
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.

Controllers
UR Controller
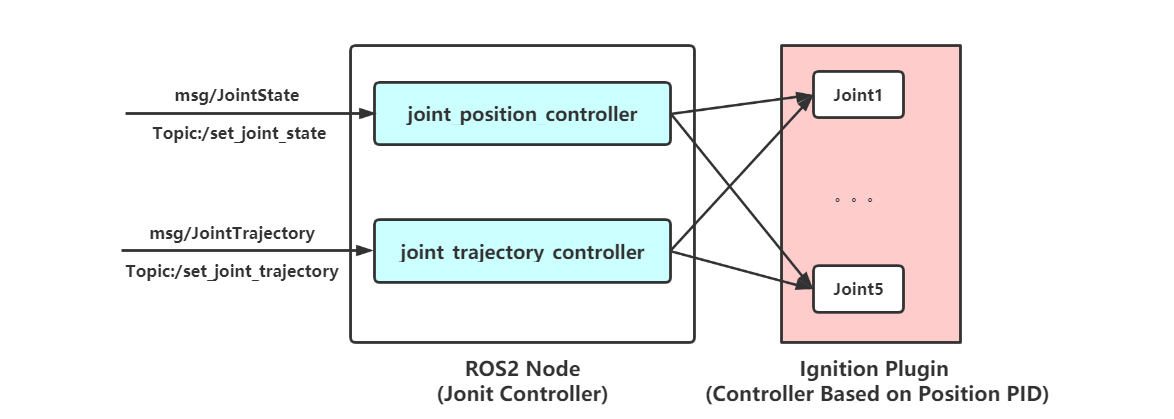
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged universal_robot_ign at Robotics Stack Exchange
|
|
universal_robot_ign package from universal_robot_ign repouniversal_robot_ign |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | run universal robot in Ignition Gazebo simulator |
| Checkout URI | https://github.com/gezp/universal_robot_ign.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-09-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Zhenpeng Ge
Authors
universal_robot_ign
universal_robot_ign : Run universal robot in Ignition Gazebo simulator .
It provides SDF models of universal robot for Ignition Gazebo. In addition, it also provides a moveit2 application demo and simple grasp demo with Gripper Robotiq140 .
Usage
Install
- ROS 2: Galactic
- Ignition : Fortress
- dependencies:
moveit2,xmacro,sdformat_tools(from source code)
#install dependency
pip install xmacro
sudo apt-get install ros-galactic-moveit
export IGNITION_VERSION=fortress
#cd src of ros2 workspace and download source code
git clone https://github.com/gezp/sdformat_tools.git
git clone https://github.com/gezp/universal_robot_ign.git
#cd ros2 workspace and build
colcon build
UR10 moveit2 demo
launch Ignition Gazebo simulator for UR10
ros2 launch universal_robot_ign ur10_ign.launch.py
-
joint_trajectory_controllerwill be used in this demo
launch moveit2 move_group action server for UR10.
ros2 launch universal_robot_ign ur10_moveit2_demo.launch.py
run moveit2 client node, plan to goal
ros2 run universal_robot_ign test_pose_goal.py
- start position <-> goal pose:
[-0.0, 0.4, 0.6, 0.0, 0.0, 0.0](loop)
the result:
UR10 + Robotiq140 Grasp demo
- control gripper Robotiq140 to grasp object and control UR10 based on joint position.
launch Ignition Gazebo simulator for UR10 + Robotiq140
ros2 launch universal_robot_ign ur10_robotiq140_ign.launch.py
- use Ignition plugin
RobotiqControllerto control Robotiq140.
run gripper test node to grasp stick model by closing gripper
ros2 run universal_robot_ign test_gripper.py
#1 : close gripper to grasp.
#0 : open gripper.
the result:
Models
the package contains some SDF models :
- robotic arm
universal_robotmodels :ur3,ur5,ur10 - robotic gripper models:
robotiq140
in addition, it also provides a combination model ur10_robotiq140 (resource/xmacro/ur10_robotiq140.sdf.xmacro), which is ur10 robotic arm attached robotiq140 gripper.
the sdf files of these models are written modularly by use xmacro which is a xml macro tool.
Controllers
UR Controller
Ignition Controller
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| sensor_msgs | |
| trajectory_msgs | |
| ament_cmake | |
| ros_ign_bridge | |
| ament_lint_auto | |
| ament_lint_common | |
| ros_ign_gazebo |