
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
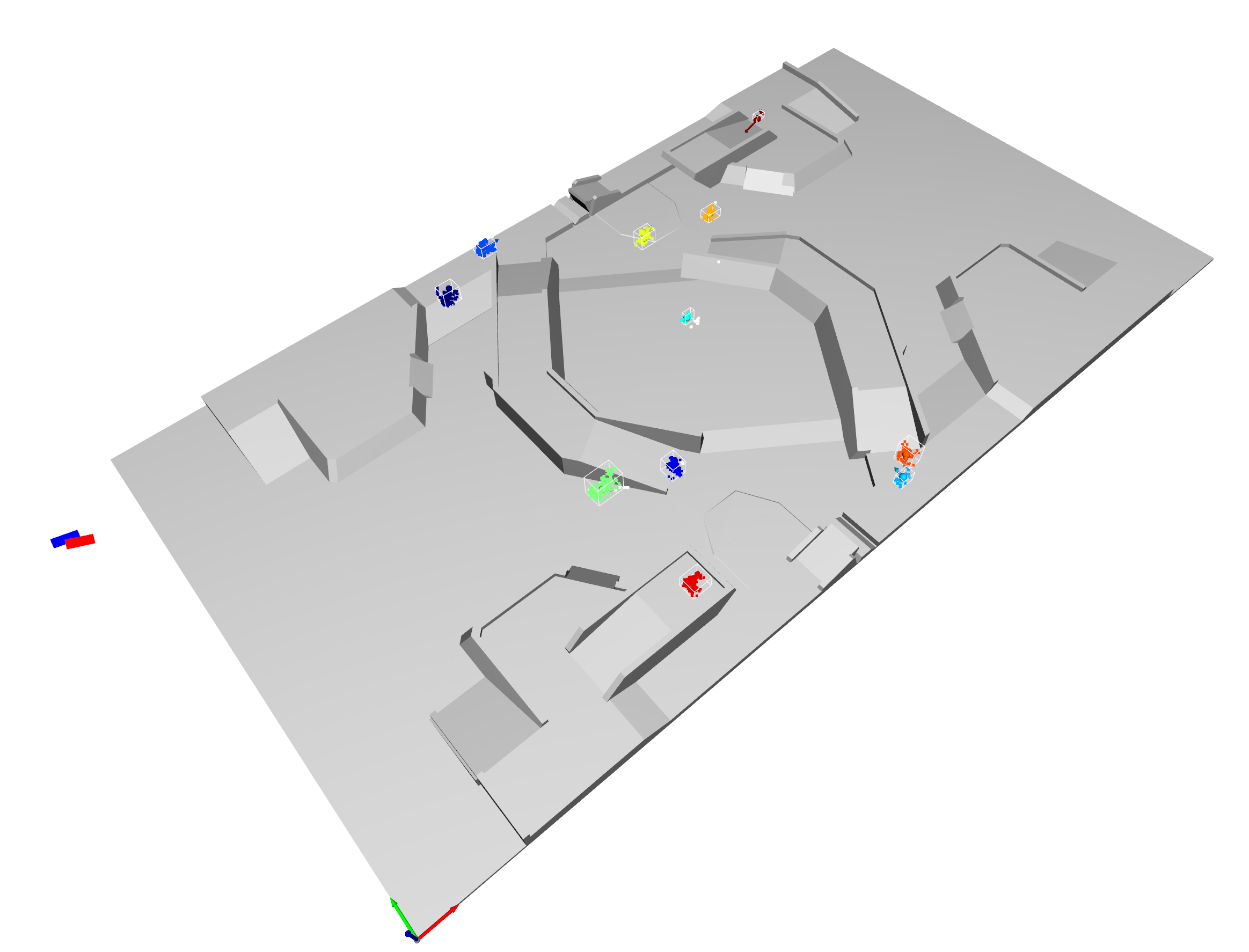
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pc_detector at Robotics Stack Exchange
|
|
pc_detector package from radar_ros_ws repodv_trigger hik_camera img_recognizer judge_bridge livox_v1_lidar livox_v2_lidar nn_detector pc_aligner pc_detector radar_bringup radar_interface radar_supervisor radar_utils result_visualizer target_matcher target_multiplexer target_visualizer |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | The MIT License |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源 |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Chenx Dust
Authors
PointCloudDetection
RoboMaster 2023 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站点云定位
项目设计
点云定位系统的设计目标,是作为雷达站确定场上运动目标的第一层检测,为后续的目标识别提供位置信息,同时借助其获取的丰富三维信息,进行目标预测从而保证跟踪的连续性。
项目优势
相比上海交通大学在 2021 赛季开源的雷达站代码 COMoER/LCR_sjtu 相比,我们采用基于点云的目标检测与跟踪,具有视觉识别所不具有的高灵敏性以及不全可见目标的检测能力。与此同时,我们的处理效率更为高效,在正常赛场条件下可实现 500Hz 以上1的处理速度,保证了雷达站的实时性。
项目架构
main.cpp 主程序 *核心*
config.yaml 配置文件
config.sample.yaml 样例配置文件
default.yaml 默认配置文件
Clustering.h/.cpp 聚类算法
Config.h 配置读取
KalmanFilter.h/.cpp 卡尔曼滤波
PcReceiver.h/_**.cpp 点云接收
Recorder.h/.cpp 内录程序
TargetMap.h/.cpp 目标跟踪 *核心*
Transform.h/.cpp 坐标变换处理
VisualizerHelper.h/_**.cpp 可视化相关
VoxelGrid.h/.cpp 点云体素化 *核心*
通讯协议
本项目兼容 Livox 激光雷达的通讯协议。
在发送数据时,我们使用了 MQTT 协议,以保证数据的实时性。
定位结果数据结构(发送于主题 pc_detected ):
{
"enemies": [
{
"id": uint,
"position": [float, float, float],
"velocity": [float, float, float],
"is_predict": bool,
"lost_time": uint,
"is_discarded": bool
}
]
}
部署方式
安装依赖
以 Ubuntu 22.04 作为部署环境,兼容 ArchLinux 等发行版。
sudo apt install libeigen3-dev libspdlog-dev libyaml-cpp-dev nlohmann-json3-dev libboost-dev libtbb-dev libpaho-mqttpp-dev
编译安装 Open3D
推荐编译选项:减少无用组件编译,使用系统 fmt 解决 Ubuntu 22.04 的部署问题
git clone https://github.com/isl-org/Open3D && cd Open3D
util/install_deps_ubuntu.sh
mkdir build && cd build
cmake -DBUNDLE_OPEN3D_ML=OFF -DBUILD_UNIT_TESTS=OFF -DWITH_OPENMP=ON -DBUILD_PYTHON_MODULE=OFF -DBUILD_EXAMPLES=OFF -DUSE_SYSTEM_FMT=ON -DGLIBCXX_USE_CXX11_ABI=1 ..
make -j$(nproc)
sudo make install
推荐编译方式
使用 Intel oneAPI ICX 编译器获得最佳性能
-
在一台搭载 i7-12700H 处理器的笔记本上,开启
-O3优化选项,使用icx编译器编译,于读取 PCD 文件的模式下达成。实际运行受到激光雷达速度限制,能达到稳定 49Hz 的处理速率。 ↩