$ source devel/setup.bash
3.7 Acknowledgment
Software in this repository is based on the EusLisp language.
CONTRIBUTING
Repository Summary
| Description | This repository contains EusLisp software developed and used by JSK at The University of Tokyo |
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-02-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
$ roscd pr2eus
;; read joint state and display in euslisp viewer, print jacobian
$ roslaunch ./pr2-read-state.launch
;; sample program to show how to make pr2 posture from euslisp, THIS WILL MOVE REAL ROBOT, CAUTION!!!
$ roslaunch ./pr2-send-joints.launch
You can use our script to set ROS_MASTER_URI and ROS_IP
$ source `rospack find jsk_tools`/src/bashrc.ros
$ rossetrobot pr1012.jsk.com # change to your environment
$ rossetip
Have a look at roseus package in http://github.com/jsk-ros-pkg repository for ROS client library for euslisp
3.4 Support and Trouble Shooting
Open an issue on our issue tracker if something doesn’t work as expected, or if you want new features implemented.
Use the pull requests system to send us solutions for the issues so we can implement them in this repository.
3.5 Online Documents (Currently only Japanese is available)
See online manual
PDF files are also available from here
3.6 Install euslisp from source code (EXPERTS ONLY)
3.6.1 Installing dependent libraries
For Ubuntu users:
$ sudo apt-get install git make gcc g++ libjpeg-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi gsfonts-x11 texlive-fonts-extra xfonts-100dpi-transcoded xfonts-75dpi-transcoded msttcorefonts pkg-config libbullet-dev
For Mac OSX users using Homebrew:
$ brew install jpeg libpng mesalib-glw wget bullet
’'’NOTE:’’’ EusLisp needs X11 Library, but Mac OSX mountain lion no longer supports it. Given this case, you’ll need to install XQuartz.
Also for Mac OSX lion (or older) users it’s better to install the latest XQuartz for safety and compatibility reasons.
(If XQuartz is older than 2.7.3, the installation of EusLisp will fail. You should install the latest XQuartz.)
For Raspberry Pi users using debian(Raspbian “wheezy”):
$ sudo apt-get install git gcc g++ libjpeg62-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi
## additional install for using OpenGL on raspberry pi
$ sudo apt-get install libgl1-mesa-dri xserver-xorg-video-vesa xutils
For Cygwin(only works with 32bit systems)
Packages listed below should be intalled using setup.exe.
git, gcc-core, gcc-g++, make
libjpeg-devel, libpng-devel
libGL-devel, libGLU-devel, libglut-devel, libX11-devel, libXext-devel
xorg-server
X-start-menu-icons (for startxwin.exe)
mesa-demo (for glxinfo)
bitmap fonts (all bitmap font packages -75dpi, -100dpi, -misc )
3.6.2 Downloading and building EusLisp
$ git clone http://github.com/euslisp/jskeus jskeus
$ cd jskeus
$ make
you will see instructions to add EUSDIR, ARCHDIR, PATH, LD_LIBRARY_PATH environment variable in your bashrc to invoke euslisp program
$ echo "source ~/bashrc.eus" >> ~/.bashrc
3.6.3 Install ROS and jsk-ros-pkg repository
See http://wiki.ros.org/$ROS_DISTRO/Installation/Source for more details
$ sudo apt-get install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential
$ mkdir -p ~/ros_catkin_ws/src
$ cd ~/ros_catkin_ws/src
$ wstool init src https://raw.githubusercontent.com/jsk-ros-pkg/jsk_pr2eus/master/.rosinstall
$ wget https://raw.githubusercontent.com/jsk-ros-pkg/jsk_travis/master/rosdep-install.sh
$ sh ./rosdep-install.sh
$ cd ..
$ catkin_make
$ source devel/setup.bash
3.7 Acknowledgment
Software in this repository is based on the EusLisp language.
CONTRIBUTING
Repository Summary
| Description | This repository contains EusLisp software developed and used by JSK at The University of Tokyo |
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-02-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
$ roscd pr2eus
;; read joint state and display in euslisp viewer, print jacobian
$ roslaunch ./pr2-read-state.launch
;; sample program to show how to make pr2 posture from euslisp, THIS WILL MOVE REAL ROBOT, CAUTION!!!
$ roslaunch ./pr2-send-joints.launch
You can use our script to set ROS_MASTER_URI and ROS_IP
$ source `rospack find jsk_tools`/src/bashrc.ros
$ rossetrobot pr1012.jsk.com # change to your environment
$ rossetip
Have a look at roseus package in http://github.com/jsk-ros-pkg repository for ROS client library for euslisp
3.4 Support and Trouble Shooting
Open an issue on our issue tracker if something doesn’t work as expected, or if you want new features implemented.
Use the pull requests system to send us solutions for the issues so we can implement them in this repository.
3.5 Online Documents (Currently only Japanese is available)
See online manual
PDF files are also available from here
3.6 Install euslisp from source code (EXPERTS ONLY)
3.6.1 Installing dependent libraries
For Ubuntu users:
$ sudo apt-get install git make gcc g++ libjpeg-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi gsfonts-x11 texlive-fonts-extra xfonts-100dpi-transcoded xfonts-75dpi-transcoded msttcorefonts pkg-config libbullet-dev
For Mac OSX users using Homebrew:
$ brew install jpeg libpng mesalib-glw wget bullet
’'’NOTE:’’’ EusLisp needs X11 Library, but Mac OSX mountain lion no longer supports it. Given this case, you’ll need to install XQuartz.
Also for Mac OSX lion (or older) users it’s better to install the latest XQuartz for safety and compatibility reasons.
