No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
jsk_ik_server
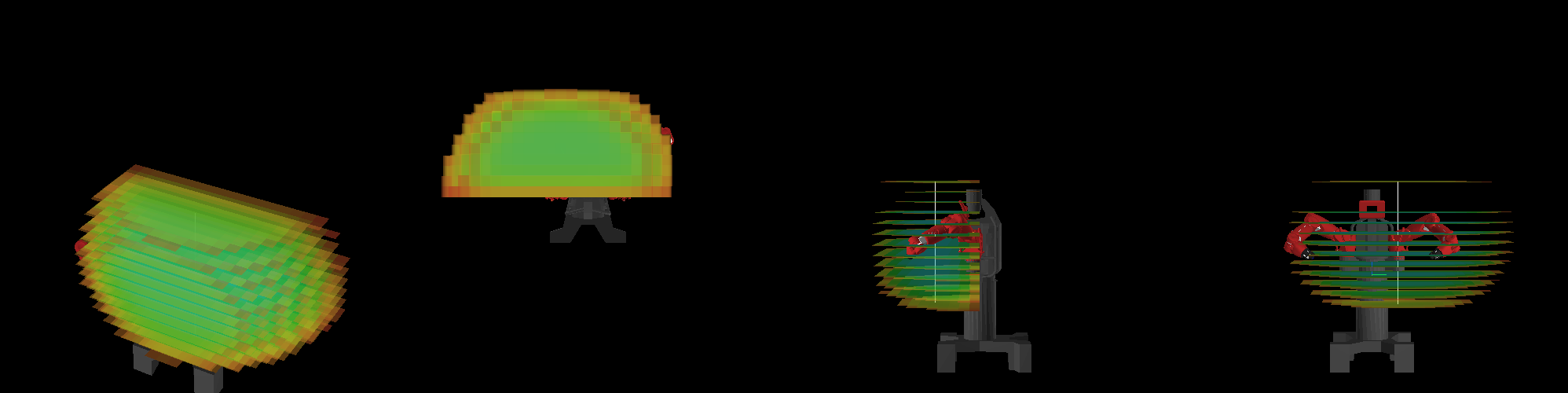
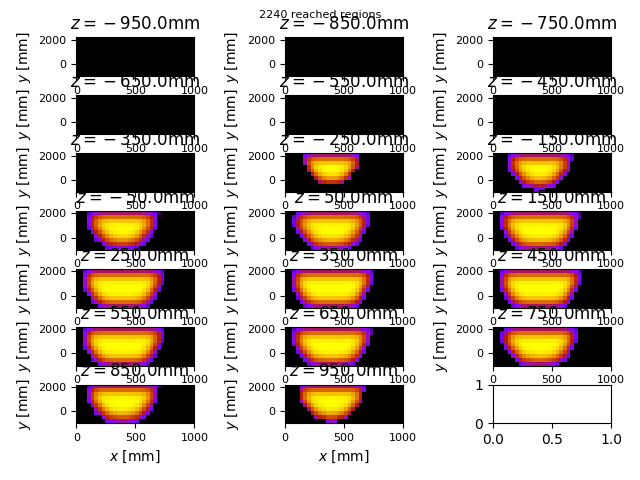
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
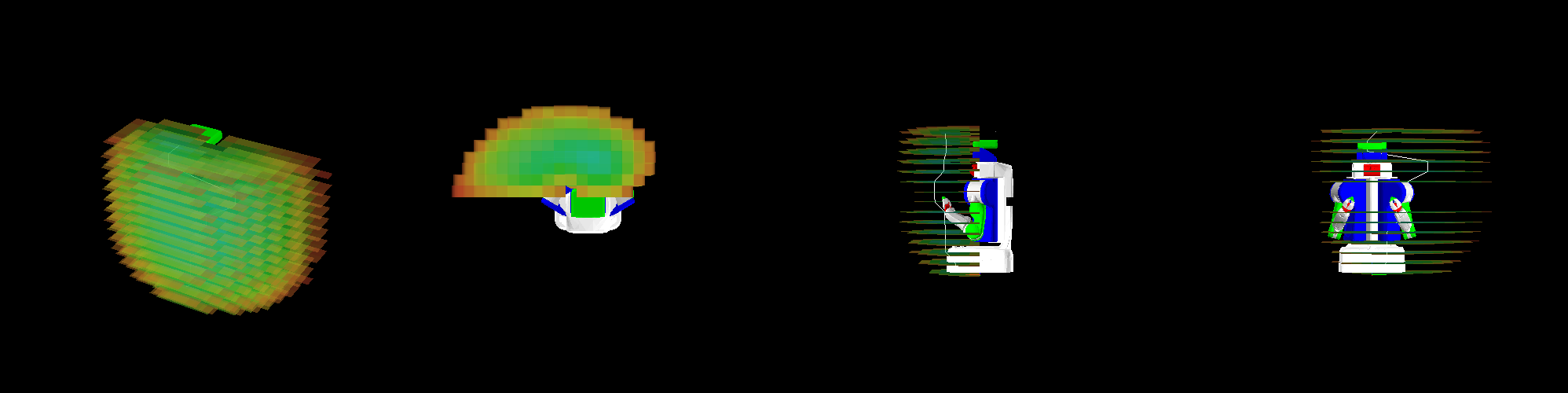
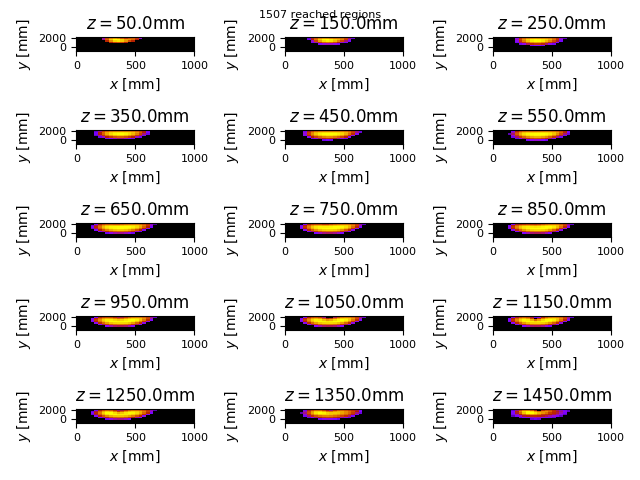
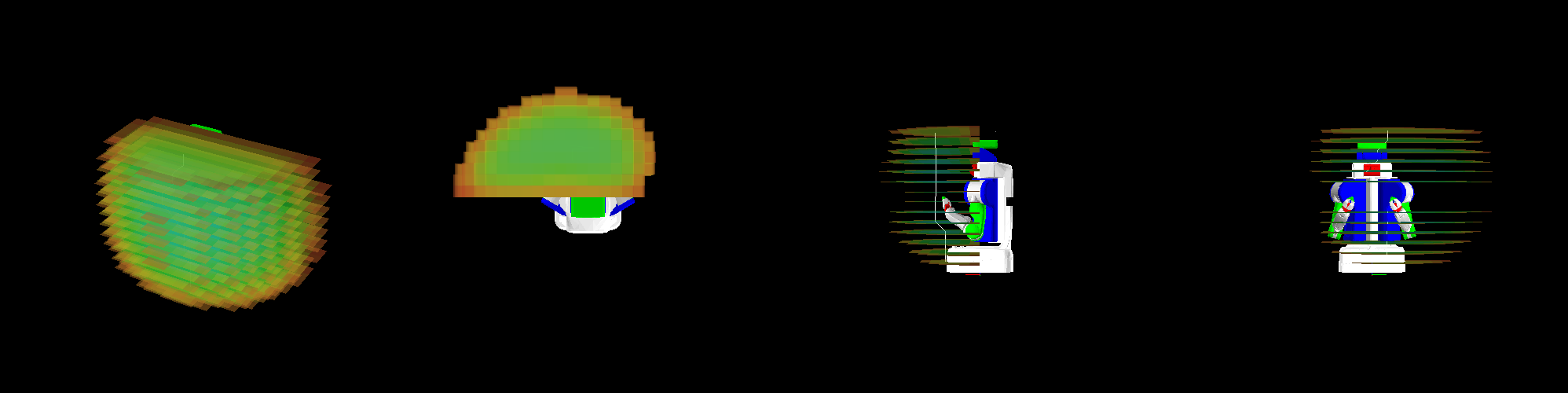
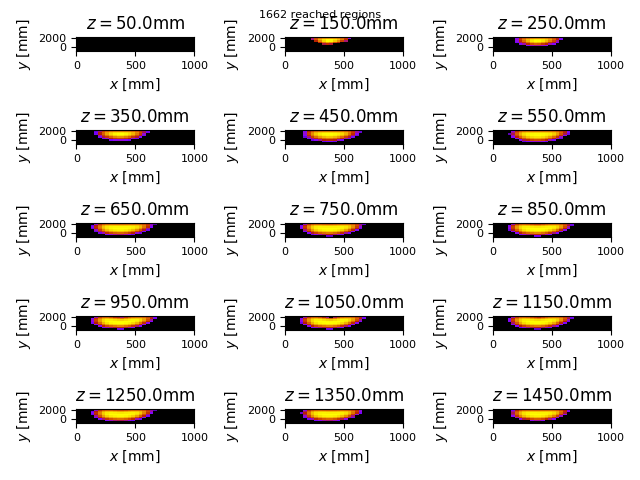
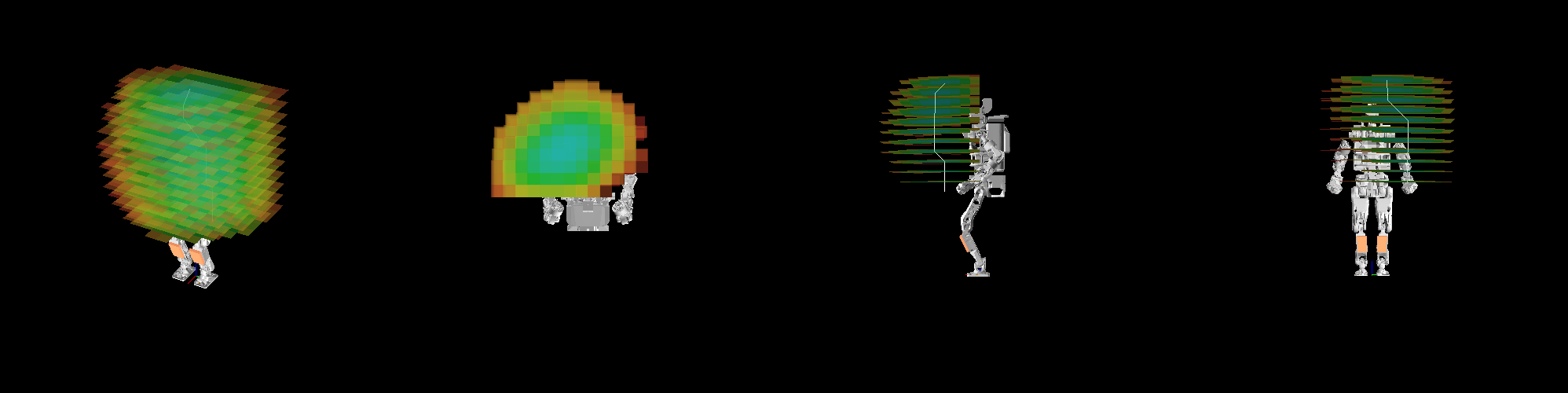
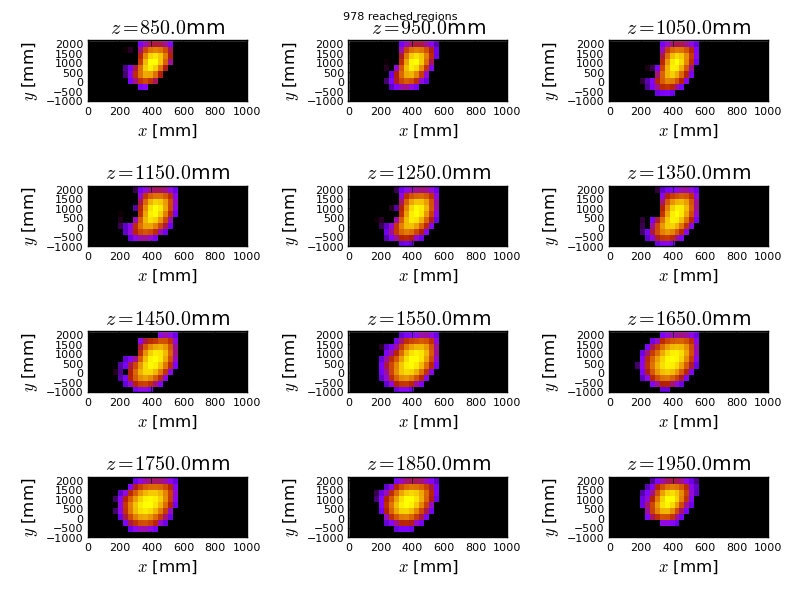
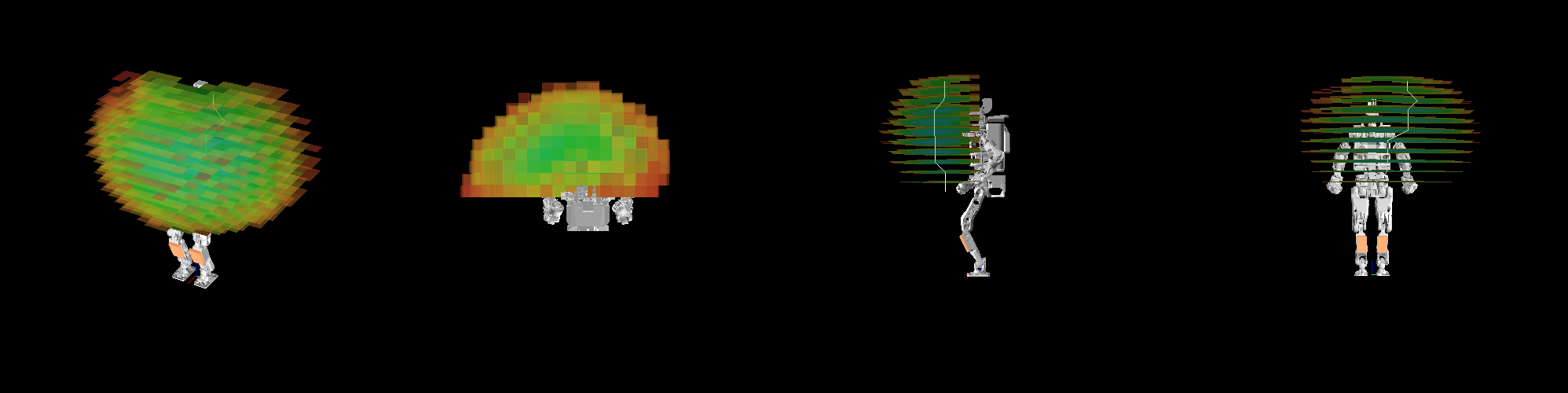
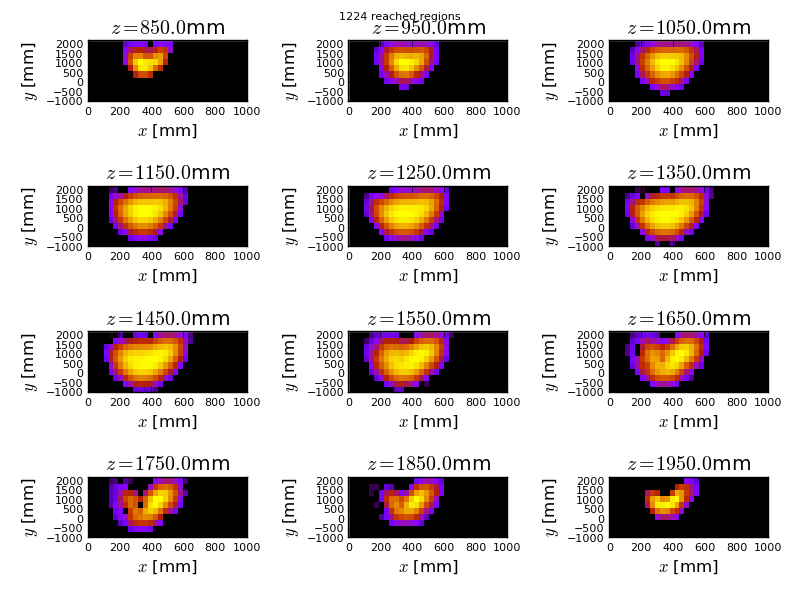
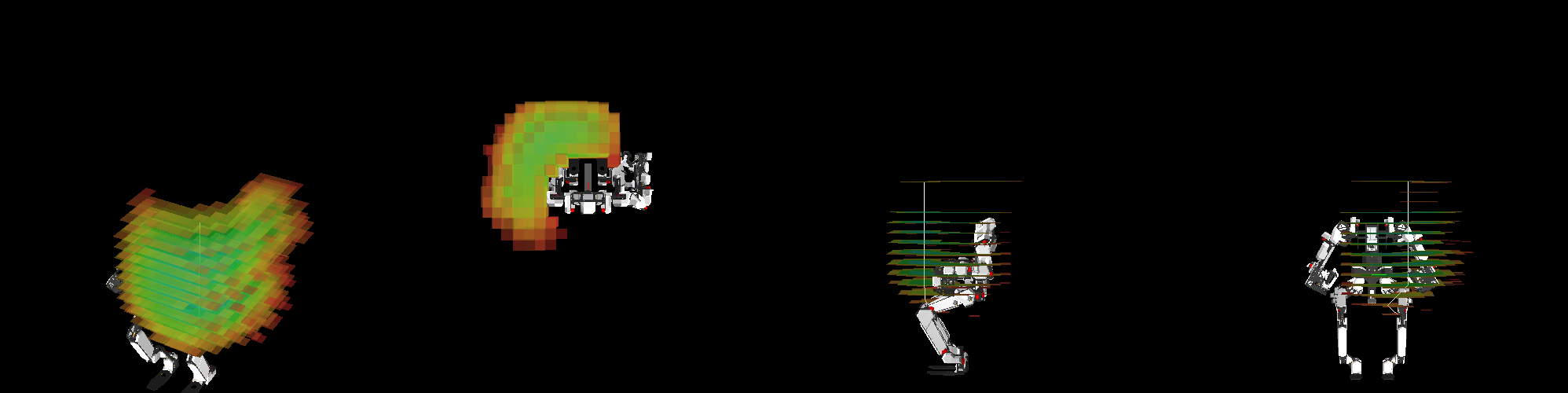
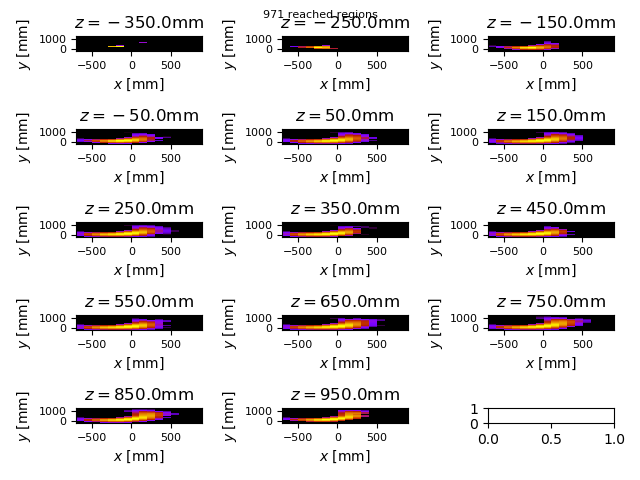
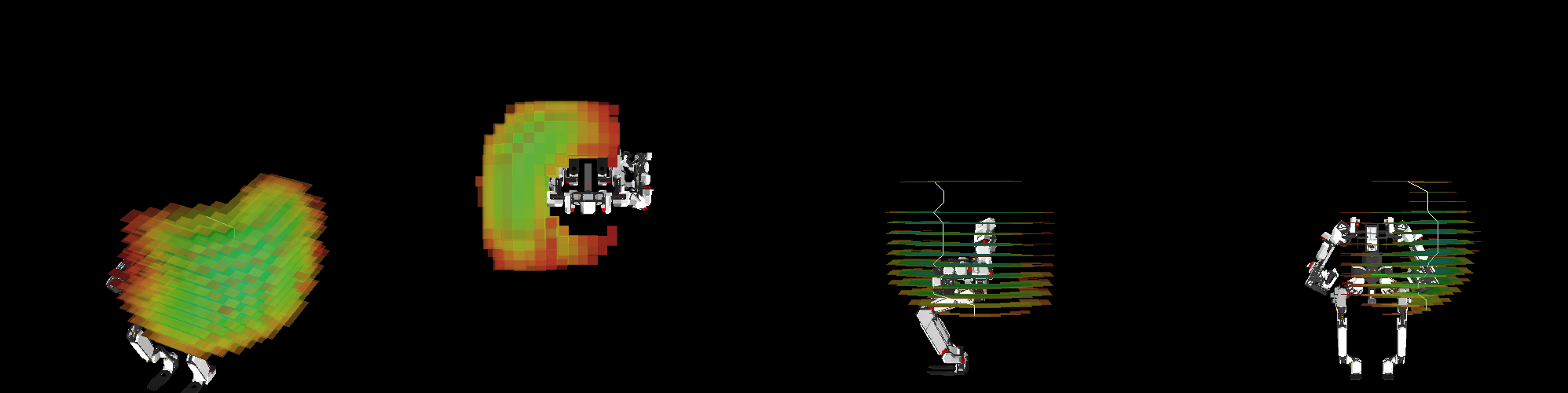
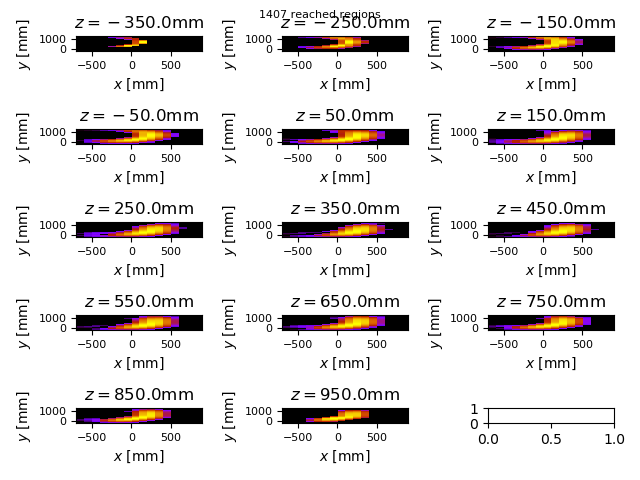
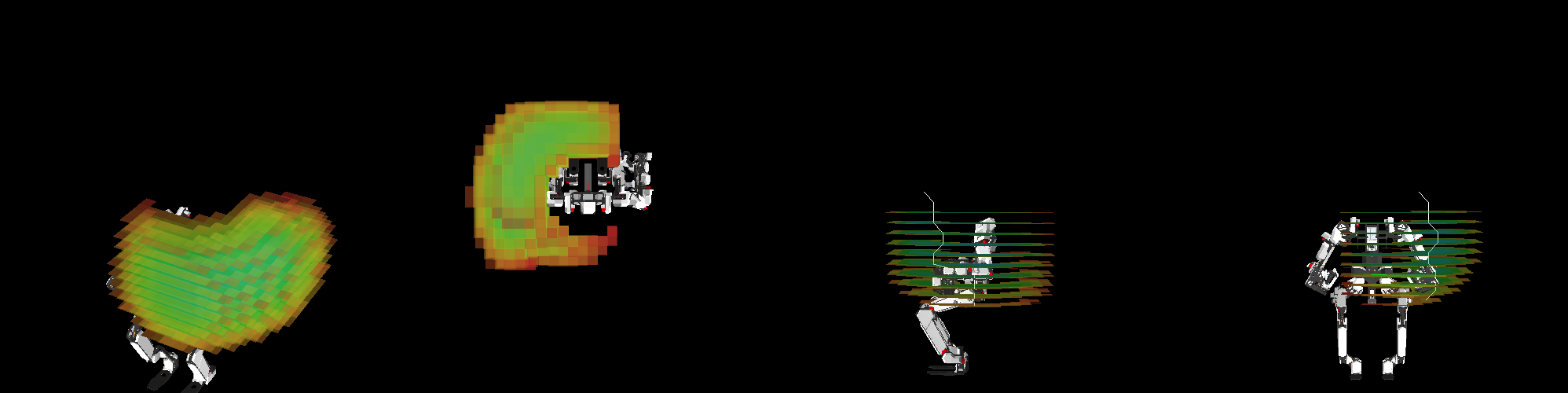
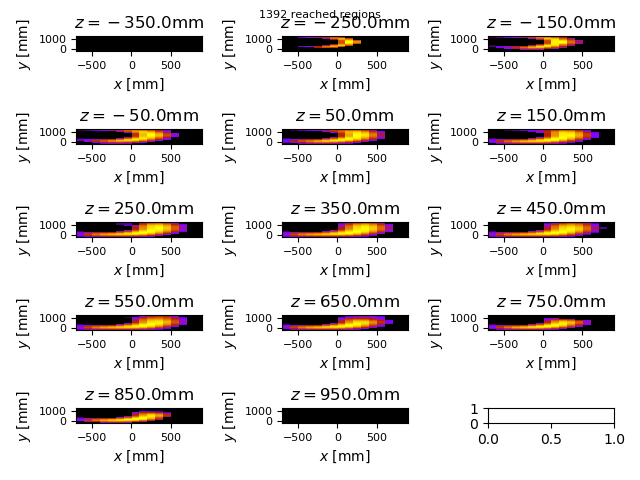
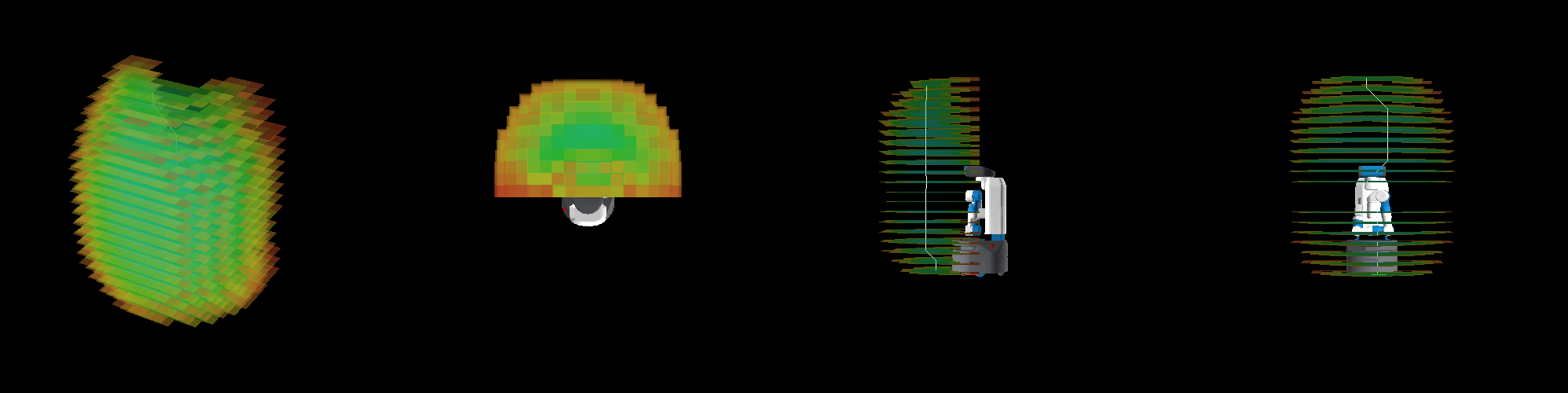
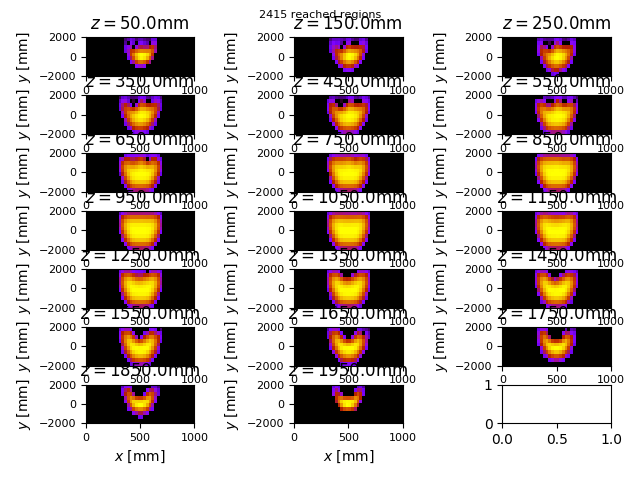
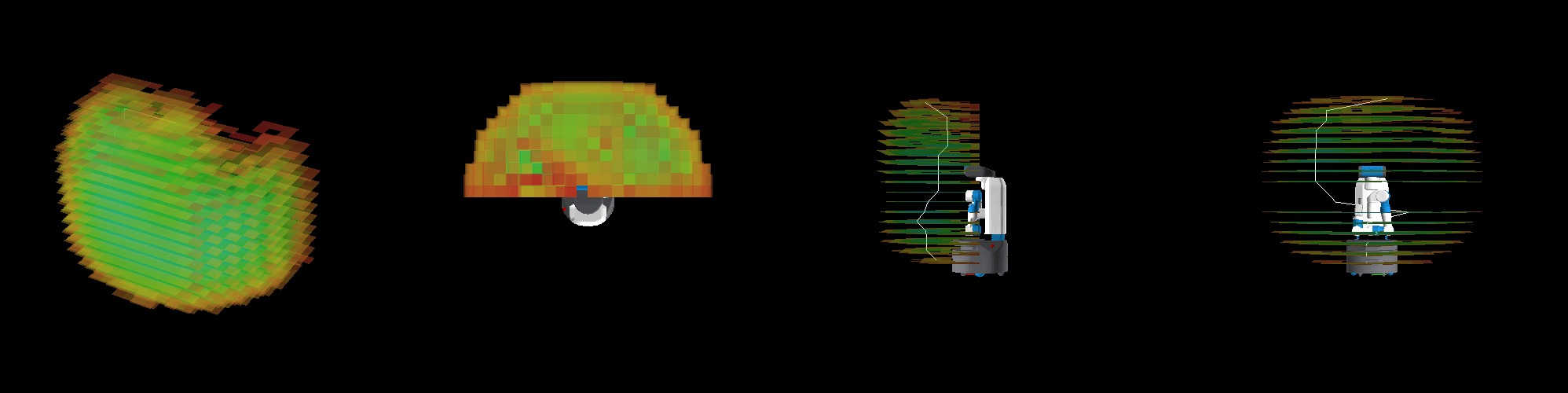
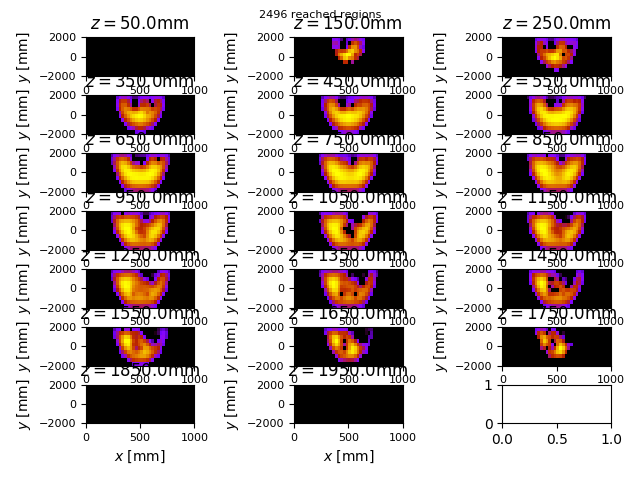
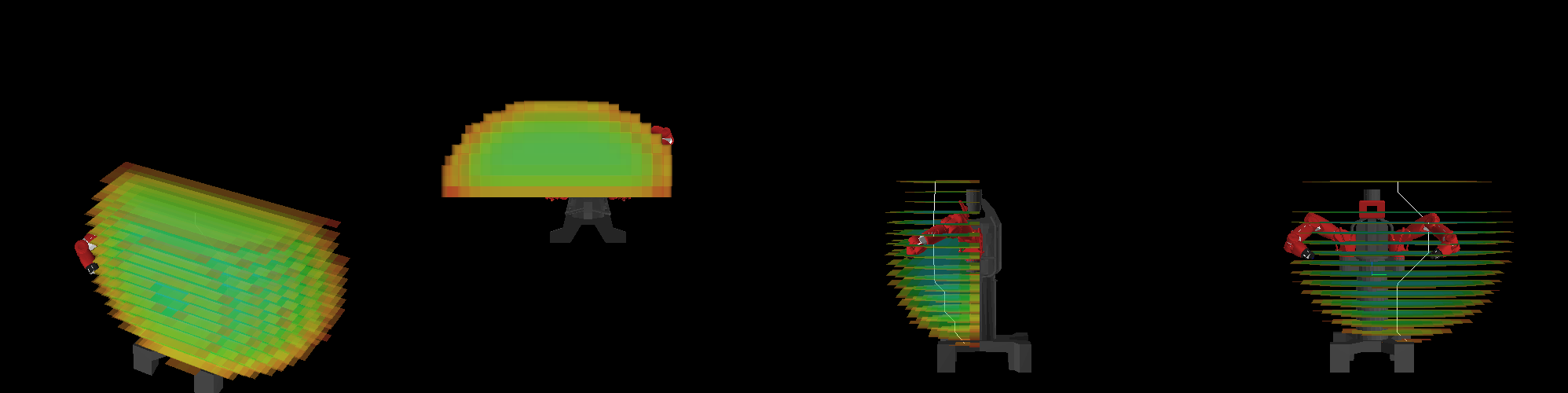
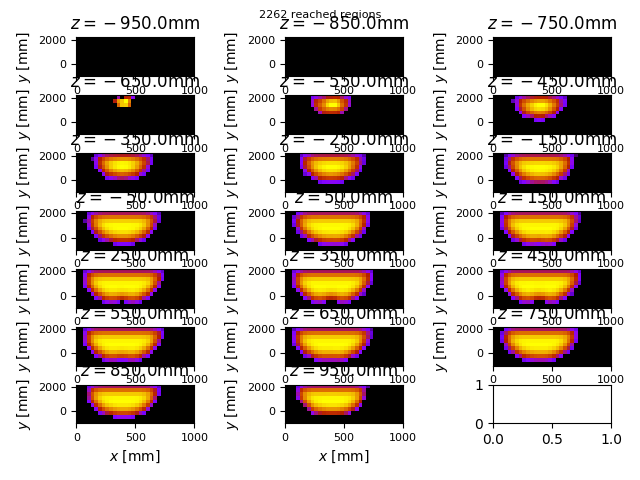
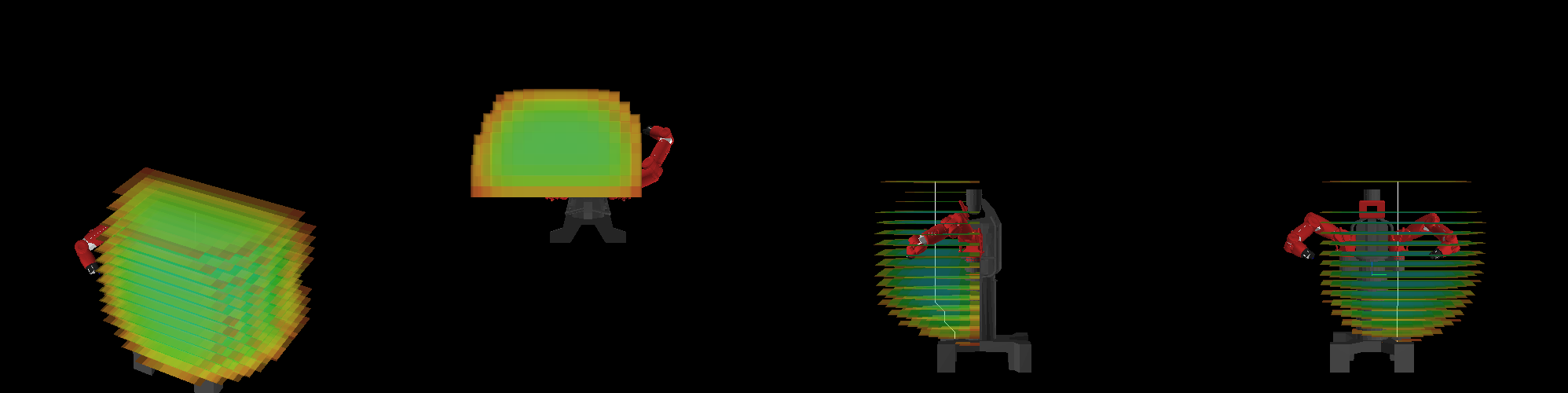
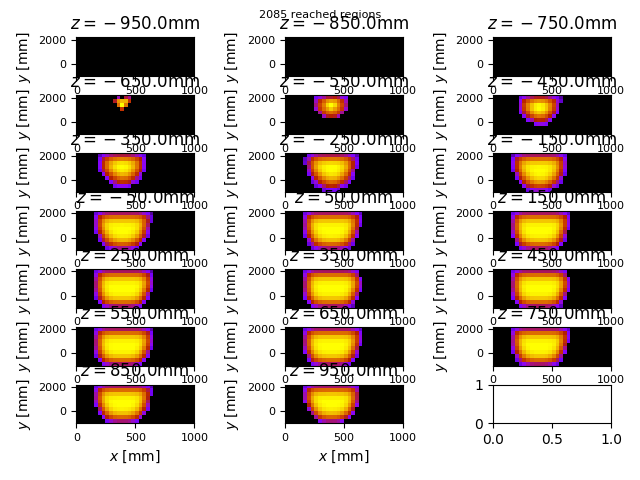
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
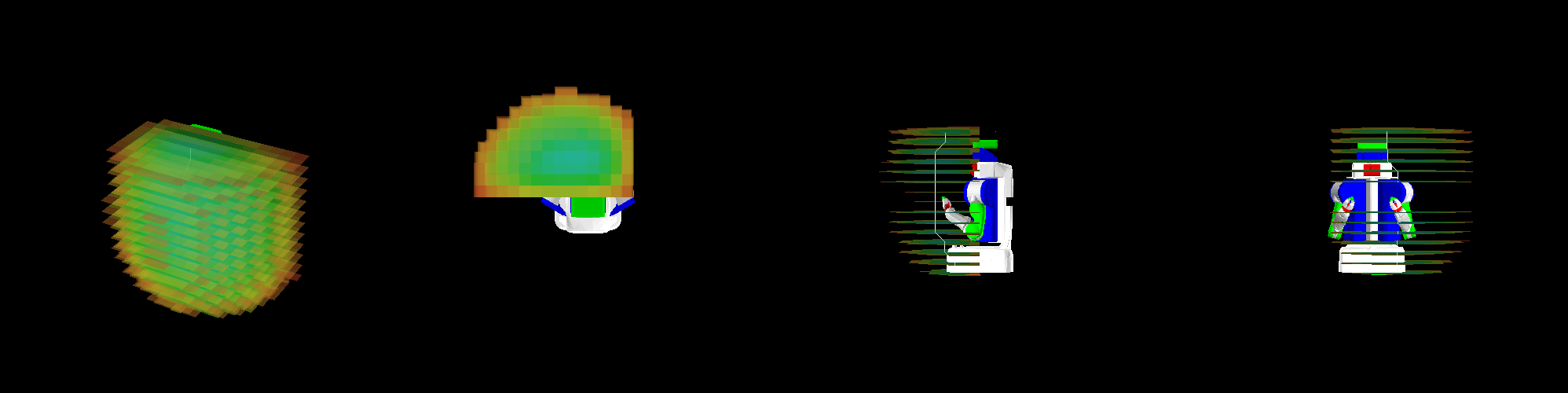
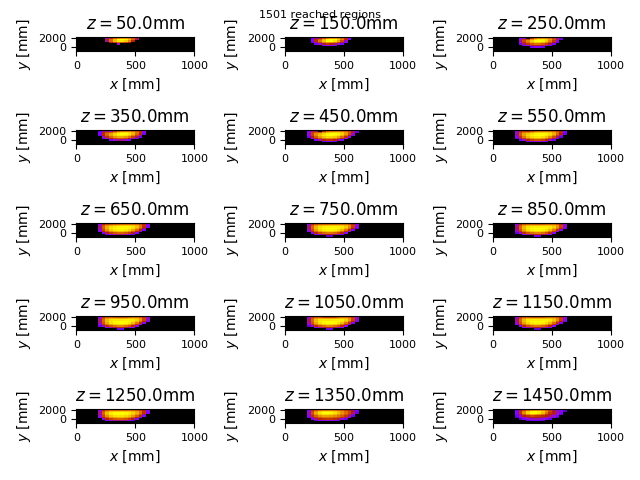
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
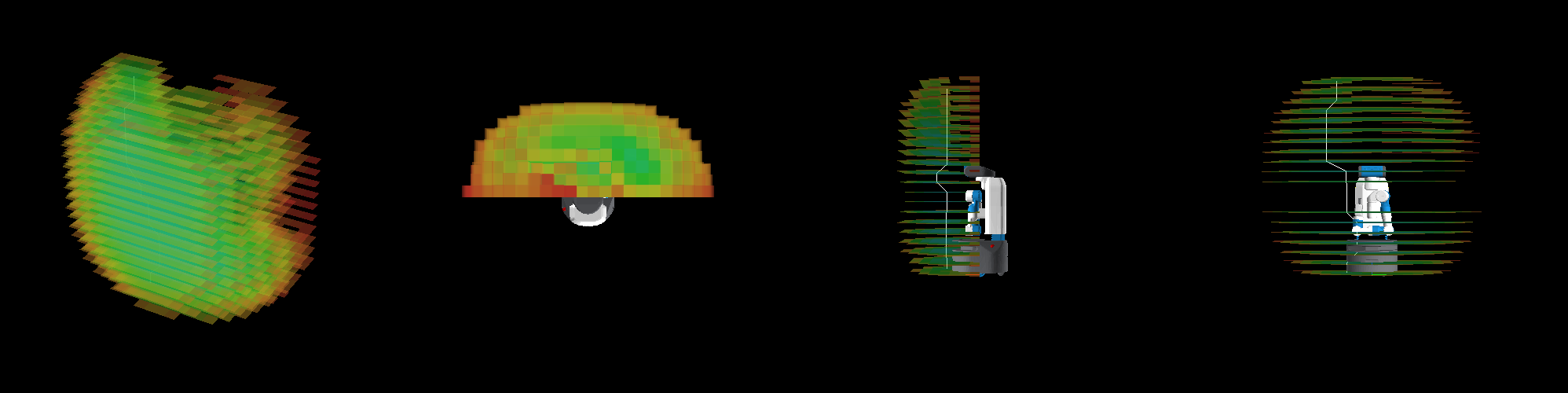
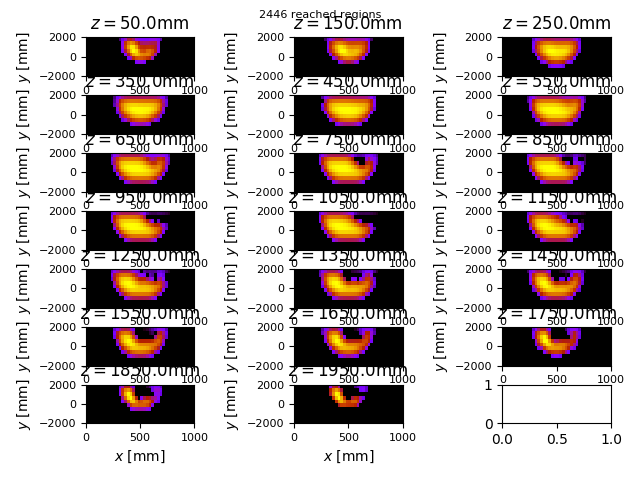
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
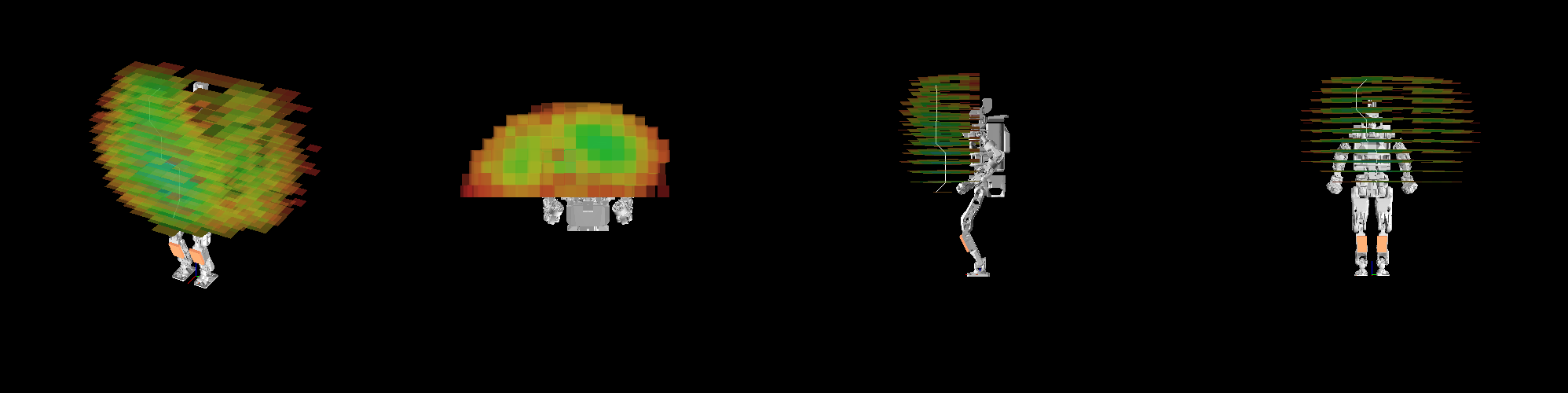
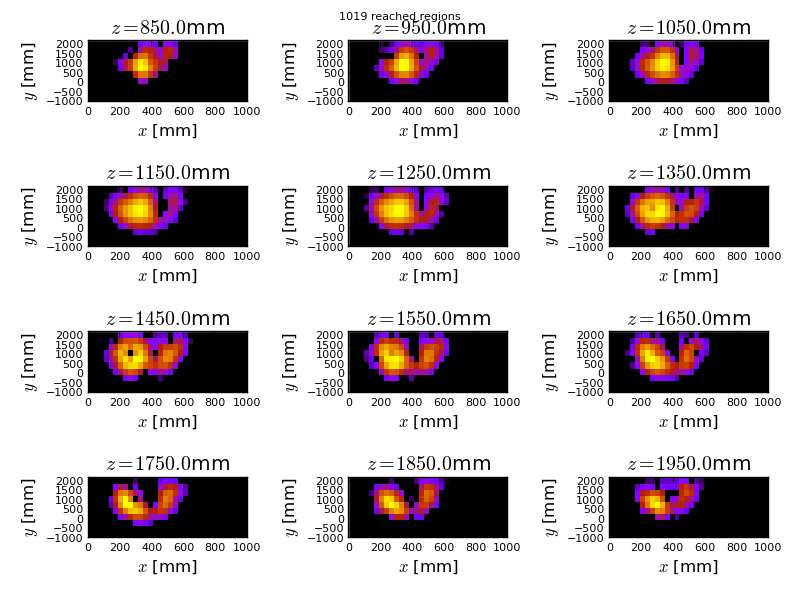
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
CHANGELOG
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
0.1.5 (2015-01-08)
- pass warnp as argument in :fullbody-ik-main
- remove sample robot test
- Merge branch 'master' into update-samplerobot-in-ik-server
