
Package Summary
| Tags | No category tags. |
| Version | 0.6.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-15 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl
![]()
![]()
![]()
Package summary
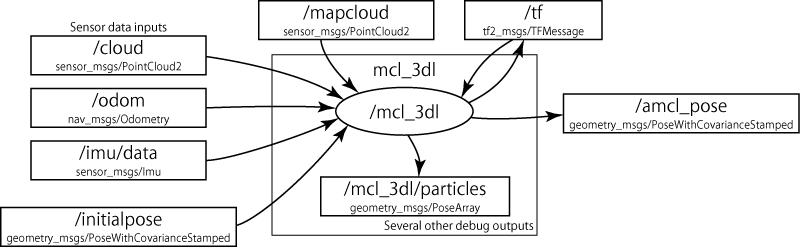
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn’t implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test3.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test3.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.

MarkerArray shows several mcl_3dl internal information.
- Purple spheres: sampled points used in the likelihood-model calculation
- Red lines: casted rays in the beam-model calculation
- Red boxes: detected collisions in raycasting
To try global localization, call /global_localization by the following command.
rosservice call /global_localization
Demos without odometry and without IMU are also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Changelog for package mcl_3dl
0.6.4 (2024-10-10)
- Fix angular part of covariance matrix (#417)
- Contributors: f-fl0
0.6.3 (2024-07-22)
- Explicitly handle zero sigma (#414)
- Update assets to v0.6.4 (#413)
- Update assets to v0.6.3 (#412)
- Update assets to v0.6.2 (#411)
- Contributors: Atsushi Watanabe
0.6.2 (2023-11-14)
- Fix reported entropy (#408)
- Update assets to v0.6.1 (#407)
- Update assets to v0.6.0 (#406)
- Update assets to v0.5.2 (#405)
- Update assets to v0.5.1 (#404)
- Update assets to v0.4.2 (#402)
- Contributors: Atsushi Watanabe, f-fl0
0.6.1 (2023-01-04)
- Update assets to v0.4.1 (#400)
- Support PCL 1.11 and later (#397)
- Update assets to v0.4.0 (#395)
- Update assets to v0.3.4 (#392)
- Remove old workarounds for PCL<1.8 (#389)
- Update assets to v0.3.3 (#388)
- Update assets to v0.3.2 (#387)
- Update code format (#386)
- Contributors: Atsushi Watanabe
0.6.0 (2021-05-12)
- Add option to load cloud through "load_pcd" service (#381)
- Update assets to v0.3.1 (#382)
- Update assets to v0.3.0 (#380)
- Update assets to v0.2.0 (#379)
- Contributors: Atsushi Watanabe, Remco
0.5.4 (2021-03-07)
0.5.3 (2021-02-26)
- Fix cloud accum reset on map update (#371)
- Contributors: Atsushi Watanabe
0.5.2 (2021-01-15)
- Fix potential "Time is out of dual 32-bit range" error (#367)
- Update assets to v0.1.4 (#365)
- Improve test stability (#363)
- Update assets to v0.1.3 (#362)
- Update assets to v0.1.2 (#361)
- Migrate to GitHub Actions (#357)
- Update assets to v0.0.10 (#356)
- Contributors: Atsushi Watanabe
0.5.1 (2020-10-26)
- Make hit_range independent from grid size and fix DDA hit/miss state (#350)
- Fix crushing when lidar poses are out of map (#351)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.5.0 (2020-10-15)
- Fix crushing when new map is received (#347)
- Ease condition for test of PointCloudSamplerWithNormal (#344)
- Add faster raycast algorithm using DDA (#343)
- Contributors: Naotaka Hatao
0.4.0 (2020-10-07)
0.3.0 (2020-09-07)
- Switch beam model by map label field (#334)
- Update test script for latest catkin (#333)
- Remove references to sensor_msgs::PointCloud (#332)
- Update assets to v0.0.9 (#331)
- Improve expansion resetting/global localization test stability (#330)
- Fix global localization test parameter (#328)
- Avoid rate limit when fetching gh-ph-comment (#329)
- Update gh-pr-comment (#327)
- Retry codecov script download (#326)
- Improve test coverage (#325)
- Merge rostest coverage profiles (#324)
- Contributors: Atsushi Watanabe, f-fl0
0.2.5 (2020-05-27)
- Add validation for orientation of initial pose (#317)
- Update CI scripts (#318)
- Contributors: Atsushi Watanabe, Yuta Koga
0.2.4 (2020-05-08)
- Fix resampling failure of last particle (#313)
- Retry gpg keyserver on prerelease test (#312)
- Add filter class for Vec3 (#311)
- Refactor math functions (#310)
- Fix deprecation warning (#309)
- Split parameter loader code (#307)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.2.3 (2020-04-07)
- Update assets to v0.0.8 (#303)
- Fix flaky rostest nodes (#302)
- Update E2E test parameters (#301)
- Refactor CI scripts (#300)
- Add Noetic CI job (#296)
- Fix initialization of accumulated cloud header (#299)
- Support Noetic (#297)
- Contributors: Atsushi Watanabe
0.2.2 (2020-03-30)
- Make average number of accumulated clouds accurate (#293)
- Fix latching flag in demo bag (#294)
- Fix cloud accumulation logic (#290)
- Contributors: Atsushi Watanabe
0.2.1 (2020-02-03)
- Set DiagnosticStatus::OK as default (#283)
- Update assets to v0.0.7 (#282)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.2.0 (2020-01-18)
- Install consistent version of ros_buildfarm (#281)
- Run prerelease test with latest msgs package (#278)
- Expose internal errors and convergence status (#265)
- Document motion prediction model parameters (#277)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.1.7 (2020-01-06)
- Update assets to v0.0.6 (#273)
- Update assets to v0.0.5 (#272)
- Add catkin/bloom release actions (#269)
- Fix codecov setting (#270)
- Fix codecov config (#268)
- Migrate C math functions to C++ (#267)
- Enable particle initialization using covariances (#259)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.6 (2019-10-21)
- Clear odometry integration error on global localization (#257)
- Accelerate CI and prerelease test (#254)
- Contributors: Atsushi Watanabe
0.1.5 (2019-08-15)
- Split prerelease test job to avoid CI time-limit (#251)
- Speed-up covariance calculation during global localization (#248)
- Run prerelease test on release preparation PR (#246)
- Add a test for landmark measurement (#242)
- Add test case for expansion resetting service (#241)
- Test matched/unmatched debug outputs (#240)
- Add basic tests for State6DOF class (#239)
- Fix demo configuration and update README (#238)
- Add no-imu and no-odometry modes (#234)
- Add test case for obsolated compatibility mode (#237)
- Fix document file permission (#236)
- Add test for compatibility level check (#235)
- Fix ParticleFilter::resample() (#233)
- Drop ROS Indigo and Ubuntu Trusty support (#230)
- Disable CI build for indigo (#229)
