
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
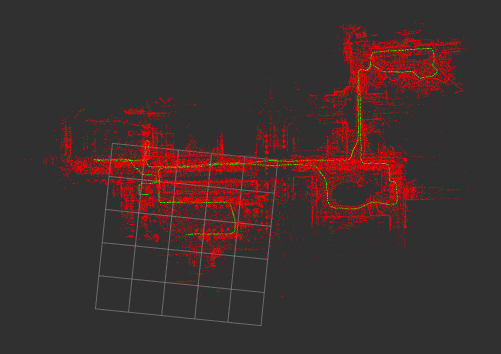
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/lidar_localization_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| lidar_localization_ros2 | 1.0.0 |
README
lidar_localization_ros2
A ROS2 package of 3D LIDAR-based Localization.
Quick Start
From this repository in the local workspace:
source scripts/setup_local_env.sh
cd ../build_ws
colcon build --symlink-install --packages-up-to lidar_localization_ros2
cd ../repo
source scripts/setup_local_env.sh
Then choose the path that matches what you want to do:
| Goal | Start here |
|---|---|
| Build the package in this workspace | Local Build |
| Launch the LiDAR localizer for Nav2 | Nav2 launch |
| Run a self-contained Nav2 smoke path | Recommended entry points |
| Run public replay/regression checks | Benchmarking |
| Evaluate a rosbag against reference poses | Benchmarking guide |
| Develop or compare recovery behavior | Experiment-First Development |
Check what v1.0.0 does and does not claim |
v1 status |
For Nav2 use, provide a pointcloud map, matching 2D map_yaml when launching the full Nav2 stack,
an odom source publishing odom -> base_link, and an initial pose on /initialpose.
Status
The repo is now packaged as v1.0.0.
- recommended Nav2 preset:
param/nav2_ndt_urban.yaml - verified flows:
nav2_lidar_localization.launch.py,nav2_navigation.launch.py,run_nav2_demo_smoke,run_nav2_replay_smoke - current boundary: long-horizon urban replay beyond the validated smoke path is still an active robustness problem, not a solved one
See CHANGELOG.md for the release summary and docs/v1_status.md for the concrete validated scope and known limits.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Requirements
- ndt_omp_ros2
-
small_gicp (optional, for
SMALL_GICPandSMALL_VGICP)
If small_gicp is installed as a CMake package at build time, SMALL_GICP and SMALL_VGICP
are enabled automatically.
local build
For the no-sudo local prefix workflow used in this workspace, see docs/local_build.md. After the first successful build, load the environment with:
source scripts/setup_local_env.sh
Experiment-First Development
Runtime code lives in src/ and include/. Competing ideas live in experiments/ and are assumed to be discardable.
For the current experiment problems, this repo keeps multiple comparable implementations behind minimal interfaces and regenerates the comparison docs from one suite entry point:
ros2 run lidar_localization_ros2 run_experiment_suite.py
Problem-specific runners are also available:
ros2 run lidar_localization_ros2 run_imu_guard_experiments.pyros2 run lidar_localization_ros2 run_borderline_gate_experiments.pyros2 run lidar_localization_ros2 run_recovery_action_experiments.pyros2 run lidar_localization_ros2 run_reinit_trigger_experiments.py
The suite updates:
The rule is simple: new behavior should be introduced as multiple comparable variants first, then only the winning behavior is promoted into runtime core.
For a one-command regression pass across both the short public checks and the heavier Nav2 long-replay recovery check:
ros2 run lidar_localization_ros2 run_release_regression_suite.sh
This aggregates:
run_public_regression_suite.shrun_nav2_reinit_supervisor_regression.sh
and writes a combined summary under artifacts/public/release_regression_suite/.
File truncated at 100 lines see the full file