- use unix:usleep because hrpsys stops clock
- use hrpsys sample robot for ik server
- Contributors: JSK Lab Member, leus, Yusuke Furuta
0.1.4 (2014-10-21)
- support hrp2jsknts in ik-server
- adding hrp2w-ik-server.l
0.1.3 (2014-10-10)
- add ik-server wait function, in travis, ik-server is slow to start
- install euslisp in share directory
- change ik-server files all exectable
- add :ik-server-name args, smaple robot has name with - charactre
- forbit to use copy-object of link cascoords object
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use singleton class to maintain view point of rviz to have persistency across several plugins
- support multiple instances per one plugin class
- Merge pull request #47 from s-noda/ik_server_publish_default_end_cords ik server publishes posestamped of default-end-coords
- add publish statement of default end coords as posestameped message, frame_id = root-link
- remove needless comments
- Merge branch 'master' of https://github.com/jsk-ros-pkg/jsk_control into ik-server-remote-unused-overwrite
- support jsk_teleop_joy in robot-controller-sample.launch of jsk_ik_server
- remove needless ik-server class definitions
- support other robot, not only staro in robot-controller-sample.launch
- forbit to generate viewer if display missing
- add dependacy on rostes
- remove needless ik-server impl
- add test files and rostest declearation in catkin,cmake and CMakeLists.txt
- remove :cog-convergence-check, :inverse-kinemtiacs-with-error functions
- add sample dir, using spacenav and ik-server, control robot
- add IK_OPTION argument to staro-ik-server-test.launch
- add staro-ik-server.launch
- add IK_OPTION argument to hrp2jsk-ik-server-test.launch
- add additional-ik-options
- added staro specific code for ik-server
