
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
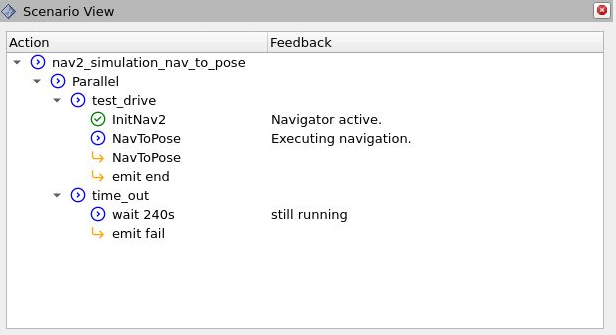
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.3.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2024-12-18 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
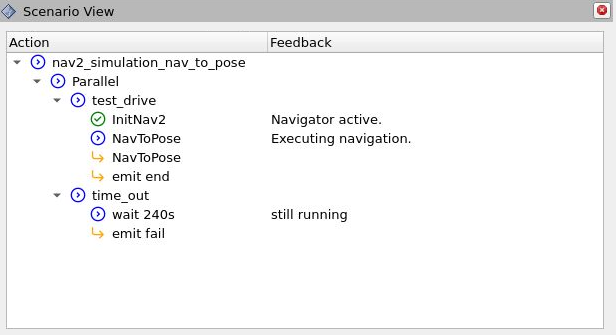
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |
Launch files
Messages
Services
Plugins
Recent questions tagged scenario_execution_rviz at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/IntelLabs/scenario_execution.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Intel Labs
Authors
- Intel Labs
Scenario Execution Rviz
The scenario_execution_rviz package provides rviz plugins for visualizing and controlling the scenario when working with ROS 2.
Scenario View Panel
The Scenario View panel shows the behavior tree of the running scenario. The panel is accessible under Panels :arrow_right: Add new panel :arrow_right: scenario_execution_rviz :arrow_right: ScenarioView. The following image shows a snapshot of the rviz plugin during a run of the example_nav2 scenario:
The plugin subscribes to /scenario_execution/snapshots by default. Double-click on the header to modify the topic.
Icon Licence
The MIT License (MIT) Copyright © 2019-2020 css.gg
Changelog for package scenario_execution_rviz
1.2.0 (2024-10-02)
- Initial creation of rviz plugin package for scenario execution
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| std_srvs | |
| geometry_msgs | |
| scenario_execution_interfaces | |
| py_trees_ros_interfaces | |
| ament_cmake | |
| rclcpp | |
| rviz_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| example_scenario_control |