
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
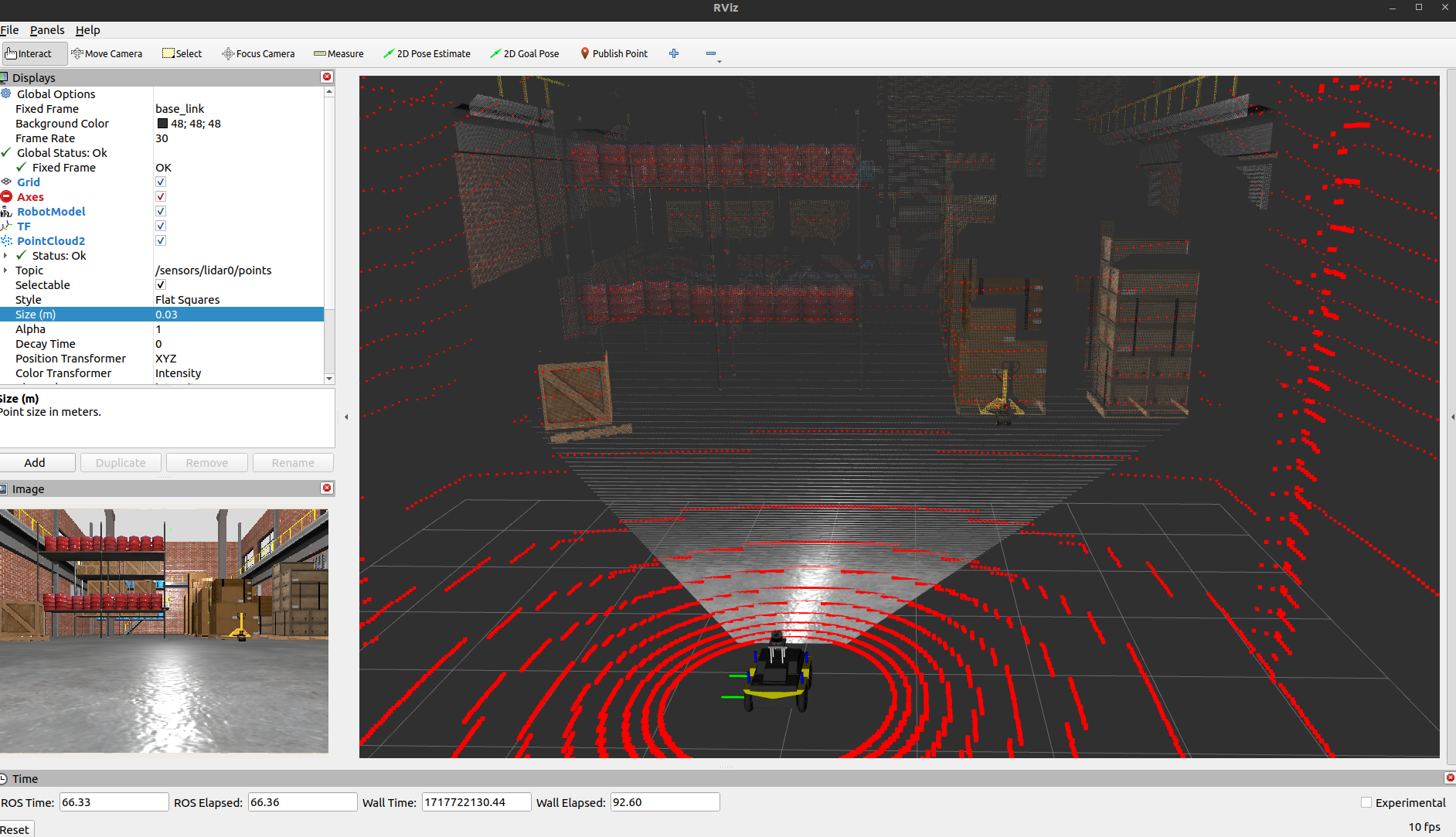
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged honeybee_gazebo at Robotics Stack Exchange
|
|
honeybee_gazebo package from opennav_amd_demonstrations repohoneybee_bringup honeybee_demos honeybee_description honeybee_gazebo honeybee_nav2 honeybee_watchdogs |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Project containing demonstrations using AMD's Ryzen AI and other technologies with ROS 2 |
| Checkout URI | https://github.com/open-navigation/opennav_amd_demonstrations.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-08-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Steve Macenski
Authors
Honeybee Gazebo
This contains a modern Gazebo simulation for the honeybee robot to launch instead of the hardware for desktop testing. It launches automatically with the bringup package with the command use_simulator:=true and mimicks the same topics provided by the hardware for a 1:1 replication.
To launch standalone without the bringup package, please use the command use_joint_state_publisher:=true to launch the robot’s description that is otherwise handled in the bringup’s robot.launch.py when launching the fully system. The system should be able to be visualized in the base_link frame (since default simulation without robot bringup will lack odometry system).
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| honeybee_description | |
| ros_gz_bridge | |
| ros_gz_image | |
| ros_gz_interfaces | |
| ros_gz_sim | |
| robot_state_publisher | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| honeybee_bringup |