- fix usage of cog-convergence-check function, correspond to irtmode.l update
- #9: install moveit_msgs with package.xml for jsk_ik_server
- fix udpate-support-links timing, please call this fucntion after initialization of ik-server
- hand existance check add
- add default-end-coords variable, forbit to use :end-coords statement
- add client_test_with_leg flag, check if support polygon correctly transformed
- fix transformation of support links, convert support polygon to the target coordinate
- fix supprot-link usage, and remove :end-coords
- bug fix, use link name as frame_id
- add configuration dir, but now, not supported yet
- supprot group_name=whole_body, fix-limb='(:rleg :lleg)
- /odom transformation validated without tf
- ik-server transform all coords using robot model and from-id,
- fix name -> link matching, use find-link-from-name funciton
- convert all frame_id to root-link-frame-id slots, if null, convert using robot model
- fix for collision check, add slot variable of defualt collisoin link
- fix the timing of make-convex function, just before call-ik-server
- add some parameter for collision avoidance
- :ik-server-call function support collision-avoidance-link-pair
- all-test.launch add, for test
- added launch/hrp2jsknt-ik-server.launch
- added svn exclude in installation of jsk_ik_server/catkin.cmake
- fix ik-server return joint_State, link names -> joint names
- joint-state message methods check fix, for hydro
- moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION check fix
- bound check for hydro message type change
- assoc hrp2jsknt model hand and wrist
- add link-list arguments, hrp2 model separate into body and hands
- pr2 has no leg limbs
- add some comment, and test programs are changed to use :fix-limbs option
