
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
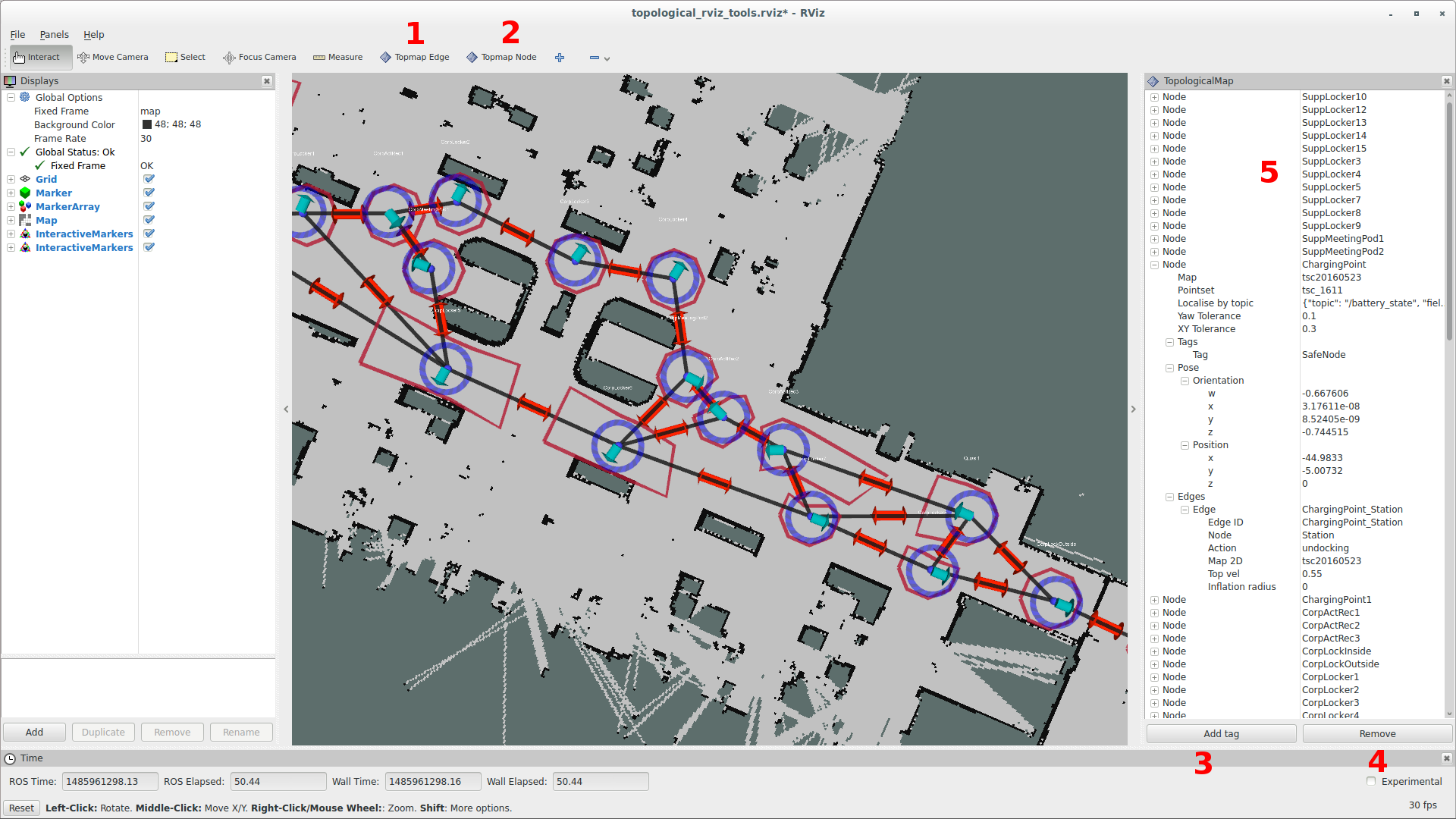
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path
Messages
Services
Plugins
Recent questions tagged topological_rviz_tools at Robotics Stack Exchange
|
|
topological_rviz_tools package from topological_navigation repotopological_navigation topological_navigation_msgs topological_rviz_tools topological_utils |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | The topological navigation framework |
| Checkout URI | https://github.com/lcas/topological_navigation.git |
| VCS Type | git |
| VCS Version | humble-dev |
| Last Updated | 2025-05-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | robot navigation ros2 |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Marc Hanheide
Authors
- Marc Hanheide
- Michal Staniaszek
topological_rviz_tools
Rviz tool for creating a STRANDS topological map
Usage
This rviz toolset can be launched using
roslaunch topological_rviz_tools strands_rviz_topmap.launch map:=/path/to/map.yaml topmap:=topmap_pointset db_path:=/path/to/db standalone:=true
map specifies the yaml file for the map you are using, and topmap the
corresponding pointset that exists in the database. db_path is used to point
to the database you want to use. If standalone is true, everything needed will
be run automatically. If false, it is assumed that other parts of the strands
system are running (navigation and mongodb_store in particular), and only run
a few additional things.