- Refactor motion prediction models (#227)
- Refactor IMU measurement models (#226)
- Fix include directory priority (#225)
- Custom point type (#206)
- Fix transform object constness (#224)
- Add LICENSE file (#220)
- Add post-release test script (#218)
- Reduce memcpy in point cloud transform (#216)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.4 (2018-12-20)
- Fix IO figure (#212)
- Fix tf timestamp (#214)
- Add pf::ParticleFilter::appendParticle (#207)
- Fix pointer alignment style (#210)
- Migrate tf to tf2 (#208)
- Fix class member naming style (#205)
- Make lidar measurement model class (#195)
- Add I/O diagram to the document (#199)
- Update Algorithms.md (#198)
- Add apt-get upgrade to test Dockerfiles (#197)
- Add document for expansion resetting (#193)
- Add test for expansion resetting (#192)
- Add test for global localization (#188)
- Refactor likelihood calculation (#189)
- Add a comment to test_transform_failure (#184)
- Build mcl_3dl_msgs from source on CI (#185)
- Fix resampling (#183)
- Fix test failure on ROS buildfarm (#181)
- Fix catkin package definitions (#180)
- Add tf exception handling and change message level (#177)
- Relax codecov patch threshold (#179)
- Allow small coverage drop (#178)
- Fix test names (#176)
- Add build id to CI bot comment (#174)
- Fold CI bot comment (#173)
- Decrease bag playback rate in integration test (#172)
- Add test for NormalLikelihoodNd (#171)
- Report coverage only after successful test (#170)
- Add CI badges (#169)
- Add codecov covarage test (#168)
- Fix bot comment target slug (#167)
- Contributors: Atsushi Watanabe, So Jomura
0.1.3 (2018-06-23)
- Fix install of demo launch and config (#164)
- Update CI and add test on ROS Melodic (#155)
- Ignore gh-pr-comment failure (#162)
- Compile with PCL_NO_PRECOMPILE (#161)
- Fix rostest dependency (#160)
- Fix roslint dependency (#159)
- Update install instructions in README (#158)
- Update manifest format and fix CMakeLists (#157)
- Use mcl_3dl_msgs package (#152)
- Test with shadow-fixed repository (#154)
- Update CI bot environments (#150)
- Add encrypted token for image caching (#149)
- Fix migration instruction message (#147)
- Fix match ratio min/max check (#146)
- Add interfaces to ChunkedKdtree for external usages (#145)
- Install headers (#143)
- Contributors: Atsushi Watanabe
0.1.2 (2018-04-27)
- Workaround for debian stretch build (#140)
- Contributors: Atsushi Watanabe
0.1.1 (2018-04-25)
0.1.0 (2018-04-23)
- Migrate to ROS recommended namespace model (#130)
- Minor CI setting updates (#129)
- Fix package deps (#127)
- Fix dockerfile style (#125)
- Load CI cache from docker hub registry
(#124)
- also add build matrix
- Add raycast performance benchmark (#123)
- Fix GLOBAL_LOCALIZATION status (#122)
- Add localization status output (#120)
- Fix nodehandle usage (#121)
- Update demo without odometry
(#119)
- Update demo without odometry
- Update README
- Add document of the demo without odometry
- Move sample parameters in launch into yamls (#72)
- Fix time jump back
(#117)
- Fix time jump back
- Add warning of time jump
- Fix tf error check
- Add unit tests for Raycast
(#116)
- Add unit tests for Raycast
- Fix raycast grid handling
- Chunked kd-tree
(#113)
- Add chunked kd-tree to remove map truncation
- Remove unused params
- Remove unused debug output
- Add unit test for ChunkedKdtree
- Update test reference checksum (#114)
- Fix raycast collision tolerance
(#112)
- Tolerance of the end of the raycast was too small in 1a758c0 because of the increase of the search range.
- Add integral angular odometry error constraint (#111)
- Fix raycast (#110)
- Hit was checked by using range search with (grid/2.0) which make a lot of miss detection. (sqrt(2.0) * grid / 2.0) should be good approximation.
- Add rule based expansion resetting (#109)
- Fix integral odom error debug output (#108)
- Add landmark measurement input (#107)
- Fix map update timer (#105)
- Fix CI bot (#104)
- Fix repository url
- Use pip version of the bot
- Remove spinOnce polling and waitForTransform
(#102)
- Use ros::Timer instead of ros::spinOnce polling
- Remove waitForTransform for static transforms
- Remove waitForTransform for buffered (delayed) objects
- Fix particle initialization (#101)
- Reset integral odometry error if jumped (#100)
- Add constraint on the integral of odometry error
(#99)
- odom_err_integ_tc: time constant to hold the integral of the odometry error
- odom_err_integ_sigma: acceptable range of the integral of the odometry error
- Visualize sampled points and raycasting result
(#97)
- Visualize sampled points and raycasting result
- Remove duplicated code around raycasting
- Fix raycasting accuracy (#96)
- Fix odometry noise function in prediction (#95)
- Add global localization (#91)
- Fix particle resize
(#92)
- same fix as #90
- Fix resampling for huge particle size
(#90)
- All-zero particles have appeared on resampling if the particle size is very large.
- Also, add iterator.
- Add test for pf::ParticleFilter. (#89)
- Build test with -Wall -Werror.
(#88)
- Build test with -Wall -Werror.
- Workaround for invalid macro name bug in PCL(<1.8.1).
- Fix odometry noise function.
(#87)
- wrong: [nd(mean = 1.0, sigma = sigma_trans_trans) * nd(mean = 1.0, sigma = sigma_rot_trans)]{.title-ref}
- corrected: [nd(mean = 0.0, sigma = sigma_trans_trans) + nd(mean = 0.0, sigma = sigma_rot_trans)]{.title-ref}
- Skip random points sampling if all points are filtered out. (#86)
- Fix build on indigo. (#84)
- Add map_clip_far param. (#85)
- Support variable particle size.
(#78)
- Support variable particle size.
- Add service to change particle size.
- Add test for resizeParticle.
- Check input cloud size.
(#82)
- Check for empty cloud to avoid failure on kdtree build.
- Fix usage of point size of pcl::PointCloud.
- Remove debug outputs. (#81)
- Use online version of test result comment bot. (#80)
- Fix const function attributes. (#77)
- Remove dummy dep to system_lib. (#76)
- Add unit tests for mathematical classes.
(#74)
- Add unit tests for Vec3, Quat, NormalLikelihood, Filter classes.
