
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
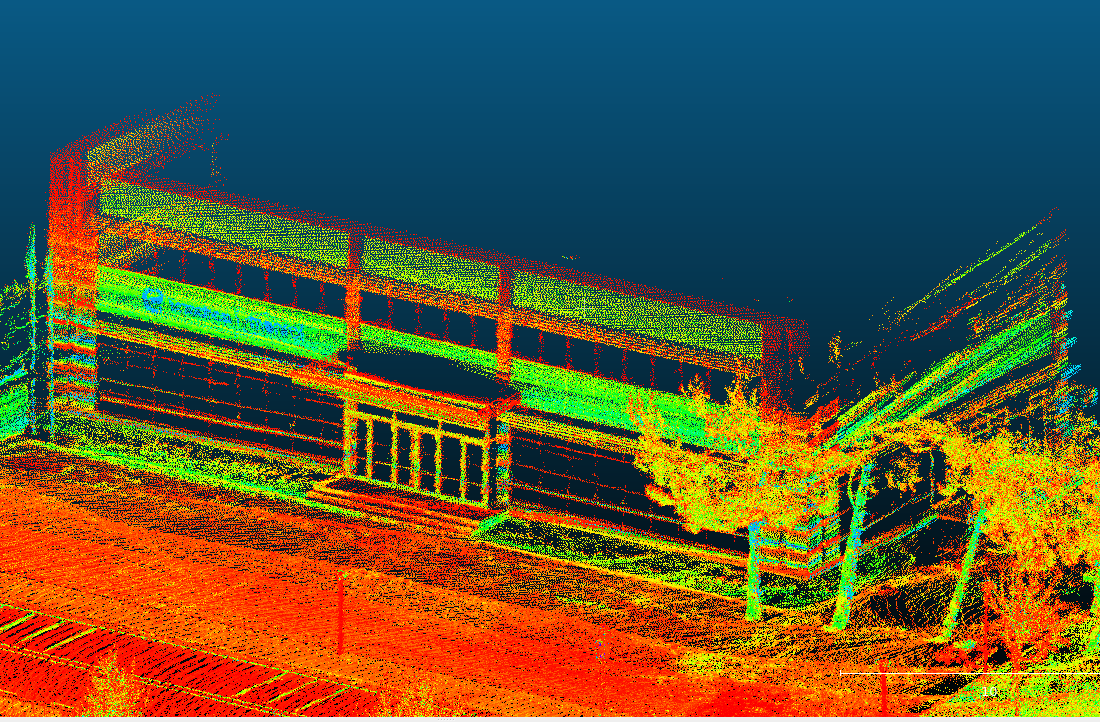
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
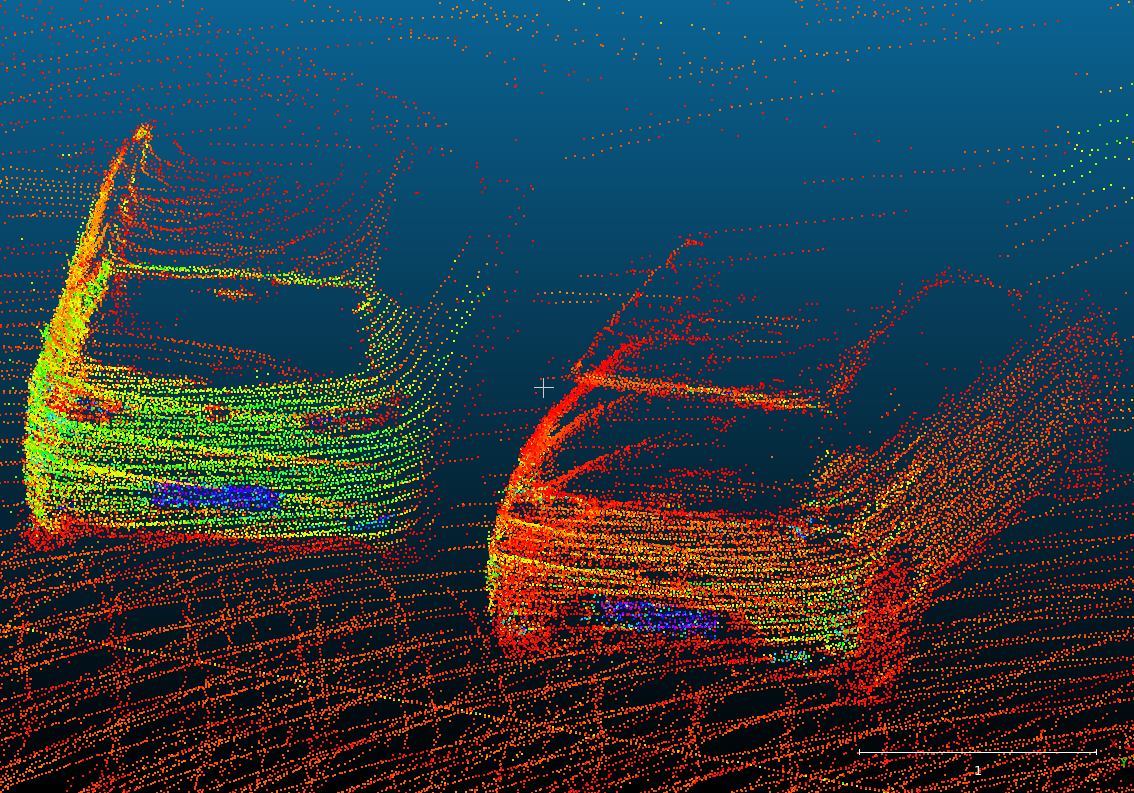
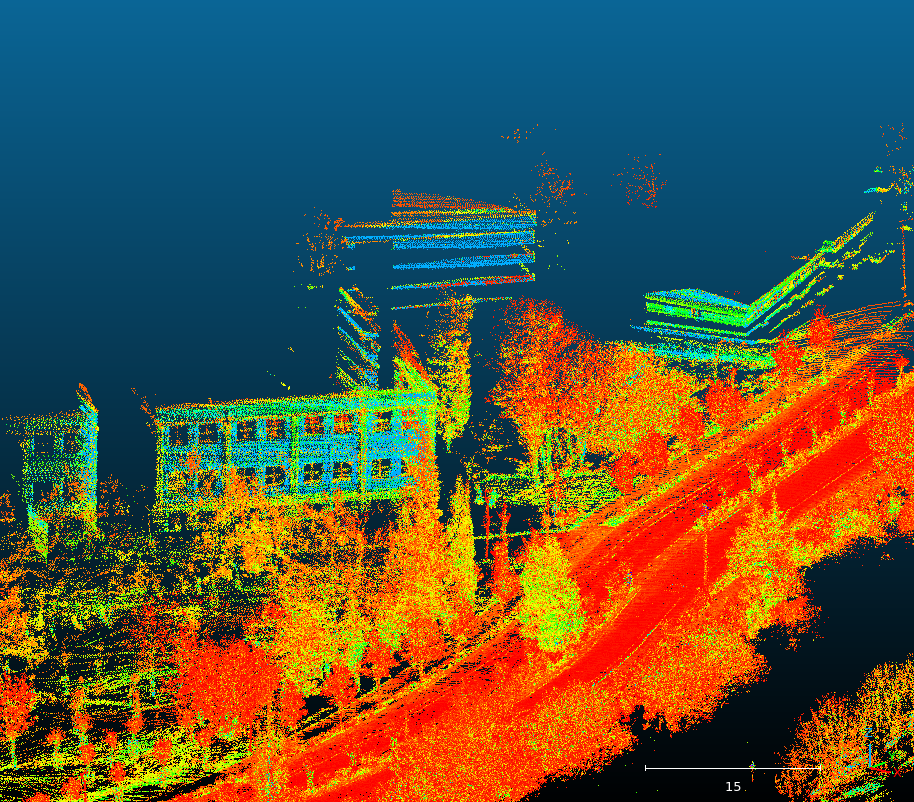
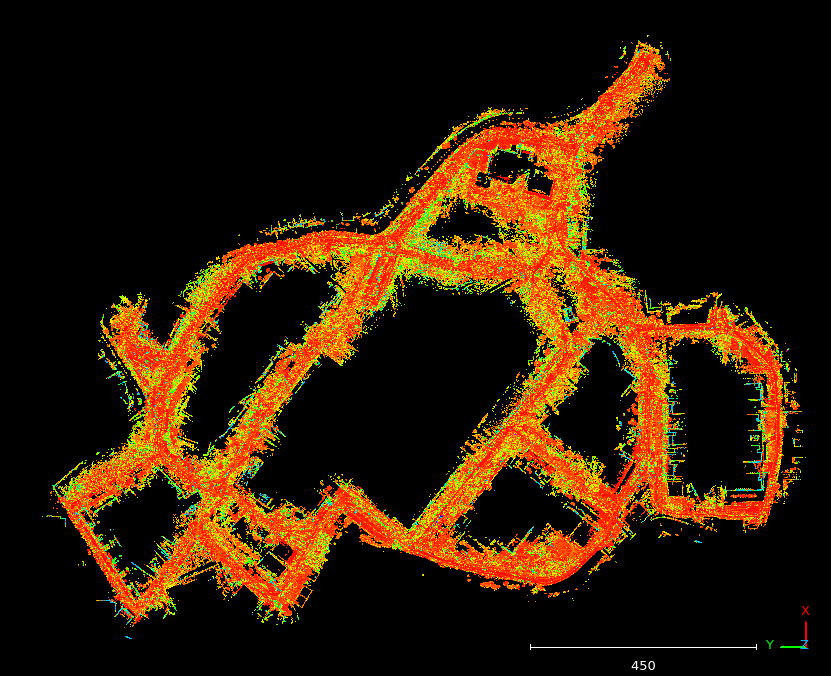
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged mapora at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/mapora.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-13 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- ataparlar
Authors
Mapora
Mapora is an open-source georeferenced point cloud generating tool. Basic idea is putting each individual point cloud onto the pose which are matched with time in nanosecond precision.
Additionally, Mapora has a rosbag parser tool for generating point clouds with rosbags.
One of the important point for exporting tightly coupled point clouds with Mapora is having high accurate GNSS/INS positions. To provide that, it is highly recommended to use a post-processing software for GNSS/INS positions.
The other important issue is having precise LiDAR-IMU calibration angles. If not, the possibility of having bad features in map is very high.
Some of the views of the point clouds can be seen below.
Mapora Tools
Mapora has 2 different executable. One of them is working with specific sensors with post-processed GNSS/INS data and the other works with rosbag includes PointCloud2, NavSatFix and Imu topics.