- fix robot link-list slots variable, pr2 had not had gripper links
- remap /solve_ik -> //solve
- fix typo, transfrom -> transform
- multi_dof_joint_States :joint_transforms -> :transform in hydro
- hrp2 ik-server files donot use tf
- multi-6dof-joint-states supported,
- remove viewer arg from :update-joint-states
- comment quaternion usage
- base coords in joint_states, eular angle and quaternion supported
- add slots value ik-server-name and ik-server-service-name to set node name and service name
- add ik-server-call function, this functions can be used just the same as euslisp :fullbody-inverse-kinematics functions
- mv fullbody-ik-client-test.l to test dir and fix some dependancy of test launcher files. please check test launcher files before change configuration
- remove unused require statement
- remove test dependancy from manifest.xml, it's ok? to remove pr2eus and atlashogehoge
- catkinize jsk_ik_server
- make fullbody ik client class for ik server
- add :support-links args, change foot-convex and targe-centroid-pos
- remove unused comment, and some arg name fix
- :fix-limbs '(:limb1 :limb2 .…) supported
- simplyfy :fullbody-ik-main, old versino move to old-ik-server.k
- load only robot model file instead of interface file.
- remove fix-limb-cords slots,
- change ik-server-test.launch for fullbody-ik-client.l
- hrp2jsk-test fucntino add
- change dir configuration, each ik-server.l move to ik-server-impl dir
- add :inverse-kinematics function, causion, to fix pr2 model torso, :torso-fix t :use-torso 0 option needed
- fix ik-server-call function, options has nil list supported
- fix objects usage
- add some test functions
- rename hoge slot variable to hoge
- rename eus-fullbody-ik-ex -> ik-server-util, i think -ex is terrible naming
- remove unused functions