- Fix scaling of the NormalLikelihood distribution.
- Fix Filter::set in angle mode.
- Fix naming styles.
(#73)
- Names of the classes and their members now get compatible with ROS recommended coding styles.
- Public member variables are kept without underscore postfix.
- Fix package install. (#71)
- Fix assert of sampled point amount check. (#70)
- Fix quaternion average and use expectation as estimation result. (#67)
- Fix bot's test result posting on fail. (#68)
- Include test result on bot post. (#66)
- Fix a bug where all particle probabilities get zero.
(#65)
- fix number of selected points for likelihood calculation
- add error recovering / asserts
- fixes coding styles (#64)
- adds parameter to accumulate input clouds (#60)
- syncs tf timestamp with last odometry (#61)
- adds example without odometry (#57)
- updates default params and demo (#55)
- adds option to disable tf publish and test for tf output (#46)
- adds test result notifier bot (#53)
- fixes possibly invalid memory access (#52)
- changes docker storage driver to overlay2 (#51)
- adds pcd file output of all pointcloud (#50)
- limits minimum beam_model likelihood (#49)
- separates point ranges of beam model and fixes total ref reduction (#48)
- makes acc measurement variance configurable (#47)
- fixes published tf timestamps to have a future date (#45)
- fixes docker caching on travis (#43)
- updates default parameters (#42)
- adds debug visualization output of casted ray (#41)
- fixes total reflection reduction (#40)
- rejects total reflection points in beam_model (#37)
- fixes test result handling and playback rate (#38)
- ignores travis run on non-master branch (#36)
- caches test dataset outside of docker
(#34)
- caches test dataset outside docker
- changes script path
- adds travis settings for a test in docker container (#33)
- adds localization accuracy test (#32)
- makes beam_model likelihood configurable (#30)
- removes ad-hoc map filter (#27)
- updates sample launch file
(#28)
- The commit enables:
- IMU measurement
- loading map from pcd file
- The commit enables:
- adds imu measurement (#26)
- adds hysteresis on final estimation (#24)
- updates parameters in sample launch file
(#23)
- removes map offset parameters
- specifies jump detection distance
- fixes axis-angle value range (#22)
- updates parameters in sample launch file (#19)
- fixes odometry error parameter handling (#18)
- fixes beam_model raycast origin (#17)
- adds parameter to specify odometry error
- adds sample launch file
(#14)
- This fixes #3.
- A dataset for testing will be supplied in future.
- adds documentation (#10)
- fixes init_yaw/pitch/roll setting (#12)
- ad hoc fix to a bug on PCL-1.7 with C++11
- fixes #9
- adds matched/unmatched pointclouds output (#7)
- fixes filter resetting in angular mode
- This commit fixes #2.
- makes map clipping parameters configurable
- fixes roll and pitch motion in prediction phase
- adds /amcl_pose output
- This commit fixes #1.
- applies LPF on debugging output pointcloud coordinate
- changes default map frame to 'map' instead of 'map_ground'
- outsources map update
- adds beam model
- makes z clipping parameters configurable
- adds parameter to skip measurement
- reduces almost invisible points in map
- checks localization covariance on map update
- detects pose jump and reset LPF
- makes some parameters configurable
- adds covariance calculation
- uses rpy variance instead of quat
- supports jump back
- fixes PointRepresentation dimension
- speed up by using radiusSearch instead of nearestKSearch
- improves prediction phase
- adds flexible particle operators
- removes garbage semicolons
- makes matching related parameters configurable
- makes several parameters configurable
- adds output filter
- adds weight in matching
- adds some parameters
- reduces number of points of updated map cloud
- adds particleBase::operator+
- clips and updates maps
- adds vec3::operator*
- adds arg to specify sigma to resampling
- avoids memory access error in max()
- supports tf and initialpose
- supports quat::inverse
- supports vec3::operator-
- updates test parameters
- update map cloud
- accumulates clouds
- fixes resampling
- first test version
- Contributors: Atsushi Watanabe
Wiki Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- without_imu [default: false]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noimu.yaml]
Messages
Services
Plugins
Recent questions tagged mcl_3dl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.6.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-15 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl
![]()
![]()
![]()
Package summary
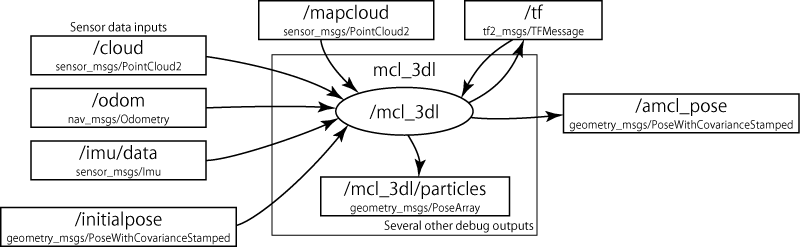
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn’t implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test3.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test3.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.
MarkerArray shows several mcl_3dl internal information.
- Purple spheres: sampled points used in the likelihood-model calculation
- Red lines: casted rays in the beam-model calculation
- Red boxes: detected collisions in raycasting
To try global localization, call /global_localization by the following command.
rosservice call /global_localization
Demos without odometry and without IMU are also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Changelog for package mcl_3dl
0.6.4 (2024-10-10)
- Fix angular part of covariance matrix (#417)
- Contributors: f-fl0
0.6.3 (2024-07-22)
- Explicitly handle zero sigma (#414)
- Update assets to v0.6.4 (#413)
- Update assets to v0.6.3 (#412)
- Update assets to v0.6.2 (#411)
- Contributors: Atsushi Watanabe
0.6.2 (2023-11-14)
- Fix reported entropy (#408)
- Update assets to v0.6.1 (#407)
- Update assets to v0.6.0 (#406)
- Update assets to v0.5.2 (#405)
- Update assets to v0.5.1 (#404)
- Update assets to v0.4.2 (#402)
- Contributors: Atsushi Watanabe, f-fl0
0.6.1 (2023-01-04)
- Update assets to v0.4.1 (#400)
- Support PCL 1.11 and later (#397)
- Update assets to v0.4.0 (#395)
- Update assets to v0.3.4 (#392)
- Remove old workarounds for PCL<1.8 (#389)
- Update assets to v0.3.3 (#388)
- Update assets to v0.3.2 (#387)
- Update code format (#386)
- Contributors: Atsushi Watanabe
0.6.0 (2021-05-12)
- Add option to load cloud through "load_pcd" service (#381)
- Update assets to v0.3.1 (#382)
- Update assets to v0.3.0 (#380)
- Update assets to v0.2.0 (#379)
- Contributors: Atsushi Watanabe, Remco
0.5.4 (2021-03-07)
0.5.3 (2021-02-26)
- Fix cloud accum reset on map update (#371)
- Contributors: Atsushi Watanabe
0.5.2 (2021-01-15)
- Fix potential "Time is out of dual 32-bit range" error (#367)
- Update assets to v0.1.4 (#365)
- Improve test stability (#363)
- Update assets to v0.1.3 (#362)
- Update assets to v0.1.2 (#361)
- Migrate to GitHub Actions (#357)
- Update assets to v0.0.10 (#356)
- Contributors: Atsushi Watanabe
0.5.1 (2020-10-26)
- Make hit_range independent from grid size and fix DDA hit/miss state (#350)
- Fix crushing when lidar poses are out of map (#351)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.5.0 (2020-10-15)
- Fix crushing when new map is received (#347)
- Ease condition for test of PointCloudSamplerWithNormal (#344)
- Add faster raycast algorithm using DDA (#343)
- Contributors: Naotaka Hatao
0.4.0 (2020-10-07)
0.3.0 (2020-09-07)
- Switch beam model by map label field (#334)
- Update test script for latest catkin (#333)
- Remove references to sensor_msgs::PointCloud (#332)
- Update assets to v0.0.9 (#331)
- Improve expansion resetting/global localization test stability (#330)
- Fix global localization test parameter (#328)
- Avoid rate limit when fetching gh-ph-comment (#329)
- Update gh-pr-comment (#327)
- Retry codecov script download (#326)
- Improve test coverage (#325)
- Merge rostest coverage profiles (#324)
- Contributors: Atsushi Watanabe, f-fl0
0.2.5 (2020-05-27)
- Add validation for orientation of initial pose (#317)
- Update CI scripts (#318)
- Contributors: Atsushi Watanabe, Yuta Koga
0.2.4 (2020-05-08)
- Fix resampling failure of last particle (#313)
- Retry gpg keyserver on prerelease test (#312)
- Add filter class for Vec3 (#311)
- Refactor math functions (#310)
- Fix deprecation warning (#309)
- Split parameter loader code (#307)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.2.3 (2020-04-07)
- Update assets to v0.0.8 (#303)
- Fix flaky rostest nodes (#302)
- Update E2E test parameters (#301)
- Refactor CI scripts (#300)
- Add Noetic CI job (#296)
- Fix initialization of accumulated cloud header (#299)
- Support Noetic (#297)
- Contributors: Atsushi Watanabe
0.2.2 (2020-03-30)
- Make average number of accumulated clouds accurate (#293)
- Fix latching flag in demo bag (#294)
- Fix cloud accumulation logic (#290)
- Contributors: Atsushi Watanabe
0.2.1 (2020-02-03)
- Set DiagnosticStatus::OK as default (#283)
- Update assets to v0.0.7 (#282)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.2.0 (2020-01-18)
- Install consistent version of ros_buildfarm (#281)
- Run prerelease test with latest msgs package (#278)
- Expose internal errors and convergence status (#265)
- Document motion prediction model parameters (#277)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.1.7 (2020-01-06)
- Update assets to v0.0.6 (#273)
- Update assets to v0.0.5 (#272)
- Add catkin/bloom release actions (#269)
- Fix codecov setting (#270)
- Fix codecov config (#268)
- Migrate C math functions to C++ (#267)
- Enable particle initialization using covariances (#259)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.6 (2019-10-21)
- Clear odometry integration error on global localization (#257)
- Accelerate CI and prerelease test (#254)
- Contributors: Atsushi Watanabe
0.1.5 (2019-08-15)
- Split prerelease test job to avoid CI time-limit (#251)
- Speed-up covariance calculation during global localization (#248)
- Run prerelease test on release preparation PR (#246)
- Add a test for landmark measurement (#242)
- Add test case for expansion resetting service (#241)
- Test matched/unmatched debug outputs (#240)
- Add basic tests for State6DOF class (#239)
- Fix demo configuration and update README (#238)
- Add no-imu and no-odometry modes (#234)
- Add test case for obsolated compatibility mode (#237)
- Fix document file permission (#236)
- Add test for compatibility level check (#235)
- Fix ParticleFilter::resample() (#233)
- Drop ROS Indigo and Ubuntu Trusty support (#230)
- Disable CI build for indigo (#229)
- Refactor motion prediction models (#227)
- Refactor IMU measurement models (#226)
- Fix include directory priority (#225)
- Custom point type (#206)
- Fix transform object constness (#224)
- Add LICENSE file (#220)
- Add post-release test script (#218)
- Reduce memcpy in point cloud transform (#216)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.4 (2018-12-20)
- Fix IO figure (#212)
- Fix tf timestamp (#214)
- Add pf::ParticleFilter::appendParticle (#207)
- Fix pointer alignment style (#210)
- Migrate tf to tf2 (#208)
- Fix class member naming style (#205)
- Make lidar measurement model class (#195)
- Add I/O diagram to the document (#199)
- Update Algorithms.md (#198)
- Add apt-get upgrade to test Dockerfiles (#197)
- Add document for expansion resetting (#193)
- Add test for expansion resetting (#192)
- Add test for global localization (#188)
- Refactor likelihood calculation (#189)
- Add a comment to test_transform_failure (#184)
- Build mcl_3dl_msgs from source on CI (#185)
- Fix resampling (#183)
- Fix test failure on ROS buildfarm (#181)
- Fix catkin package definitions (#180)
- Add tf exception handling and change message level (#177)
- Relax codecov patch threshold (#179)
- Allow small coverage drop (#178)
- Fix test names (#176)
- Add build id to CI bot comment (#174)
- Fold CI bot comment (#173)
- Decrease bag playback rate in integration test (#172)
- Add test for NormalLikelihoodNd (#171)
- Report coverage only after successful test (#170)
- Add CI badges (#169)
- Add codecov covarage test (#168)
- Fix bot comment target slug (#167)
- Contributors: Atsushi Watanabe, So Jomura
0.1.3 (2018-06-23)
- Fix install of demo launch and config (#164)
- Update CI and add test on ROS Melodic (#155)
- Ignore gh-pr-comment failure (#162)
- Compile with PCL_NO_PRECOMPILE (#161)
- Fix rostest dependency (#160)
- Fix roslint dependency (#159)
- Update install instructions in README (#158)
- Update manifest format and fix CMakeLists (#157)
- Use mcl_3dl_msgs package (#152)
- Test with shadow-fixed repository (#154)
- Update CI bot environments (#150)
- Add encrypted token for image caching (#149)
- Fix migration instruction message (#147)
- Fix match ratio min/max check (#146)
- Add interfaces to ChunkedKdtree for external usages (#145)
- Install headers (#143)
- Contributors: Atsushi Watanabe
0.1.2 (2018-04-27)
- Workaround for debian stretch build (#140)
- Contributors: Atsushi Watanabe
0.1.1 (2018-04-25)
0.1.0 (2018-04-23)
- Migrate to ROS recommended namespace model (#130)
- Minor CI setting updates (#129)
- Fix package deps (#127)
- Fix dockerfile style (#125)
- Load CI cache from docker hub registry
(#124)
- also add build matrix
- Add raycast performance benchmark (#123)
- Fix GLOBAL_LOCALIZATION status (#122)
- Add localization status output (#120)
- Fix nodehandle usage (#121)
- Update demo without odometry
(#119)
- Update demo without odometry
- Update README
- Add document of the demo without odometry
- Move sample parameters in launch into yamls (#72)
- Fix time jump back
(#117)
- Fix time jump back
- Add warning of time jump
- Fix tf error check
- Add unit tests for Raycast
(#116)
- Add unit tests for Raycast
- Fix raycast grid handling
- Chunked kd-tree
(#113)
- Add chunked kd-tree to remove map truncation
- Remove unused params
- Remove unused debug output
- Add unit test for ChunkedKdtree
- Update test reference checksum (#114)
- Fix raycast collision tolerance
(#112)
- Tolerance of the end of the raycast was too small in 1a758c0 because of the increase of the search range.
- Add integral angular odometry error constraint (#111)
- Fix raycast (#110)
- Hit was checked by using range search with (grid/2.0) which make a lot of miss detection. (sqrt(2.0) * grid / 2.0) should be good approximation.
- Add rule based expansion resetting (#109)
- Fix integral odom error debug output (#108)
- Add landmark measurement input (#107)
- Fix map update timer (#105)
- Fix CI bot (#104)
- Fix repository url
- Use pip version of the bot
- Remove spinOnce polling and waitForTransform
(#102)
- Use ros::Timer instead of ros::spinOnce polling
- Remove waitForTransform for static transforms
- Remove waitForTransform for buffered (delayed) objects
- Fix particle initialization (#101)
- Reset integral odometry error if jumped (#100)
- Add constraint on the integral of odometry error
(#99)
- odom_err_integ_tc: time constant to hold the integral of the odometry error
- odom_err_integ_sigma: acceptable range of the integral of the odometry error
- Visualize sampled points and raycasting result
(#97)
- Visualize sampled points and raycasting result
- Remove duplicated code around raycasting
- Fix raycasting accuracy (#96)
- Fix odometry noise function in prediction (#95)
- Add global localization (#91)
- Fix particle resize
(#92)
- same fix as #90
- Fix resampling for huge particle size
(#90)
- All-zero particles have appeared on resampling if the particle size is very large.
- Also, add iterator.
- Add test for pf::ParticleFilter. (#89)
- Build test with -Wall -Werror.
(#88)
- Build test with -Wall -Werror.
- Workaround for invalid macro name bug in PCL(<1.8.1).
- Fix odometry noise function.
(#87)
- wrong: [nd(mean = 1.0, sigma = sigma_trans_trans) * nd(mean = 1.0, sigma = sigma_rot_trans)]{.title-ref}
- corrected: [nd(mean = 0.0, sigma = sigma_trans_trans) + nd(mean = 0.0, sigma = sigma_rot_trans)]{.title-ref}
- Skip random points sampling if all points are filtered out. (#86)
- Fix build on indigo. (#84)
- Add map_clip_far param. (#85)
- Support variable particle size.
(#78)
- Support variable particle size.
- Add service to change particle size.
- Add test for resizeParticle.
- Check input cloud size.
(#82)
- Check for empty cloud to avoid failure on kdtree build.
- Fix usage of point size of pcl::PointCloud.
- Remove debug outputs. (#81)
- Use online version of test result comment bot. (#80)
- Fix const function attributes. (#77)
- Remove dummy dep to system_lib. (#76)
- Add unit tests for mathematical classes.
(#74)
- Add unit tests for Vec3, Quat, NormalLikelihood, Filter classes.
- Fix scaling of the NormalLikelihood distribution.
- Fix Filter::set in angle mode.
- Fix naming styles.
(#73)
- Names of the classes and their members now get compatible with ROS recommended coding styles.
- Public member variables are kept without underscore postfix.
- Fix package install. (#71)
- Fix assert of sampled point amount check. (#70)
- Fix quaternion average and use expectation as estimation result. (#67)
- Fix bot's test result posting on fail. (#68)
- Include test result on bot post. (#66)
- Fix a bug where all particle probabilities get zero.
(#65)
- fix number of selected points for likelihood calculation
- add error recovering / asserts
- fixes coding styles (#64)
- adds parameter to accumulate input clouds (#60)
- syncs tf timestamp with last odometry (#61)
- adds example without odometry (#57)
- updates default params and demo (#55)
- adds option to disable tf publish and test for tf output (#46)
- adds test result notifier bot (#53)
- fixes possibly invalid memory access (#52)
- changes docker storage driver to overlay2 (#51)
- adds pcd file output of all pointcloud (#50)
- limits minimum beam_model likelihood (#49)
- separates point ranges of beam model and fixes total ref reduction (#48)
- makes acc measurement variance configurable (#47)
- fixes published tf timestamps to have a future date (#45)
- fixes docker caching on travis (#43)
- updates default parameters (#42)
- adds debug visualization output of casted ray (#41)
- fixes total reflection reduction (#40)
- rejects total reflection points in beam_model (#37)
- fixes test result handling and playback rate (#38)
- ignores travis run on non-master branch (#36)
- caches test dataset outside of docker
(#34)
- caches test dataset outside docker
- changes script path
- adds travis settings for a test in docker container (#33)
- adds localization accuracy test (#32)
- makes beam_model likelihood configurable (#30)
- removes ad-hoc map filter (#27)
- updates sample launch file
(#28)
- The commit enables:
- IMU measurement
- loading map from pcd file
- The commit enables:
- adds imu measurement (#26)
- adds hysteresis on final estimation (#24)
- updates parameters in sample launch file
(#23)
- removes map offset parameters
- specifies jump detection distance
- fixes axis-angle value range (#22)
- updates parameters in sample launch file (#19)
- fixes odometry error parameter handling (#18)
- fixes beam_model raycast origin (#17)
- adds parameter to specify odometry error
- adds sample launch file
(#14)
- This fixes #3.
- A dataset for testing will be supplied in future.
- adds documentation (#10)
- fixes init_yaw/pitch/roll setting (#12)
- ad hoc fix to a bug on PCL-1.7 with C++11
- fixes #9
- adds matched/unmatched pointclouds output (#7)
- fixes filter resetting in angular mode
- This commit fixes #2.