(If XQuartz is older than 2.7.3, the installation of EusLisp will fail. You should install the latest XQuartz.)
For Raspberry Pi users using debian(Raspbian “wheezy”):
$ sudo apt-get install git gcc g++ libjpeg62-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi
## additional install for using OpenGL on raspberry pi
$ sudo apt-get install libgl1-mesa-dri xserver-xorg-video-vesa xutils
For Cygwin(only works with 32bit systems)
Packages listed below should be intalled using setup.exe.
git, gcc-core, gcc-g++, make
libjpeg-devel, libpng-devel
libGL-devel, libGLU-devel, libglut-devel, libX11-devel, libXext-devel
xorg-server
X-start-menu-icons (for startxwin.exe)
mesa-demo (for glxinfo)
bitmap fonts (all bitmap font packages -75dpi, -100dpi, -misc )
3.6.2 Downloading and building EusLisp
$ git clone http://github.com/euslisp/jskeus jskeus
$ cd jskeus
$ make
you will see instructions to add EUSDIR, ARCHDIR, PATH, LD_LIBRARY_PATH environment variable in your bashrc to invoke euslisp program
$ echo "source ~/bashrc.eus" >> ~/.bashrc
3.6.3 Install ROS and jsk-ros-pkg repository
See http://wiki.ros.org/$ROS_DISTRO/Installation/Source for more details
$ sudo apt-get install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential
$ mkdir -p ~/ros_catkin_ws/src
$ cd ~/ros_catkin_ws/src
$ wstool init src https://raw.githubusercontent.com/jsk-ros-pkg/jsk_pr2eus/master/.rosinstall
$ wget https://raw.githubusercontent.com/jsk-ros-pkg/jsk_travis/master/rosdep-install.sh
$ sh ./rosdep-install.sh
$ cd ..
$ catkin_make
$ source devel/setup.bash
3.7 Acknowledgment
Software in this repository is based on the EusLisp language.
CONTRIBUTING
Repository Summary
| Description | This repository contains EusLisp software developed and used by JSK at The University of Tokyo |
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-02-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
$ roscd pr2eus
;; read joint state and display in euslisp viewer, print jacobian
$ roslaunch ./pr2-read-state.launch
;; sample program to show how to make pr2 posture from euslisp, THIS WILL MOVE REAL ROBOT, CAUTION!!!
$ roslaunch ./pr2-send-joints.launch
You can use our script to set ROS_MASTER_URI and ROS_IP
$ source `rospack find jsk_tools`/src/bashrc.ros
$ rossetrobot pr1012.jsk.com # change to your environment
$ rossetip
Have a look at roseus package in http://github.com/jsk-ros-pkg repository for ROS client library for euslisp
3.4 Support and Trouble Shooting
Open an issue on our issue tracker if something doesn’t work as expected, or if you want new features implemented.
Use the pull requests system to send us solutions for the issues so we can implement them in this repository.
3.5 Online Documents (Currently only Japanese is available)
See online manual
PDF files are also available from here
3.6 Install euslisp from source code (EXPERTS ONLY)
3.6.1 Installing dependent libraries
For Ubuntu users:
$ sudo apt-get install git make gcc g++ libjpeg-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi gsfonts-x11 texlive-fonts-extra xfonts-100dpi-transcoded xfonts-75dpi-transcoded msttcorefonts pkg-config libbullet-dev
For Mac OSX users using Homebrew:
$ brew install jpeg libpng mesalib-glw wget bullet
’'’NOTE:’’’ EusLisp needs X11 Library, but Mac OSX mountain lion no longer supports it. Given this case, you’ll need to install XQuartz.
Also for Mac OSX lion (or older) users it’s better to install the latest XQuartz for safety and compatibility reasons.
(If XQuartz is older than 2.7.3, the installation of EusLisp will fail. You should install the latest XQuartz.)
For Raspberry Pi users using debian(Raspbian “wheezy”):
$ sudo apt-get install git gcc g++ libjpeg62-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev xfonts-100dpi xfonts-75dpi
## additional install for using OpenGL on raspberry pi
$ sudo apt-get install libgl1-mesa-dri xserver-xorg-video-vesa xutils
For Cygwin(only works with 32bit systems)
Packages listed below should be intalled using setup.exe.
git, gcc-core, gcc-g++, make
libjpeg-devel, libpng-devel
libGL-devel, libGLU-devel, libglut-devel, libX11-devel, libXext-devel
xorg-server
X-start-menu-icons (for startxwin.exe)
mesa-demo (for glxinfo)
bitmap fonts (all bitmap font packages -75dpi, -100dpi, -misc )
3.6.2 Downloading and building EusLisp
$ git clone http://github.com/euslisp/jskeus jskeus
$ cd jskeus
$ make
you will see instructions to add EUSDIR, ARCHDIR, PATH, LD_LIBRARY_PATH environment variable in your bashrc to invoke euslisp program
$ echo "source ~/bashrc.eus" >> ~/.bashrc
3.6.3 Install ROS and jsk-ros-pkg repository
See http://wiki.ros.org/$ROS_DISTRO/Installation/Source for more details
$ sudo apt-get install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential
$ mkdir -p ~/ros_catkin_ws/src
$ cd ~/ros_catkin_ws/src
$ wstool init src https://raw.githubusercontent.com/jsk-ros-pkg/jsk_pr2eus/master/.rosinstall
$ wget https://raw.githubusercontent.com/jsk-ros-pkg/jsk_travis/master/rosdep-install.sh
$ sh ./rosdep-install.sh
$ cd ..
$ catkin_make
$ source devel/setup.bash
3.7 Acknowledgment
Software in this repository is based on the EusLisp language.