- add old-ik-server, from hrpsys_gazebo_atlas
- change order m -> mm
- joint name convert to string, and robot-model -> cascaded-link
- change euscollada-robot -> robot-model
- add viewer slots in ik-server class, not only irtviewr, but pickview can be used
- remove global variables, usage, generate robot object, and call (ik-server-call :robot )
- move-target, taget-coords, links-list length check add
- change some comment, not so important
- overwrite make-convex function, bacause hrp2 has toe joint
- centroid < convex check add
- additional-weight-list supported,
- bug fix, if target-centrid-pos == null, then not call cog-ceonvergence check
- add base coords to return statement of ik-server
- arrow object in ik-server viewer trach the first coordinamte of target ones
- debug-view flag can be changed
- ik-sever.l validated with fullbody-ik-client.l, but there is a strange change, base link tranformation need to be called twice?(line: 270)
- fullbody-ik-cline.l add, call ik-server with the same argment of euslisp :fullbody-inverse-kinematics functino
- coordinates fix
- fix some key name of ik_request
- add fullbody-inverse-kinematics-service-cb functino, for group_name =:fullbody-inverse-kinematics, not tested
- do not load robot-interface.l , load just model.l
- added hrp2 launch files
- deleted atlas-eus-ik-client.l
- remove arm_navigation_msgs
- add more debug messages
- not load pr2-interface.l, just load model files.
- reverted last commit. added hrp2jsk, hrp2jsknt server programs.
- merge pr2 and atlas ik server
- deleted atlas-eus-ik-client.l : client program is common for all robots.
- use make-foot-convex for humanoid robot
- removed atlas-end-coords.l: this is copy of the file under hrpsys_gazebo_atlas and is not necessary here.
- removed atlas specified files from eus-fullbody-ik-ex.l and ik-server.l
- change fullbody-ik function to class method
- add eus ik server package
- Contributors: Ryohei Ueda, Yohei Kakiuchi, Yusuke Furuta, Kei Okada, Masaki Murooka, Shintaro Noda
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknts-ik-server-test.launch
- test/atlas-ik-server-test.launch
- test/pr2-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
CHANGELOG
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
0.1.5 (2015-01-08)
- pass warnp as argument in :fullbody-ik-main
- remove sample robot test
- Merge branch 'master' into update-samplerobot-in-ik-server
- use unix:usleep because hrpsys stops clock
- use hrpsys sample robot for ik server
- Contributors: JSK Lab Member, leus, Yusuke Furuta
0.1.4 (2014-10-21)
- support hrp2jsknts in ik-server
- adding hrp2w-ik-server.l
0.1.3 (2014-10-10)
- add ik-server wait function, in travis, ik-server is slow to start
- install euslisp in share directory
- change ik-server files all exectable
- add :ik-server-name args, smaple robot has name with - charactre
- forbit to use copy-object of link cascoords object
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use singleton class to maintain view point of rviz to have persistency across several plugins
- support multiple instances per one plugin class
- Merge pull request #47 from s-noda/ik_server_publish_default_end_cords ik server publishes posestamped of default-end-coords
- add publish statement of default end coords as posestameped message, frame_id = root-link
- remove needless comments
- Merge branch 'master' of https://github.com/jsk-ros-pkg/jsk_control into ik-server-remote-unused-overwrite
- support jsk_teleop_joy in robot-controller-sample.launch of jsk_ik_server
- remove needless ik-server class definitions
- support other robot, not only staro in robot-controller-sample.launch
- forbit to generate viewer if display missing
- add dependacy on rostes
- remove needless ik-server impl
- add test files and rostest declearation in catkin,cmake and CMakeLists.txt
- remove :cog-convergence-check, :inverse-kinemtiacs-with-error functions
- add sample dir, using spacenav and ik-server, control robot
- add IK_OPTION argument to staro-ik-server-test.launch
- add staro-ik-server.launch
- add IK_OPTION argument to hrp2jsk-ik-server-test.launch
- add additional-ik-options
- added staro specific code for ik-server
- fix usage of cog-convergence-check function, correspond to irtmode.l update
- #9: install moveit_msgs with package.xml for jsk_ik_server
- fix udpate-support-links timing, please call this fucntion after initialization of ik-server
- hand existance check add
- add default-end-coords variable, forbit to use :end-coords statement
- add client_test_with_leg flag, check if support polygon correctly transformed
- fix transformation of support links, convert support polygon to the target coordinate
- fix supprot-link usage, and remove :end-coords
- bug fix, use link name as frame_id
- add configuration dir, but now, not supported yet
- supprot group_name=whole_body, fix-limb='(:rleg :lleg)
- /odom transformation validated without tf
- ik-server transform all coords using robot model and from-id,
- fix name -> link matching, use find-link-from-name funciton
- convert all frame_id to root-link-frame-id slots, if null, convert using robot model
- fix for collision check, add slot variable of defualt collisoin link
- fix the timing of make-convex function, just before call-ik-server
- add some parameter for collision avoidance
- :ik-server-call function support collision-avoidance-link-pair
- all-test.launch add, for test
- added launch/hrp2jsknt-ik-server.launch
- added svn exclude in installation of jsk_ik_server/catkin.cmake
- fix ik-server return joint_State, link names -> joint names
- joint-state message methods check fix, for hydro
- moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION check fix
- bound check for hydro message type change
- assoc hrp2jsknt model hand and wrist
- add link-list arguments, hrp2 model separate into body and hands
- pr2 has no leg limbs
- add some comment, and test programs are changed to use :fix-limbs option
- fix robot link-list slots variable, pr2 had not had gripper links
- remap /solve_ik -> //solve
- fix typo, transfrom -> transform
- multi_dof_joint_States :joint_transforms -> :transform in hydro
- hrp2 ik-server files donot use tf
- multi-6dof-joint-states supported,
- remove viewer arg from :update-joint-states
- comment quaternion usage
- base coords in joint_states, eular angle and quaternion supported
- add slots value ik-server-name and ik-server-service-name to set node name and service name
- add ik-server-call function, this functions can be used just the same as euslisp :fullbody-inverse-kinematics functions
- mv fullbody-ik-client-test.l to test dir and fix some dependancy of test launcher files. please check test launcher files before change configuration
- remove unused require statement
- remove test dependancy from manifest.xml, it's ok? to remove pr2eus and atlashogehoge
- catkinize jsk_ik_server
- make fullbody ik client class for ik server
- add :support-links args, change foot-convex and targe-centroid-pos
- remove unused comment, and some arg name fix
- :fix-limbs '(:limb1 :limb2 .…) supported
- simplyfy :fullbody-ik-main, old versino move to old-ik-server.k
- load only robot model file instead of interface file.
- remove fix-limb-cords slots,
- change ik-server-test.launch for fullbody-ik-client.l
- hrp2jsk-test fucntino add
- change dir configuration, each ik-server.l move to ik-server-impl dir
- add :inverse-kinematics function, causion, to fix pr2 model torso, :torso-fix t :use-torso 0 option needed
- fix ik-server-call function, options has nil list supported
- fix objects usage
- add some test functions
- rename hoge slot variable to hoge
- rename eus-fullbody-ik-ex -> ik-server-util, i think -ex is terrible naming
- remove unused functions
- add old-ik-server, from hrpsys_gazebo_atlas
- change order m -> mm
- joint name convert to string, and robot-model -> cascaded-link
- change euscollada-robot -> robot-model
- add viewer slots in ik-server class, not only irtviewr, but pickview can be used
- remove global variables, usage, generate robot object, and call (ik-server-call :robot )
- move-target, taget-coords, links-list length check add
- change some comment, not so important
- overwrite make-convex function, bacause hrp2 has toe joint
- centroid < convex check add
- additional-weight-list supported,
- bug fix, if target-centrid-pos == null, then not call cog-ceonvergence check
- add base coords to return statement of ik-server
- arrow object in ik-server viewer trach the first coordinamte of target ones
- debug-view flag can be changed
- ik-sever.l validated with fullbody-ik-client.l, but there is a strange change, base link tranformation need to be called twice?(line: 270)
- fullbody-ik-cline.l add, call ik-server with the same argment of euslisp :fullbody-inverse-kinematics functino
- coordinates fix
- fix some key name of ik_request
- add fullbody-inverse-kinematics-service-cb functino, for group_name =:fullbody-inverse-kinematics, not tested
- do not load robot-interface.l , load just model.l
- added hrp2 launch files
- deleted atlas-eus-ik-client.l
- remove arm_navigation_msgs
- add more debug messages
- not load pr2-interface.l, just load model files.
- reverted last commit. added hrp2jsk, hrp2jsknt server programs.
- merge pr2 and atlas ik server
- deleted atlas-eus-ik-client.l : client program is common for all robots.
- use make-foot-convex for humanoid robot
- removed atlas-end-coords.l: this is copy of the file under hrpsys_gazebo_atlas and is not necessary here.
- removed atlas specified files from eus-fullbody-ik-ex.l and ik-server.l
- change fullbody-ik function to class method
- add eus ik server package
- Contributors: Ryohei Ueda, Yohei Kakiuchi, Yusuke Furuta, Kei Okada, Masaki Murooka, Shintaro Noda
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknts-ik-server-test.launch
- test/atlas-ik-server-test.launch
- test/pr2-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
CHANGELOG
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
0.1.5 (2015-01-08)
- pass warnp as argument in :fullbody-ik-main
- remove sample robot test
- Merge branch 'master' into update-samplerobot-in-ik-server
- use unix:usleep because hrpsys stops clock
- use hrpsys sample robot for ik server
- Contributors: JSK Lab Member, leus, Yusuke Furuta
0.1.4 (2014-10-21)
- support hrp2jsknts in ik-server
- adding hrp2w-ik-server.l
0.1.3 (2014-10-10)
- add ik-server wait function, in travis, ik-server is slow to start
- install euslisp in share directory
- change ik-server files all exectable
- add :ik-server-name args, smaple robot has name with - charactre
- forbit to use copy-object of link cascoords object
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use singleton class to maintain view point of rviz to have persistency across several plugins
- support multiple instances per one plugin class
- Merge pull request #47 from s-noda/ik_server_publish_default_end_cords ik server publishes posestamped of default-end-coords
- add publish statement of default end coords as posestameped message, frame_id = root-link
- remove needless comments
- Merge branch 'master' of https://github.com/jsk-ros-pkg/jsk_control into ik-server-remote-unused-overwrite
- support jsk_teleop_joy in robot-controller-sample.launch of jsk_ik_server
- remove needless ik-server class definitions
- support other robot, not only staro in robot-controller-sample.launch
- forbit to generate viewer if display missing
- add dependacy on rostes
- remove needless ik-server impl
- add test files and rostest declearation in catkin,cmake and CMakeLists.txt
- remove :cog-convergence-check, :inverse-kinemtiacs-with-error functions
- add sample dir, using spacenav and ik-server, control robot
- add IK_OPTION argument to staro-ik-server-test.launch
- add staro-ik-server.launch
- add IK_OPTION argument to hrp2jsk-ik-server-test.launch
- add additional-ik-options
- added staro specific code for ik-server
- fix usage of cog-convergence-check function, correspond to irtmode.l update
- #9: install moveit_msgs with package.xml for jsk_ik_server
- fix udpate-support-links timing, please call this fucntion after initialization of ik-server
- hand existance check add
- add default-end-coords variable, forbit to use :end-coords statement
- add client_test_with_leg flag, check if support polygon correctly transformed
- fix transformation of support links, convert support polygon to the target coordinate
- fix supprot-link usage, and remove :end-coords
- bug fix, use link name as frame_id
- add configuration dir, but now, not supported yet
- supprot group_name=whole_body, fix-limb='(:rleg :lleg)
- /odom transformation validated without tf
- ik-server transform all coords using robot model and from-id,
- fix name -> link matching, use find-link-from-name funciton
- convert all frame_id to root-link-frame-id slots, if null, convert using robot model
- fix for collision check, add slot variable of defualt collisoin link
- fix the timing of make-convex function, just before call-ik-server
- add some parameter for collision avoidance
- :ik-server-call function support collision-avoidance-link-pair
- all-test.launch add, for test
- added launch/hrp2jsknt-ik-server.launch
- added svn exclude in installation of jsk_ik_server/catkin.cmake
- fix ik-server return joint_State, link names -> joint names
- joint-state message methods check fix, for hydro
- moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION check fix
- bound check for hydro message type change
- assoc hrp2jsknt model hand and wrist
- add link-list arguments, hrp2 model separate into body and hands
- pr2 has no leg limbs
- add some comment, and test programs are changed to use :fix-limbs option
- fix robot link-list slots variable, pr2 had not had gripper links
- remap /solve_ik -> //solve
- fix typo, transfrom -> transform
- multi_dof_joint_States :joint_transforms -> :transform in hydro
- hrp2 ik-server files donot use tf
- multi-6dof-joint-states supported,
- remove viewer arg from :update-joint-states
- comment quaternion usage
- base coords in joint_states, eular angle and quaternion supported
- add slots value ik-server-name and ik-server-service-name to set node name and service name
- add ik-server-call function, this functions can be used just the same as euslisp :fullbody-inverse-kinematics functions
- mv fullbody-ik-client-test.l to test dir and fix some dependancy of test launcher files. please check test launcher files before change configuration
- remove unused require statement
- remove test dependancy from manifest.xml, it's ok? to remove pr2eus and atlashogehoge
- catkinize jsk_ik_server
- make fullbody ik client class for ik server
- add :support-links args, change foot-convex and targe-centroid-pos
- remove unused comment, and some arg name fix
- :fix-limbs '(:limb1 :limb2 .…) supported
- simplyfy :fullbody-ik-main, old versino move to old-ik-server.k
- load only robot model file instead of interface file.
- remove fix-limb-cords slots,
- change ik-server-test.launch for fullbody-ik-client.l
- hrp2jsk-test fucntino add
- change dir configuration, each ik-server.l move to ik-server-impl dir
- add :inverse-kinematics function, causion, to fix pr2 model torso, :torso-fix t :use-torso 0 option needed
- fix ik-server-call function, options has nil list supported
- fix objects usage
- add some test functions
- rename hoge slot variable to hoge
- rename eus-fullbody-ik-ex -> ik-server-util, i think -ex is terrible naming
- remove unused functions
- add old-ik-server, from hrpsys_gazebo_atlas
- change order m -> mm
- joint name convert to string, and robot-model -> cascaded-link
- change euscollada-robot -> robot-model
- add viewer slots in ik-server class, not only irtviewr, but pickview can be used
- remove global variables, usage, generate robot object, and call (ik-server-call :robot )
- move-target, taget-coords, links-list length check add
- change some comment, not so important
- overwrite make-convex function, bacause hrp2 has toe joint
- centroid < convex check add
- additional-weight-list supported,
- bug fix, if target-centrid-pos == null, then not call cog-ceonvergence check
- add base coords to return statement of ik-server
- arrow object in ik-server viewer trach the first coordinamte of target ones
- debug-view flag can be changed
- ik-sever.l validated with fullbody-ik-client.l, but there is a strange change, base link tranformation need to be called twice?(line: 270)
- fullbody-ik-cline.l add, call ik-server with the same argment of euslisp :fullbody-inverse-kinematics functino
- coordinates fix
- fix some key name of ik_request
- add fullbody-inverse-kinematics-service-cb functino, for group_name =:fullbody-inverse-kinematics, not tested
- do not load robot-interface.l , load just model.l
- added hrp2 launch files
- deleted atlas-eus-ik-client.l
- remove arm_navigation_msgs
- add more debug messages
- not load pr2-interface.l, just load model files.
