
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
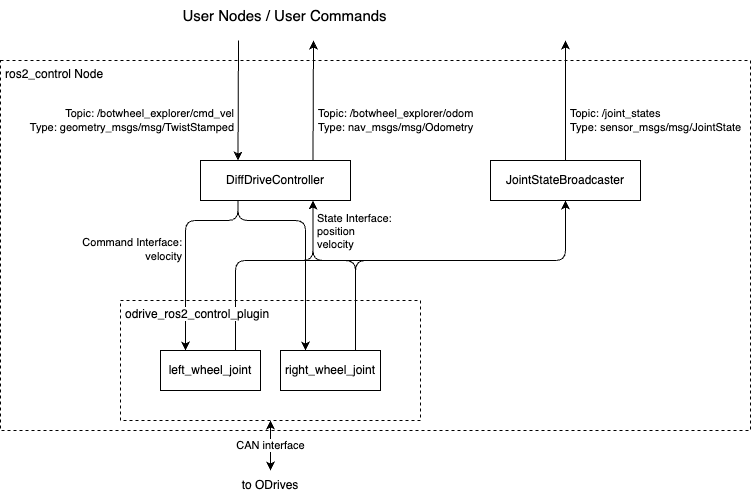
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged odrive_botwheel_explorer at Robotics Stack Exchange
|
|
odrive_botwheel_explorer package from ros_odrive repoodrive_botwheel_explorer odrive_can odrive_ros2_control |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/odriverobotics/ros_odrive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ODrive Robotics
Authors
BotWheel Explorer ROS2 Package
Work In Progress
This package contains:
- Hardware descriptor (URDF) files for the BotWheel Explorer.
- A launch file that allows to drive the robot around by sending
geometry_msgs/msg/TwistStampedmessages.
See also: odrive_ros2_control
Architecture
The system launched by botwheel_explorer.launch.py looks like this:
Usage Instructions
This assumes that your ODrives are already configured (with node_id 0 and 1) according to the docs and ready to go.
- Clone this repository
- Either into your existing colcon workspace if you have one. In this case run all following commands in your workspace.
- Or as a standalone directory. In this case switch to the cloned directory and run all following commands from there.
- Install Dependencies
rosdep install --from-paths odrive_ros2_control odrive_botwheel_explorer -y --ignore-src
- Build
colcon build --symlink-install --packages-up-to odrive_botwheel_explorer
- Launch
source ./install/setup.sh
ros2 launch odrive_botwheel_explorer botwheel_explorer.launch.py
When the system finishes launching (may take a few seconds on a slow machine), the ODrives with node_id 0 and 1 should automatically go active.
When you exit this command, the ODrives disarm if their watchdog was enabled.
- Inspect that the topics are available
$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/position [available] [unclaimed]
left_wheel_joint/velocity [available] [claimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/position [available] [unclaimed]
right_wheel_joint/velocity [available] [claimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
As you can see, there are two joints (two wheels) that have their velocity command interface claimed (by the DiffDriveController) and provide position and velocity feedback.
$ ros2 topic list
/botwheel_explorer/cmd_vel
/botwheel_explorer/odom
/botwheel_explorer/transition_event
/diagnostics
/dynamic_joint_states
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/tf
/tf_static
- Check ODrive feedback
```bash $ ros2 topic echo /joint_states — header: stamp: sec: 1706131922 nanosec: 319699404 frame_id: ‘’ name:
- left_wheel_joint
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| controller_manager | |
| diff_drive_controller | |
| joint_state_broadcaster | |
| ros2controlcli | |
| xacro | |
| odrive_ros2_control |