- makes map clipping parameters configurable
- fixes roll and pitch motion in prediction phase
- adds /amcl_pose output
- This commit fixes #1.
- applies LPF on debugging output pointcloud coordinate
- changes default map frame to 'map' instead of 'map_ground'
- outsources map update
- adds beam model
- makes z clipping parameters configurable
- adds parameter to skip measurement
- reduces almost invisible points in map
- checks localization covariance on map update
- detects pose jump and reset LPF
- makes some parameters configurable
- adds covariance calculation
- uses rpy variance instead of quat
- supports jump back
- fixes PointRepresentation dimension
- speed up by using radiusSearch instead of nearestKSearch
- improves prediction phase
- adds flexible particle operators
- removes garbage semicolons
- makes matching related parameters configurable
- makes several parameters configurable
- adds output filter
- adds weight in matching
- adds some parameters
- reduces number of points of updated map cloud
- adds particleBase::operator+
- clips and updates maps
- adds vec3::operator*
- adds arg to specify sigma to resampling
- avoids memory access error in max()
- supports tf and initialpose
- supports quat::inverse
- supports vec3::operator-
- updates test parameters
- update map cloud
- accumulates clouds
- fixes resampling
- first test version
- Contributors: Atsushi Watanabe
Wiki Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- without_imu [default: false]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noimu.yaml]
Messages
Services
Plugins
Recent questions tagged mcl_3dl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-05-21 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl

![]()
![]()
Package summary
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn’t implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.
MarkerArray shows several mcl_3dl internal information.
- Purple spheres: sampled points used in the likelihood-model calculation
- Red lines: casted rays in the beam-model calculation
- Red boxes: detected collisions in raycasting
A demo without odometry is also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Changelog for package mcl_3dl
0.1.4 (2018-12-20)
- Fix IO figure (#212)
- Fix tf timestamp (#214)
- Add pf::ParticleFilter::appendParticle (#207)
- Fix pointer alignment style (#210)
- Migrate tf to tf2 (#208)
- Fix class member naming style (#205)
- Make lidar measurement model class (#195)
- Add I/O diagram to the document (#199)
- Update Algorithms.md (#198)
- Add apt-get upgrade to test Dockerfiles (#197)
- Add document for expansion resetting (#193)
- Add test for expansion resetting (#192)
- Add test for global localization (#188)
- Refactor likelihood calculation (#189)
- Add a comment to test_transform_failure (#184)
- Build mcl_3dl_msgs from source on CI (#185)
- Fix resampling (#183)
- Fix test failure on ROS buildfarm (#181)
- Fix catkin package definitions (#180)
- Add tf exception handling and change message level (#177)
- Relax codecov patch threshold (#179)
- Allow small coverage drop (#178)
- Fix test names (#176)
- Add build id to CI bot comment (#174)
- Fold CI bot comment (#173)
- Decrease bag playback rate in integration test (#172)
- Add test for NormalLikelihoodNd (#171)
- Report coverage only after successful test (#170)
- Add CI badges (#169)
- Add codecov covarage test (#168)
- Fix bot comment target slug (#167)
- Contributors: Atsushi Watanabe, So Jomura
0.1.3 (2018-06-23)
- Fix install of demo launch and config (#164)
- Update CI and add test on ROS Melodic (#155)
- Ignore gh-pr-comment failure (#162)
- Compile with PCL_NO_PRECOMPILE (#161)
- Fix rostest dependency (#160)
- Fix roslint dependency (#159)
- Update install instructions in README (#158)
- Update manifest format and fix CMakeLists (#157)
- Use mcl_3dl_msgs package (#152)
- Test with shadow-fixed repository (#154)
- Update CI bot environments (#150)
- Add encrypted token for image caching (#149)
- Fix migration instruction message (#147)
- Fix match ratio min/max check (#146)
- Add interfaces to ChunkedKdtree for external usages (#145)
- Install headers (#143)
- Contributors: Atsushi Watanabe
0.1.2 (2018-04-27)
- Workaround for debian stretch build (#140)
- Contributors: Atsushi Watanabe
0.1.1 (2018-04-25)
0.1.0 (2018-04-23)
- Migrate to ROS recommended namespace model (#130)
- Minor CI setting updates (#129)
- Fix package deps (#127)
- Fix dockerfile style (#125)
- Load CI cache from docker hub registry
(#124)
- also add build matrix
- Add raycast performance benchmark (#123)
- Fix GLOBAL_LOCALIZATION status (#122)
- Add localization status output (#120)
- Fix nodehandle usage (#121)
- Update demo without odometry
(#119)
- Update demo without odometry
- Update README
- Add document of the demo without odometry
- Move sample parameters in launch into yamls (#72)
- Fix time jump back
(#117)
- Fix time jump back
- Add warning of time jump
- Fix tf error check
- Add unit tests for Raycast
(#116)
- Add unit tests for Raycast
- Fix raycast grid handling
- Chunked kd-tree
(#113)
- Add chunked kd-tree to remove map truncation
- Remove unused params
- Remove unused debug output
- Add unit test for ChunkedKdtree
- Update test reference checksum (#114)
- Fix raycast collision tolerance
(#112)
- Tolerance of the end of the raycast was too small in 1a758c0 because of the increase of the search range.
- Add integral angular odometry error constraint (#111)
- Fix raycast (#110)
- Hit was checked by using range search with (grid/2.0) which make a lot of miss detection. (sqrt(2.0) * grid / 2.0) should be good approximation.
- Add rule based expansion resetting (#109)
- Fix integral odom error debug output (#108)
- Add landmark measurement input (#107)
- Fix map update timer (#105)
- Fix CI bot (#104)
- Fix repository url
- Use pip version of the bot
- Remove spinOnce polling and waitForTransform
(#102)
- Use ros::Timer instead of ros::spinOnce polling
- Remove waitForTransform for static transforms
- Remove waitForTransform for buffered (delayed) objects
- Fix particle initialization (#101)
- Reset integral odometry error if jumped (#100)
- Add constraint on the integral of odometry error
(#99)
- odom_err_integ_tc: time constant to hold the integral of the odometry error
- odom_err_integ_sigma: acceptable range of the integral of the odometry error
- Visualize sampled points and raycasting result
(#97)
- Visualize sampled points and raycasting result
- Remove duplicated code around raycasting
- Fix raycasting accuracy (#96)
- Fix odometry noise function in prediction (#95)
- Add global localization (#91)
- Fix particle resize
(#92)
- same fix as #90
- Fix resampling for huge particle size
(#90)
- All-zero particles have appeared on resampling if the particle size is very large.
- Also, add iterator.
- Add test for pf::ParticleFilter. (#89)
- Build test with -Wall -Werror.