- reverted last commit. added hrp2jsk, hrp2jsknt server programs.
- merge pr2 and atlas ik server
- deleted atlas-eus-ik-client.l : client program is common for all robots.
- use make-foot-convex for humanoid robot
- removed atlas-end-coords.l: this is copy of the file under hrpsys_gazebo_atlas and is not necessary here.
- removed atlas specified files from eus-fullbody-ik-ex.l and ik-server.l
- change fullbody-ik function to class method
- add eus ik server package
- Contributors: Ryohei Ueda, Yohei Kakiuchi, Yusuke Furuta, Kei Okada, Masaki Murooka, Shintaro Noda
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| drc_task_common |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknts-ik-server-test.launch
- test/atlas-ik-server-test.launch
- test/pr2-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
CHANGELOG
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
0.1.5 (2015-01-08)
- pass warnp as argument in :fullbody-ik-main
- remove sample robot test
- Merge branch 'master' into update-samplerobot-in-ik-server
- use unix:usleep because hrpsys stops clock
- use hrpsys sample robot for ik server
- Contributors: JSK Lab Member, leus, Yusuke Furuta
0.1.4 (2014-10-21)
- support hrp2jsknts in ik-server
- adding hrp2w-ik-server.l
0.1.3 (2014-10-10)
- add ik-server wait function, in travis, ik-server is slow to start
- install euslisp in share directory
- change ik-server files all exectable
- add :ik-server-name args, smaple robot has name with - charactre
- forbit to use copy-object of link cascoords object
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use singleton class to maintain view point of rviz to have persistency across several plugins
- support multiple instances per one plugin class
- Merge pull request #47 from s-noda/ik_server_publish_default_end_cords ik server publishes posestamped of default-end-coords
- add publish statement of default end coords as posestameped message, frame_id = root-link
- remove needless comments
- Merge branch 'master' of https://github.com/jsk-ros-pkg/jsk_control into ik-server-remote-unused-overwrite
- support jsk_teleop_joy in robot-controller-sample.launch of jsk_ik_server
- remove needless ik-server class definitions
- support other robot, not only staro in robot-controller-sample.launch
- forbit to generate viewer if display missing
- add dependacy on rostes
- remove needless ik-server impl
- add test files and rostest declearation in catkin,cmake and CMakeLists.txt
- remove :cog-convergence-check, :inverse-kinemtiacs-with-error functions
- add sample dir, using spacenav and ik-server, control robot
- add IK_OPTION argument to staro-ik-server-test.launch
- add staro-ik-server.launch
- add IK_OPTION argument to hrp2jsk-ik-server-test.launch
- add additional-ik-options
- added staro specific code for ik-server
- fix usage of cog-convergence-check function, correspond to irtmode.l update
- #9: install moveit_msgs with package.xml for jsk_ik_server
- fix udpate-support-links timing, please call this fucntion after initialization of ik-server
- hand existance check add
- add default-end-coords variable, forbit to use :end-coords statement
- add client_test_with_leg flag, check if support polygon correctly transformed
- fix transformation of support links, convert support polygon to the target coordinate
- fix supprot-link usage, and remove :end-coords
- bug fix, use link name as frame_id
- add configuration dir, but now, not supported yet
- supprot group_name=whole_body, fix-limb='(:rleg :lleg)
- /odom transformation validated without tf
- ik-server transform all coords using robot model and from-id,
- fix name -> link matching, use find-link-from-name funciton
- convert all frame_id to root-link-frame-id slots, if null, convert using robot model
- fix for collision check, add slot variable of defualt collisoin link
- fix the timing of make-convex function, just before call-ik-server
- add some parameter for collision avoidance
- :ik-server-call function support collision-avoidance-link-pair
- all-test.launch add, for test
- added launch/hrp2jsknt-ik-server.launch
- added svn exclude in installation of jsk_ik_server/catkin.cmake
- fix ik-server return joint_State, link names -> joint names
- joint-state message methods check fix, for hydro
- moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION check fix
- bound check for hydro message type change
- assoc hrp2jsknt model hand and wrist
- add link-list arguments, hrp2 model separate into body and hands
- pr2 has no leg limbs
- add some comment, and test programs are changed to use :fix-limbs option
- fix robot link-list slots variable, pr2 had not had gripper links
- remap /solve_ik -> //solve
- fix typo, transfrom -> transform
- multi_dof_joint_States :joint_transforms -> :transform in hydro
- hrp2 ik-server files donot use tf
- multi-6dof-joint-states supported,
- remove viewer arg from :update-joint-states
- comment quaternion usage
- base coords in joint_states, eular angle and quaternion supported
- add slots value ik-server-name and ik-server-service-name to set node name and service name
- add ik-server-call function, this functions can be used just the same as euslisp :fullbody-inverse-kinematics functions
- mv fullbody-ik-client-test.l to test dir and fix some dependancy of test launcher files. please check test launcher files before change configuration
- remove unused require statement
- remove test dependancy from manifest.xml, it's ok? to remove pr2eus and atlashogehoge
- catkinize jsk_ik_server
- make fullbody ik client class for ik server
- add :support-links args, change foot-convex and targe-centroid-pos
- remove unused comment, and some arg name fix
- :fix-limbs '(:limb1 :limb2 .…) supported
- simplyfy :fullbody-ik-main, old versino move to old-ik-server.k
- load only robot model file instead of interface file.
- remove fix-limb-cords slots,
- change ik-server-test.launch for fullbody-ik-client.l
- hrp2jsk-test fucntino add
- change dir configuration, each ik-server.l move to ik-server-impl dir
- add :inverse-kinematics function, causion, to fix pr2 model torso, :torso-fix t :use-torso 0 option needed
- fix ik-server-call function, options has nil list supported
- fix objects usage
- add some test functions
- rename hoge slot variable to hoge
- rename eus-fullbody-ik-ex -> ik-server-util, i think -ex is terrible naming
- remove unused functions
- add old-ik-server, from hrpsys_gazebo_atlas
- change order m -> mm
- joint name convert to string, and robot-model -> cascaded-link
- change euscollada-robot -> robot-model
- add viewer slots in ik-server class, not only irtviewr, but pickview can be used
- remove global variables, usage, generate robot object, and call (ik-server-call :robot )
- move-target, taget-coords, links-list length check add
- change some comment, not so important
- overwrite make-convex function, bacause hrp2 has toe joint
- centroid < convex check add
- additional-weight-list supported,
- bug fix, if target-centrid-pos == null, then not call cog-ceonvergence check
- add base coords to return statement of ik-server
- arrow object in ik-server viewer trach the first coordinamte of target ones
- debug-view flag can be changed
- ik-sever.l validated with fullbody-ik-client.l, but there is a strange change, base link tranformation need to be called twice?(line: 270)
- fullbody-ik-cline.l add, call ik-server with the same argment of euslisp :fullbody-inverse-kinematics functino
- coordinates fix
- fix some key name of ik_request
- add fullbody-inverse-kinematics-service-cb functino, for group_name =:fullbody-inverse-kinematics, not tested
- do not load robot-interface.l , load just model.l
- added hrp2 launch files
- deleted atlas-eus-ik-client.l
- remove arm_navigation_msgs
- add more debug messages
- not load pr2-interface.l, just load model files.
- reverted last commit. added hrp2jsk, hrp2jsknt server programs.
- merge pr2 and atlas ik server
- deleted atlas-eus-ik-client.l : client program is common for all robots.
- use make-foot-convex for humanoid robot
- removed atlas-end-coords.l: this is copy of the file under hrpsys_gazebo_atlas and is not necessary here.
- removed atlas specified files from eus-fullbody-ik-ex.l and ik-server.l
- change fullbody-ik function to class method
- add eus ik server package
- Contributors: Ryohei Ueda, Yohei Kakiuchi, Yusuke Furuta, Kei Okada, Masaki Murooka, Shintaro Noda
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknts-ik-server-test.launch
- test/atlas-ik-server-test.launch
- test/pr2-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
CHANGELOG
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
0.1.5 (2015-01-08)
- pass warnp as argument in :fullbody-ik-main
- remove sample robot test
- Merge branch 'master' into update-samplerobot-in-ik-server
- use unix:usleep because hrpsys stops clock
- use hrpsys sample robot for ik server
- Contributors: JSK Lab Member, leus, Yusuke Furuta
0.1.4 (2014-10-21)
- support hrp2jsknts in ik-server
- adding hrp2w-ik-server.l
0.1.3 (2014-10-10)
- add ik-server wait function, in travis, ik-server is slow to start
- install euslisp in share directory
- change ik-server files all exectable
- add :ik-server-name args, smaple robot has name with - charactre
- forbit to use copy-object of link cascoords object
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use singleton class to maintain view point of rviz to have persistency across several plugins
- support multiple instances per one plugin class
- Merge pull request #47 from s-noda/ik_server_publish_default_end_cords ik server publishes posestamped of default-end-coords
- add publish statement of default end coords as posestameped message, frame_id = root-link
- remove needless comments
- Merge branch 'master' of https://github.com/jsk-ros-pkg/jsk_control into ik-server-remote-unused-overwrite
- support jsk_teleop_joy in robot-controller-sample.launch of jsk_ik_server
- remove needless ik-server class definitions
- support other robot, not only staro in robot-controller-sample.launch
- forbit to generate viewer if display missing
- add dependacy on rostes
- remove needless ik-server impl
- add test files and rostest declearation in catkin,cmake and CMakeLists.txt
- remove :cog-convergence-check, :inverse-kinemtiacs-with-error functions
- add sample dir, using spacenav and ik-server, control robot
- add IK_OPTION argument to staro-ik-server-test.launch
- add staro-ik-server.launch
- add IK_OPTION argument to hrp2jsk-ik-server-test.launch
- add additional-ik-options
- added staro specific code for ik-server
- fix usage of cog-convergence-check function, correspond to irtmode.l update
- #9: install moveit_msgs with package.xml for jsk_ik_server
- fix udpate-support-links timing, please call this fucntion after initialization of ik-server
- hand existance check add
- add default-end-coords variable, forbit to use :end-coords statement
- add client_test_with_leg flag, check if support polygon correctly transformed
- fix transformation of support links, convert support polygon to the target coordinate
- fix supprot-link usage, and remove :end-coords
- bug fix, use link name as frame_id
- add configuration dir, but now, not supported yet
- supprot group_name=whole_body, fix-limb='(:rleg :lleg)
- /odom transformation validated without tf
- ik-server transform all coords using robot model and from-id,
- fix name -> link matching, use find-link-from-name funciton
- convert all frame_id to root-link-frame-id slots, if null, convert using robot model
- fix for collision check, add slot variable of defualt collisoin link
- fix the timing of make-convex function, just before call-ik-server
- add some parameter for collision avoidance
- :ik-server-call function support collision-avoidance-link-pair
- all-test.launch add, for test
- added launch/hrp2jsknt-ik-server.launch
- added svn exclude in installation of jsk_ik_server/catkin.cmake
- fix ik-server return joint_State, link names -> joint names
- joint-state message methods check fix, for hydro
- moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION check fix
- bound check for hydro message type change
- assoc hrp2jsknt model hand and wrist
- add link-list arguments, hrp2 model separate into body and hands
- pr2 has no leg limbs
- add some comment, and test programs are changed to use :fix-limbs option
- fix robot link-list slots variable, pr2 had not had gripper links
- remap /solve_ik -> //solve
- fix typo, transfrom -> transform
- multi_dof_joint_States :joint_transforms -> :transform in hydro
- hrp2 ik-server files donot use tf
- multi-6dof-joint-states supported,
- remove viewer arg from :update-joint-states
- comment quaternion usage
- base coords in joint_states, eular angle and quaternion supported
- add slots value ik-server-name and ik-server-service-name to set node name and service name
- add ik-server-call function, this functions can be used just the same as euslisp :fullbody-inverse-kinematics functions
- mv fullbody-ik-client-test.l to test dir and fix some dependancy of test launcher files. please check test launcher files before change configuration
- remove unused require statement
- remove test dependancy from manifest.xml, it's ok? to remove pr2eus and atlashogehoge
- catkinize jsk_ik_server
- make fullbody ik client class for ik server
- add :support-links args, change foot-convex and targe-centroid-pos
- remove unused comment, and some arg name fix
- :fix-limbs '(:limb1 :limb2 .…) supported
- simplyfy :fullbody-ik-main, old versino move to old-ik-server.k
- load only robot model file instead of interface file.
