
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
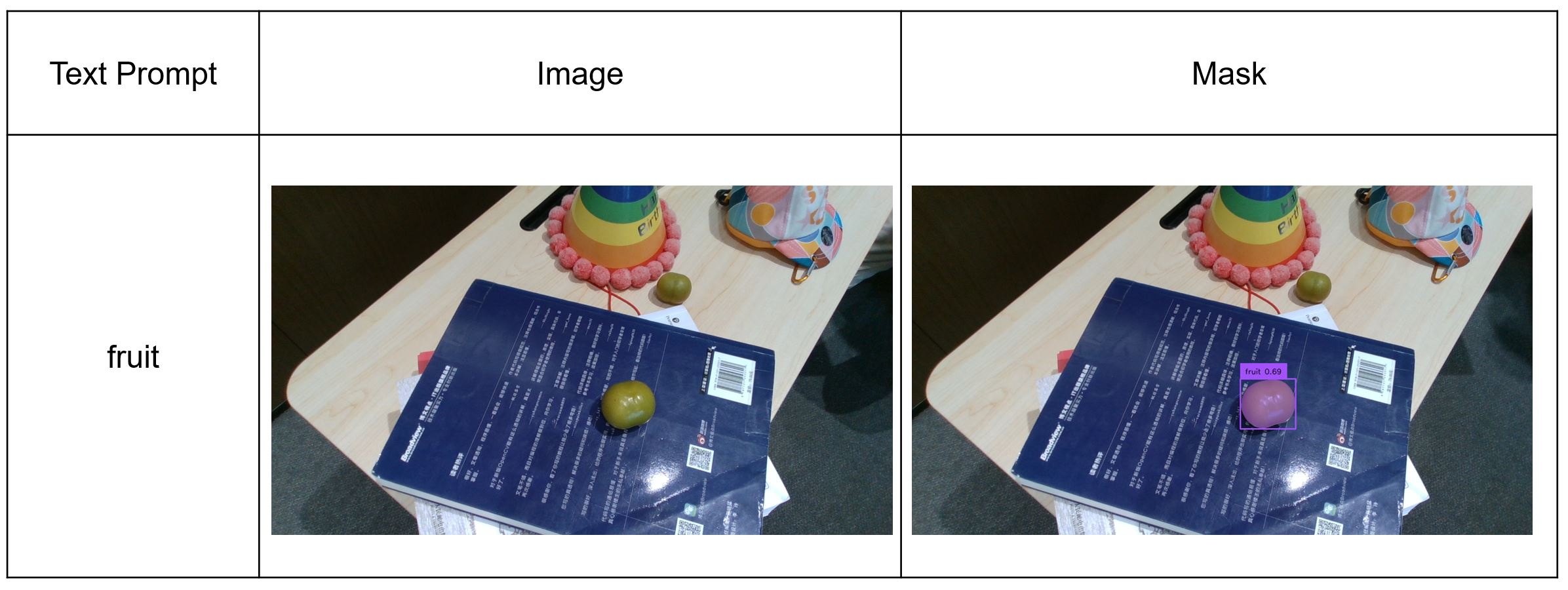
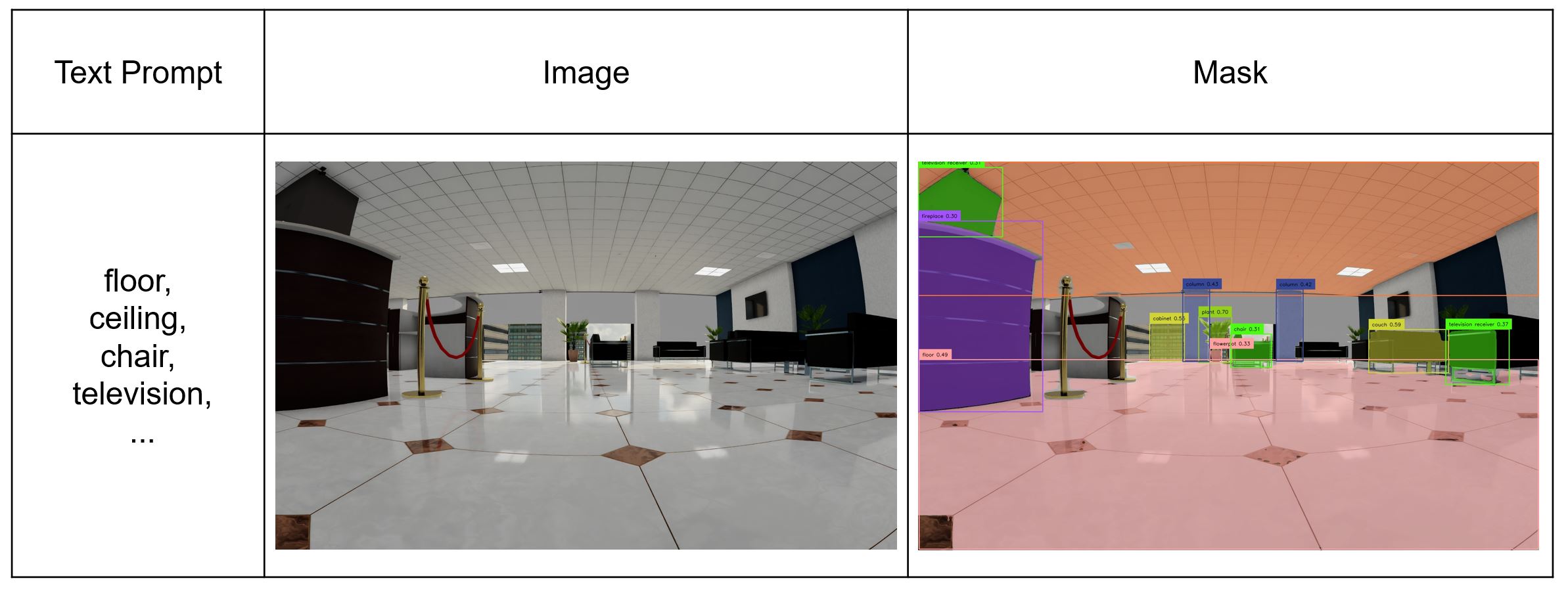
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged airship_perception at Robotics Stack Exchange
|
|
airship_perception package from airship repoairship_chat airship_description airship_grasp airship_interface airship_localization airship_navigation airship_object airship_perception airship_planner |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/airs-cuhk/airship.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-07-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- airsbot2
Authors
airship_perception
This project combines open-vocabulary object detection and semantic segmentation to achieve open-vocabulary object segmentation. The project uses Grounding DINO and SAM to achieve the segmentation of specified objects.
-
Grasping demo
-
Mapping demo
airship_perception API Overview
airship_perception_node
- Service
-
airship_perception/SegmentationGrasping: Provides a service to provide grasping node with a mask for specified objects. -
airship_perception/SegmentationMapping: Provides a service to provide mapping node with the mask of the specified object.
-
lib/grounded_sam_api
- Parameters
-
grounding_dino_model: groundingdino model. (Default:none) -
sam_predictor: sam model. (Default:none) -
image: input image. (Default:none) -
classes: objects. (Default:none) -
box_threshold: box threshold. (Default:0.3) -
text_threshold: text threshold. (Default:0.25) -
nms_threshold: nms threshold. (Default:0.8) -
action: grasp or map. (Default:None)
-
To Do List
- Improve object segmentation algorithms and enhance segmentation efficiency.
- Deploy the model in the cloud and build the cloud-edge data transmission architecture.
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |