
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
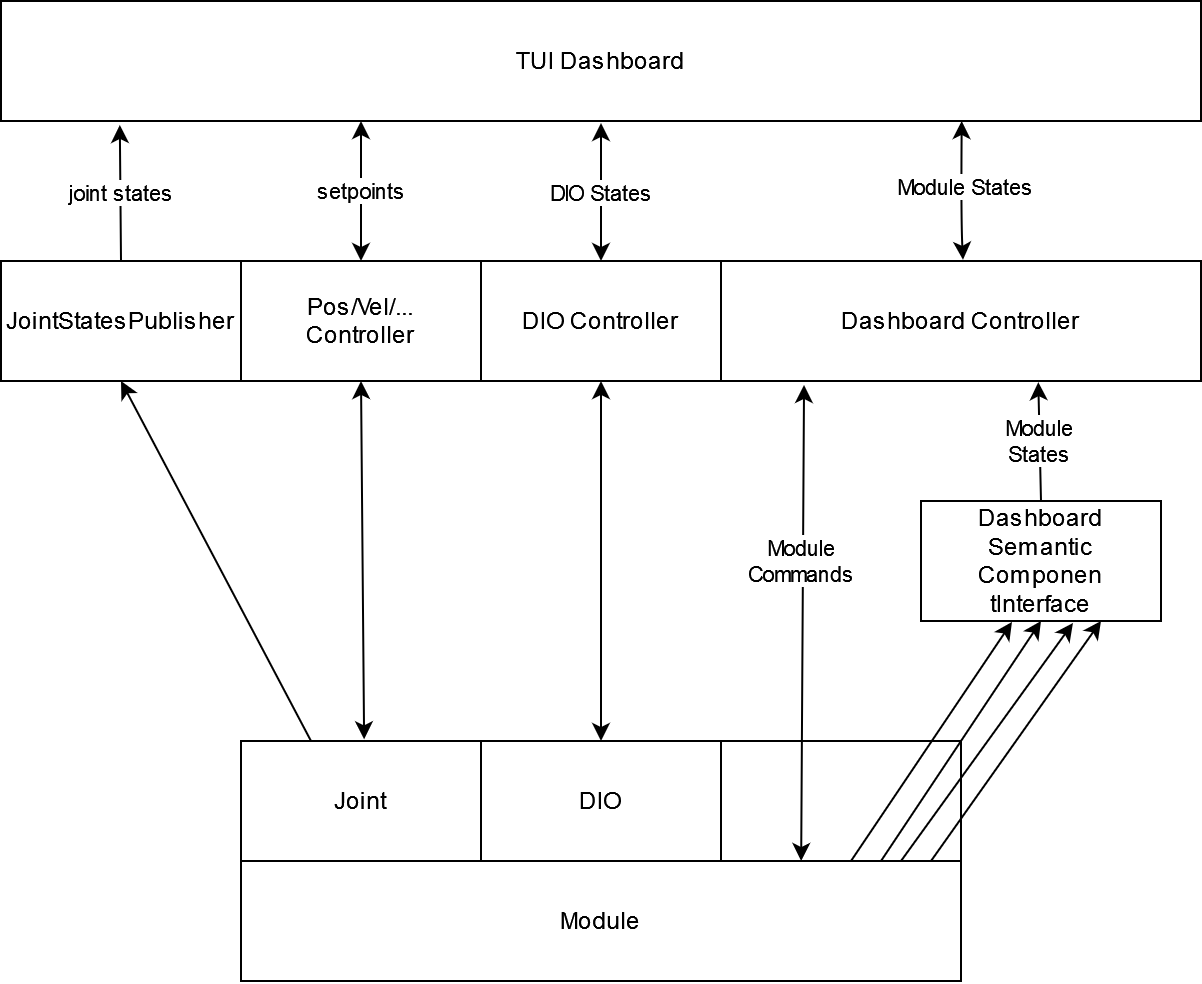
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
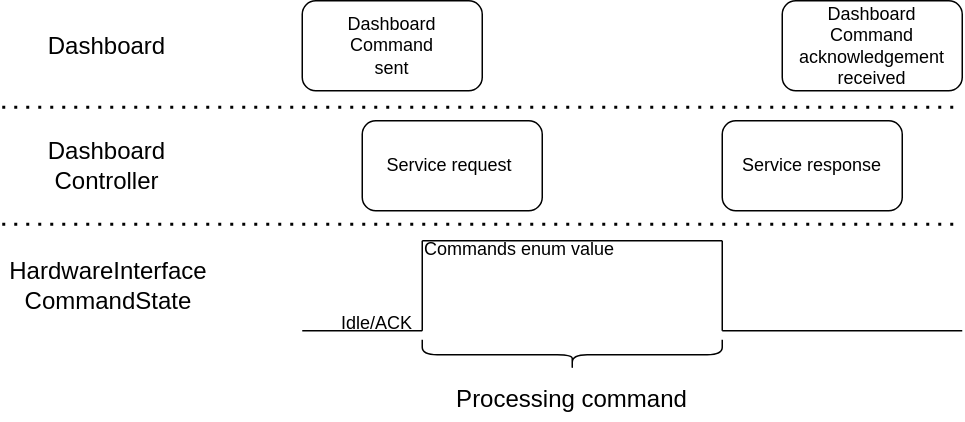
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_dashboard at Robotics Stack Exchange
|
|
irc_ros_dashboard package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Dashboard
This project contains a barebone dashboard with a text user interface. It is mostly intended for debugging purposes. Once the interfaces work and all desired functionality is achievable it may be superseded by a nicer RQt/Rviz plugin/Web interface.
The ROS+TUI idea was inspired by RTUI.
Usage
Requires textual.
Define which modules to plot in the controllers .yaml configuration. The dashboard will then connect to the corrosponding controller interfaces and show the data in a table. In the future it will be possible to also send commands from there and showing more in-depth information, this is currently work in progress.
Structure
Information is provided by DashboardController, DioController, JointStates and standard ros2_control controllers:
Dashboard commands
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| irc_ros_msgs |
System Dependencies
| Name |
|---|
| python3-pytest |