(#88)
- Build test with -Wall -Werror.
- Workaround for invalid macro name bug in PCL(<1.8.1).
- Fix odometry noise function.
(#87)
- wrong: [nd(mean = 1.0, sigma = sigma_trans_trans) * nd(mean = 1.0, sigma = sigma_rot_trans)]{.title-ref}
- corrected: [nd(mean = 0.0, sigma = sigma_trans_trans) + nd(mean = 0.0, sigma = sigma_rot_trans)]{.title-ref}
- Skip random points sampling if all points are filtered out. (#86)
- Fix build on indigo. (#84)
- Add map_clip_far param. (#85)
- Support variable particle size.
(#78)
- Support variable particle size.
- Add service to change particle size.
- Add test for resizeParticle.
- Check input cloud size.
(#82)
- Check for empty cloud to avoid failure on kdtree build.
- Fix usage of point size of pcl::PointCloud.
- Remove debug outputs. (#81)
- Use online version of test result comment bot. (#80)
- Fix const function attributes. (#77)
- Remove dummy dep to system_lib. (#76)
- Add unit tests for mathematical classes.
(#74)
- Add unit tests for Vec3, Quat, NormalLikelihood, Filter classes.
- Fix scaling of the NormalLikelihood distribution.
- Fix Filter::set in angle mode.
- Fix naming styles.
(#73)
- Names of the classes and their members now get compatible with ROS recommended coding styles.
- Public member variables are kept without underscore postfix.
- Fix package install. (#71)
- Fix assert of sampled point amount check. (#70)
- Fix quaternion average and use expectation as estimation result. (#67)
- Fix bot's test result posting on fail. (#68)
- Include test result on bot post. (#66)
- Fix a bug where all particle probabilities get zero.
(#65)
- fix number of selected points for likelihood calculation
- add error recovering / asserts
- fixes coding styles (#64)
- adds parameter to accumulate input clouds (#60)
- syncs tf timestamp with last odometry (#61)
- adds example without odometry (#57)
- updates default params and demo (#55)
- adds option to disable tf publish and test for tf output (#46)
- adds test result notifier bot (#53)
- fixes possibly invalid memory access (#52)
- changes docker storage driver to overlay2 (#51)
- adds pcd file output of all pointcloud (#50)
- limits minimum beam_model likelihood (#49)
- separates point ranges of beam model and fixes total ref reduction (#48)
- makes acc measurement variance configurable (#47)
- fixes published tf timestamps to have a future date (#45)
- fixes docker caching on travis (#43)
- updates default parameters (#42)
- adds debug visualization output of casted ray (#41)
- fixes total reflection reduction (#40)
- rejects total reflection points in beam_model (#37)
- fixes test result handling and playback rate (#38)
- ignores travis run on non-master branch (#36)
- caches test dataset outside of docker
(#34)
- caches test dataset outside docker
- changes script path
- adds travis settings for a test in docker container (#33)
- adds localization accuracy test (#32)
- makes beam_model likelihood configurable (#30)
- removes ad-hoc map filter (#27)
- updates sample launch file
(#28)
- The commit enables:
- IMU measurement
- loading map from pcd file
- The commit enables:
- adds imu measurement (#26)
- adds hysteresis on final estimation (#24)
- updates parameters in sample launch file
(#23)
- removes map offset parameters
- specifies jump detection distance
- fixes axis-angle value range (#22)
- updates parameters in sample launch file (#19)
- fixes odometry error parameter handling (#18)
- fixes beam_model raycast origin (#17)
- adds parameter to specify odometry error
- adds sample launch file
(#14)
- This fixes #3.
- A dataset for testing will be supplied in future.
- adds documentation (#10)
- fixes init_yaw/pitch/roll setting (#12)
- ad hoc fix to a bug on PCL-1.7 with C++11
- fixes #9
- adds matched/unmatched pointclouds output (#7)
- fixes filter resetting in angular mode
- This commit fixes #2.
- makes map clipping parameters configurable
- fixes roll and pitch motion in prediction phase
- adds /amcl_pose output
- This commit fixes #1.
- applies LPF on debugging output pointcloud coordinate
- changes default map frame to 'map' instead of 'map_ground'
- outsources map update
- adds beam model
- makes z clipping parameters configurable
- adds parameter to skip measurement
- reduces almost invisible points in map
- checks localization covariance on map update
- detects pose jump and reset LPF
- makes some parameters configurable
- adds covariance calculation
- uses rpy variance instead of quat
- supports jump back
- fixes PointRepresentation dimension
- speed up by using radiusSearch instead of nearestKSearch
- improves prediction phase
- adds flexible particle operators
- removes garbage semicolons
- makes matching related parameters configurable
- makes several parameters configurable
- adds output filter
- adds weight in matching
- adds some parameters
- reduces number of points of updated map cloud
- adds particleBase::operator+
- clips and updates maps
- adds vec3::operator*
- adds arg to specify sigma to resampling
- avoids memory access error in max()
- supports tf and initialpose
- supports quat::inverse
- supports vec3::operator-
- updates test parameters
- update map cloud
- accumulates clouds
- fixes resampling
- first test version
- Contributors: Atsushi Watanabe
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| rostest | |
| rosunit | |
| roscpp | |
| geometry_msgs | |
| nav_msgs | |
| pcl_ros | |
| sensor_msgs | |
| std_msgs | |
| std_srvs | |
| tf2 | |
| tf2_geometry_msgs | |
| tf2_ros | |
| tf2_sensor_msgs | |
| visualization_msgs | |
| mcl_3dl_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
Messages
Services
Plugins
Recent questions tagged mcl_3dl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.6.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-15 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl
![]()
![]()
![]()
Package summary
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn’t implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test3.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test3.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.
MarkerArray shows several mcl_3dl internal information.
