
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
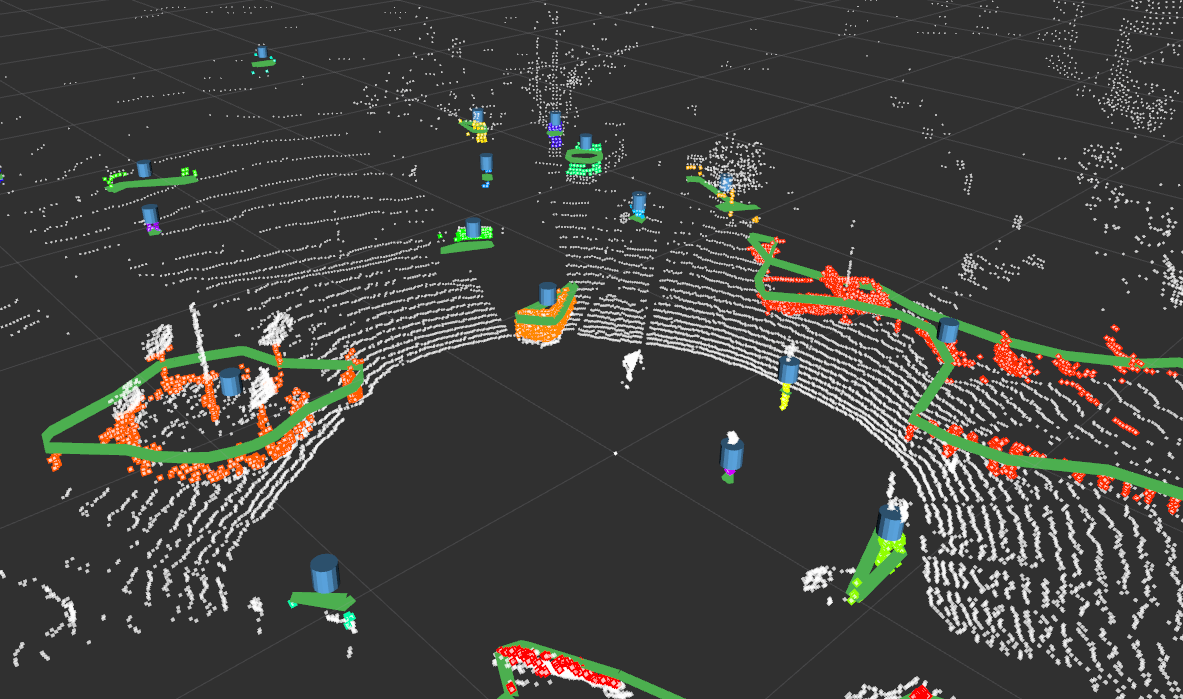
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lidar_cluster at Robotics Stack Exchange
|
|
lidar_cluster package from lidar_cluster_ros2 repolidar_cluster |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/jkk-research/lidar_cluster_ros2.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-01-08 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- he
Authors
lidar_cluster ROS 2 package
LIDAR pointcloud clustering in ROS 2 Humble
Build this ROS 2 package
In the following ~/ros2_ws is assumed as the ROS 2 workspace:
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
cd ~/ros2_ws
Build either with:
colcon build --packages-select lidar_cluster --symlink-install
or with optimized build:
MAKEFLAGS="-j4" colcon build --packages-select lidar_cluster --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
[!TIP] There is a detailded decription how to make this package work with ground segmentation: jkk-research.github.io/workshops/clustering_a
ROS 2 graph
graph LR;
p[ /input_points<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
tf[ /tf <br/>optional topic]:::dash -.-> cluster
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Cluster nodes
| Node | Clustering | Implementation | Description | Additional Resources |
|---|---|---|---|---|
dbscan_spatial |
DBSCAN | spatial | DBSCAN non-grid implementation | |
dbscan_grid |
DBSAN | grid | DBSCAN voxel-grid-based implementation | |
dblane_spatial |
DBlane | spatial | DBlane non-grid implementation | flowchart, notebooks |
dblane_f1s |
DBlane | formula | DBlane formula 1 student implementation | notebooks |
euclidean_spatial |
Euclidean | spatial | PCL implementation of Euclidean clustering non-grid implementation | PCL docs |
euclidean_grid |
Euclidean | grid | PCL implementation of Euclidean clustering voxel-grid-based implementation | PCL docs |
Don't forget to source before ROS commands.
``` bash source ~/ros2_ws/install/setup.bash ```ros2 run lidar_cluster dblane_spatial
ros2 launch lidar_cluster dblane_spatial.launch.py
ros2 launch lidar_cluster dblane_f1s.launch.py topic:=/input_points
Remarks
In VS code it is advised to add the following to include path:
${workspaceFolder}/**
/opt/ros/humble/include/**
/usr/include/pcl-1.12/**
/usr/include/eigen3/**
If you are not sure where your header files are use e.g.:
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| libpcl-all-dev |