- remove fix-limb-cords slots,
- change ik-server-test.launch for fullbody-ik-client.l
- hrp2jsk-test fucntino add
- change dir configuration, each ik-server.l move to ik-server-impl dir
- add :inverse-kinematics function, causion, to fix pr2 model torso, :torso-fix t :use-torso 0 option needed
- fix ik-server-call function, options has nil list supported
- fix objects usage
- add some test functions
- rename hoge slot variable to hoge
- rename eus-fullbody-ik-ex -> ik-server-util, i think -ex is terrible naming
- remove unused functions
- add old-ik-server, from hrpsys_gazebo_atlas
- change order m -> mm
- joint name convert to string, and robot-model -> cascaded-link
- change euscollada-robot -> robot-model
- add viewer slots in ik-server class, not only irtviewr, but pickview can be used
- remove global variables, usage, generate robot object, and call (ik-server-call :robot )
- move-target, taget-coords, links-list length check add
- change some comment, not so important
- overwrite make-convex function, bacause hrp2 has toe joint
- centroid < convex check add
- additional-weight-list supported,
- bug fix, if target-centrid-pos == null, then not call cog-ceonvergence check
- add base coords to return statement of ik-server
- arrow object in ik-server viewer trach the first coordinamte of target ones
- debug-view flag can be changed
- ik-sever.l validated with fullbody-ik-client.l, but there is a strange change, base link tranformation need to be called twice?(line: 270)
- fullbody-ik-cline.l add, call ik-server with the same argment of euslisp :fullbody-inverse-kinematics functino
- coordinates fix
- fix some key name of ik_request
- add fullbody-inverse-kinematics-service-cb functino, for group_name =:fullbody-inverse-kinematics, not tested
- do not load robot-interface.l , load just model.l
- added hrp2 launch files
- deleted atlas-eus-ik-client.l
- remove arm_navigation_msgs
- add more debug messages
- not load pr2-interface.l, just load model files.
- reverted last commit. added hrp2jsk, hrp2jsknt server programs.
- merge pr2 and atlas ik server
- deleted atlas-eus-ik-client.l : client program is common for all robots.
- use make-foot-convex for humanoid robot
- removed atlas-end-coords.l: this is copy of the file under hrpsys_gazebo_atlas and is not necessary here.
- removed atlas specified files from eus-fullbody-ik-ex.l and ik-server.l
- change fullbody-ik function to class method
- add eus ik server package
- Contributors: Ryohei Ueda, Yohei Kakiuchi, Yusuke Furuta, Kei Okada, Masaki Murooka, Shintaro Noda
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknts-ik-server-test.launch
- test/atlas-ik-server-test.launch
- test/pr2-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
CHANGELOG
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
0.1.5 (2015-01-08)
- pass warnp as argument in :fullbody-ik-main
- remove sample robot test
- Merge branch 'master' into update-samplerobot-in-ik-server
- use unix:usleep because hrpsys stops clock
- use hrpsys sample robot for ik server
- Contributors: JSK Lab Member, leus, Yusuke Furuta
0.1.4 (2014-10-21)
- support hrp2jsknts in ik-server
- adding hrp2w-ik-server.l
0.1.3 (2014-10-10)
- add ik-server wait function, in travis, ik-server is slow to start
- install euslisp in share directory
- change ik-server files all exectable
- add :ik-server-name args, smaple robot has name with - charactre
- forbit to use copy-object of link cascoords object
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use singleton class to maintain view point of rviz to have persistency across several plugins
- support multiple instances per one plugin class
- Merge pull request #47 from s-noda/ik_server_publish_default_end_cords ik server publishes posestamped of default-end-coords
- add publish statement of default end coords as posestameped message, frame_id = root-link
- remove needless comments
- Merge branch 'master' of https://github.com/jsk-ros-pkg/jsk_control into ik-server-remote-unused-overwrite
- support jsk_teleop_joy in robot-controller-sample.launch of jsk_ik_server
- remove needless ik-server class definitions
- support other robot, not only staro in robot-controller-sample.launch
- forbit to generate viewer if display missing
- add dependacy on rostes
- remove needless ik-server impl
- add test files and rostest declearation in catkin,cmake and CMakeLists.txt
- remove :cog-convergence-check, :inverse-kinemtiacs-with-error functions
- add sample dir, using spacenav and ik-server, control robot
- add IK_OPTION argument to staro-ik-server-test.launch
- add staro-ik-server.launch
- add IK_OPTION argument to hrp2jsk-ik-server-test.launch
- add additional-ik-options
- added staro specific code for ik-server
- fix usage of cog-convergence-check function, correspond to irtmode.l update
- #9: install moveit_msgs with package.xml for jsk_ik_server
- fix udpate-support-links timing, please call this fucntion after initialization of ik-server
- hand existance check add
- add default-end-coords variable, forbit to use :end-coords statement
- add client_test_with_leg flag, check if support polygon correctly transformed
- fix transformation of support links, convert support polygon to the target coordinate
- fix supprot-link usage, and remove :end-coords
- bug fix, use link name as frame_id
- add configuration dir, but now, not supported yet
- supprot group_name=whole_body, fix-limb='(:rleg :lleg)
- /odom transformation validated without tf
- ik-server transform all coords using robot model and from-id,
- fix name -> link matching, use find-link-from-name funciton
- convert all frame_id to root-link-frame-id slots, if null, convert using robot model
- fix for collision check, add slot variable of defualt collisoin link
- fix the timing of make-convex function, just before call-ik-server
- add some parameter for collision avoidance
- :ik-server-call function support collision-avoidance-link-pair
- all-test.launch add, for test
- added launch/hrp2jsknt-ik-server.launch
- added svn exclude in installation of jsk_ik_server/catkin.cmake
- fix ik-server return joint_State, link names -> joint names
- joint-state message methods check fix, for hydro
- moveit_msgs::MoveItErrorCodes::NO_IK_SOLUTION check fix
- bound check for hydro message type change
- assoc hrp2jsknt model hand and wrist
- add link-list arguments, hrp2 model separate into body and hands
- pr2 has no leg limbs
- add some comment, and test programs are changed to use :fix-limbs option
- fix robot link-list slots variable, pr2 had not had gripper links
- remap /solve_ik -> //solve
- fix typo, transfrom -> transform
- multi_dof_joint_States :joint_transforms -> :transform in hydro
- hrp2 ik-server files donot use tf
- multi-6dof-joint-states supported,
- remove viewer arg from :update-joint-states
- comment quaternion usage
- base coords in joint_states, eular angle and quaternion supported
- add slots value ik-server-name and ik-server-service-name to set node name and service name
- add ik-server-call function, this functions can be used just the same as euslisp :fullbody-inverse-kinematics functions
- mv fullbody-ik-client-test.l to test dir and fix some dependancy of test launcher files. please check test launcher files before change configuration
- remove unused require statement
- remove test dependancy from manifest.xml, it's ok? to remove pr2eus and atlashogehoge
- catkinize jsk_ik_server
- make fullbody ik client class for ik server
- add :support-links args, change foot-convex and targe-centroid-pos
- remove unused comment, and some arg name fix
- :fix-limbs '(:limb1 :limb2 .…) supported
- simplyfy :fullbody-ik-main, old versino move to old-ik-server.k
- load only robot model file instead of interface file.
- remove fix-limb-cords slots,
- change ik-server-test.launch for fullbody-ik-client.l
- hrp2jsk-test fucntino add
- change dir configuration, each ik-server.l move to ik-server-impl dir
- add :inverse-kinematics function, causion, to fix pr2 model torso, :torso-fix t :use-torso 0 option needed
- fix ik-server-call function, options has nil list supported
- fix objects usage
- add some test functions
- rename hoge slot variable to hoge
- rename eus-fullbody-ik-ex -> ik-server-util, i think -ex is terrible naming
- remove unused functions
- add old-ik-server, from hrpsys_gazebo_atlas
- change order m -> mm
- joint name convert to string, and robot-model -> cascaded-link
- change euscollada-robot -> robot-model
- add viewer slots in ik-server class, not only irtviewr, but pickview can be used
- remove global variables, usage, generate robot object, and call (ik-server-call :robot )
- move-target, taget-coords, links-list length check add
- change some comment, not so important
- overwrite make-convex function, bacause hrp2 has toe joint
- centroid < convex check add
- additional-weight-list supported,
- bug fix, if target-centrid-pos == null, then not call cog-ceonvergence check
- add base coords to return statement of ik-server
- arrow object in ik-server viewer trach the first coordinamte of target ones
- debug-view flag can be changed
- ik-sever.l validated with fullbody-ik-client.l, but there is a strange change, base link tranformation need to be called twice?(line: 270)
- fullbody-ik-cline.l add, call ik-server with the same argment of euslisp :fullbody-inverse-kinematics functino
- coordinates fix
- fix some key name of ik_request
- add fullbody-inverse-kinematics-service-cb functino, for group_name =:fullbody-inverse-kinematics, not tested
- do not load robot-interface.l , load just model.l
- added hrp2 launch files
- deleted atlas-eus-ik-client.l
- remove arm_navigation_msgs
- add more debug messages
- not load pr2-interface.l, just load model files.
- reverted last commit. added hrp2jsk, hrp2jsknt server programs.
- merge pr2 and atlas ik server
- deleted atlas-eus-ik-client.l : client program is common for all robots.
- use make-foot-convex for humanoid robot
- removed atlas-end-coords.l: this is copy of the file under hrpsys_gazebo_atlas and is not necessary here.
- removed atlas specified files from eus-fullbody-ik-ex.l and ik-server.l
- change fullbody-ik function to class method
- add eus ik server package
- Contributors: Ryohei Ueda, Yohei Kakiuchi, Yusuke Furuta, Kei Okada, Masaki Murooka, Shintaro Noda
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknts-ik-server-test.launch
- test/atlas-ik-server-test.launch
- test/pr2-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.