You can also add the node tool, edge tool and topological map panel to rviz
individually by using the buttons for adding tools or panels. You will need to
run the above launch file with standalone=false for this to work correctly.
When you launch with a database which contains a topological map, you should see something like the following:
You can move nodes around by clicking the arrow at the centre of topological nodes and dragging. The ring around the node allows you to change the orientation of the node. You can delete edges using the red arrows in the middle of edges.
The following sections give a little more detail about to tools and panel labelled in the image above.
1. The edge tool
Use this tool to create edges between nodes. Left click to select the start point of the edge, then click again to create an edge. The edge will be created between the nodes closest to the two clicks, but only if there are nodes within some distance of the clicks. Left clicking will create a bidirectional edge, whereas right clicking will create an edge only from the node closest to the first click to the second one. This tool stays on until you press escape.
The shortcut is e.
2. The node tool
This tool allows you to add nodes to the topological map. Click the tool and then click on the map to add a node in that location. Edges will automatically be added between the new node and any nodes in close proximity.
The shortcut is n.
3. Add tag button
This button allows you to add tags to nodes. You can select multiple nodes, and the tag you enter in the dialog box will be added to all of them.
4. Remove button
With this button, you can remove edges, tags, and nodes from the topological map. You can select multiple elements and they will all be removed at once.
5. Topological map panel
You can see all the elements of the topological map here. You can edit the following elements:
- Node name
- Node pose
- Node tags
- Node yaw tolerance
- Node xy tolerance
- Edge action
- Edge velocity
Ctrl-click allows you to select multiple distinct elements. Shift-click will select elements between the previously selected element and the current one.
Changelog for package topological_rviz_tools
2.4.0 (2022-01-25)
- Merge pull request #111 from adambinch/remove_strands_dependencies Removing strands navigation dependencies from topological navigation.
- update
- strands dependencies removed from topological_rviz_tools
- Merge branch 'master' of github.com:LCAS/topological_navigation into francescodelduchetto-toponav2-restrictions
- Merge branch 'master' of github.com:LCAS/topological_navigation into toponav2_launch
- Merge branch 'master' of github.com:LCAS/topological_navigation into faster_route_search2
- Merge branch 'toponav2-devel-restrictions' of github.com:francescodelduchetto/topological_navigation into toponav2-devel
- Merge branch 'master' of https://github.com/adambinch/topological_navigation into adam-master
- Contributors: Adam Binch, adambinch, francescodelduchetto
2.3.0 (2021-07-15)
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
- Merge branch 'master' of github.com:LCAS/topological_navigation into tmap_to_tmap2
- Merge pull request #82 from adambinch/fix_conflicts Fix conflicts
- Merge branch 'master' of github.com:LCAS/topological_navigation into fix_conflicts # Conflicts: # topological_navigation/scripts/execute_policy_server.py # topological_navigation/scripts/navigation.py
- Contributors: Adam Binch, adambinch
2.1.0 (2020-04-20)
- Merge pull request #8 from heuristicus/move_topo_rviz_tools Move topo rviz tools from strands_navigation
- added install for topmap interface
- 1.2.0
- updated changelogs
- 1.1.0
- changelogs
- 1.0.8
- updated changelogs
- 1.0.7
- updated changelogs
- added install for extra dirs (#365)
- Standalone easier to run on strands robots Would have to run with rviz=false and then run rviz on the main PC if the database is on on of the side PCs. With this change can run the database on the side PC and then run this with launch_db:=false to not have to run rviz separately
- 1.0.6
- updated changelogs
- 1.0.5
- updated changelogs
- update of absolute/relative topic names for multi-robot setup
- more descriptive names for topics displayed in rviz
- Can now place nodes with RMB to stop automatic edge creation Fix deletion dialogue, edges and tags were swapped
- Adding waiting for services
- Update topological_edge_tool.cpp
- Adding waiting for the add_node service
- Update strands_rviz_topmap.launch
- 1.0.4
- updated changelogs
- set version to 1.0.3 as the rest of repository
- add standalone flag for when navigation is running
- Topmap editor
(#344)
- Initial commit
- initial slightly modified clone of plantflag tutorial
- Add slightly modified clone of rviz views panel
- Plugin and tool now load properly
* Shuffling things around, taking code from existing rviz property Looks like properties are the best way to look at things from rviz. Kind of a rudimentary approximation of messages. Not sure of the best way to transfer data back to the map once we want to change it, but that will come once we can view the map data in the panel.
- finally have compiling base classes to modify
- renamed classes
- fix function call parens
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/strands_rviz_topmap.launch
-
- topmap
- map
- rviz [default: true]
- standalone [default: true]
- launch_db [default: true]
- db_path