- Purple spheres: sampled points used in the likelihood-model calculation
- Red lines: casted rays in the beam-model calculation
- Red boxes: detected collisions in raycasting
To try global localization, call /global_localization by the following command.
rosservice call /global_localization
Demos without odometry and without IMU are also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Changelog for package mcl_3dl
0.6.4 (2024-10-10)
- Fix angular part of covariance matrix (#417)
- Contributors: f-fl0
0.6.3 (2024-07-22)
- Explicitly handle zero sigma (#414)
- Update assets to v0.6.4 (#413)
- Update assets to v0.6.3 (#412)
- Update assets to v0.6.2 (#411)
- Contributors: Atsushi Watanabe
0.6.2 (2023-11-14)
- Fix reported entropy (#408)
- Update assets to v0.6.1 (#407)
- Update assets to v0.6.0 (#406)
- Update assets to v0.5.2 (#405)
- Update assets to v0.5.1 (#404)
- Update assets to v0.4.2 (#402)
- Contributors: Atsushi Watanabe, f-fl0
0.6.1 (2023-01-04)
- Update assets to v0.4.1 (#400)
- Support PCL 1.11 and later (#397)
- Update assets to v0.4.0 (#395)
- Update assets to v0.3.4 (#392)
- Remove old workarounds for PCL<1.8 (#389)
- Update assets to v0.3.3 (#388)
- Update assets to v0.3.2 (#387)
- Update code format (#386)
- Contributors: Atsushi Watanabe
0.6.0 (2021-05-12)
- Add option to load cloud through "load_pcd" service (#381)
- Update assets to v0.3.1 (#382)
- Update assets to v0.3.0 (#380)
- Update assets to v0.2.0 (#379)
- Contributors: Atsushi Watanabe, Remco
0.5.4 (2021-03-07)
0.5.3 (2021-02-26)
- Fix cloud accum reset on map update (#371)
- Contributors: Atsushi Watanabe
0.5.2 (2021-01-15)
- Fix potential "Time is out of dual 32-bit range" error (#367)
- Update assets to v0.1.4 (#365)
- Improve test stability (#363)
- Update assets to v0.1.3 (#362)
- Update assets to v0.1.2 (#361)
- Migrate to GitHub Actions (#357)
- Update assets to v0.0.10 (#356)
- Contributors: Atsushi Watanabe
0.5.1 (2020-10-26)
- Make hit_range independent from grid size and fix DDA hit/miss state (#350)
- Fix crushing when lidar poses are out of map (#351)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.5.0 (2020-10-15)
- Fix crushing when new map is received (#347)
- Ease condition for test of PointCloudSamplerWithNormal (#344)
- Add faster raycast algorithm using DDA (#343)
- Contributors: Naotaka Hatao
0.4.0 (2020-10-07)
0.3.0 (2020-09-07)
- Switch beam model by map label field (#334)
- Update test script for latest catkin (#333)
- Remove references to sensor_msgs::PointCloud (#332)
- Update assets to v0.0.9 (#331)
- Improve expansion resetting/global localization test stability (#330)
- Fix global localization test parameter (#328)
- Avoid rate limit when fetching gh-ph-comment (#329)
- Update gh-pr-comment (#327)
- Retry codecov script download (#326)
- Improve test coverage (#325)
- Merge rostest coverage profiles (#324)
- Contributors: Atsushi Watanabe, f-fl0
0.2.5 (2020-05-27)
- Add validation for orientation of initial pose (#317)
- Update CI scripts (#318)
- Contributors: Atsushi Watanabe, Yuta Koga
0.2.4 (2020-05-08)
- Fix resampling failure of last particle (#313)
- Retry gpg keyserver on prerelease test (#312)
- Add filter class for Vec3 (#311)
- Refactor math functions (#310)
- Fix deprecation warning (#309)
- Split parameter loader code (#307)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.2.3 (2020-04-07)
- Update assets to v0.0.8 (#303)
- Fix flaky rostest nodes (#302)
- Update E2E test parameters (#301)
- Refactor CI scripts (#300)
- Add Noetic CI job (#296)
- Fix initialization of accumulated cloud header (#299)
- Support Noetic (#297)
- Contributors: Atsushi Watanabe
0.2.2 (2020-03-30)
- Make average number of accumulated clouds accurate (#293)
- Fix latching flag in demo bag (#294)
- Fix cloud accumulation logic (#290)
- Contributors: Atsushi Watanabe
0.2.1 (2020-02-03)
- Set DiagnosticStatus::OK as default (#283)
- Update assets to v0.0.7 (#282)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.2.0 (2020-01-18)
- Install consistent version of ros_buildfarm (#281)
- Run prerelease test with latest msgs package (#278)
- Expose internal errors and convergence status (#265)
- Document motion prediction model parameters (#277)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.1.7 (2020-01-06)
- Update assets to v0.0.6 (#273)
- Update assets to v0.0.5 (#272)
- Add catkin/bloom release actions (#269)
- Fix codecov setting (#270)
- Fix codecov config (#268)
- Migrate C math functions to C++ (#267)
- Enable particle initialization using covariances (#259)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.6 (2019-10-21)
- Clear odometry integration error on global localization (#257)
- Accelerate CI and prerelease test (#254)
- Contributors: Atsushi Watanabe
0.1.5 (2019-08-15)
- Split prerelease test job to avoid CI time-limit (#251)
- Speed-up covariance calculation during global localization (#248)
- Run prerelease test on release preparation PR (#246)
- Add a test for landmark measurement (#242)
- Add test case for expansion resetting service (#241)
- Test matched/unmatched debug outputs (#240)
- Add basic tests for State6DOF class (#239)
- Fix demo configuration and update README (#238)
- Add no-imu and no-odometry modes (#234)
- Add test case for obsolated compatibility mode (#237)
- Fix document file permission (#236)
- Add test for compatibility level check (#235)
- Fix ParticleFilter::resample() (#233)
- Drop ROS Indigo and Ubuntu Trusty support (#230)
- Disable CI build for indigo (#229)
- Refactor motion prediction models (#227)
- Refactor IMU measurement models (#226)
- Fix include directory priority (#225)
- Custom point type (#206)
- Fix transform object constness (#224)
- Add LICENSE file (#220)
- Add post-release test script (#218)
- Reduce memcpy in point cloud transform (#216)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.4 (2018-12-20)
- Fix IO figure (#212)
- Fix tf timestamp (#214)
- Add pf::ParticleFilter::appendParticle (#207)
- Fix pointer alignment style (#210)
- Migrate tf to tf2 (#208)
- Fix class member naming style (#205)
- Make lidar measurement model class (#195)
- Add I/O diagram to the document (#199)
- Update Algorithms.md (#198)
- Add apt-get upgrade to test Dockerfiles (#197)
- Add document for expansion resetting (#193)
- Add test for expansion resetting (#192)
- Add test for global localization (#188)
- Refactor likelihood calculation (#189)
- Add a comment to test_transform_failure (#184)
- Build mcl_3dl_msgs from source on CI (#185)
- Fix resampling (#183)
- Fix test failure on ROS buildfarm (#181)
- Fix catkin package definitions (#180)
- Add tf exception handling and change message level (#177)
- Relax codecov patch threshold (#179)
- Allow small coverage drop (#178)
- Fix test names (#176)
- Add build id to CI bot comment (#174)
- Fold CI bot comment (#173)
- Decrease bag playback rate in integration test (#172)
- Add test for NormalLikelihoodNd (#171)
- Report coverage only after successful test (#170)
- Add CI badges (#169)
- Add codecov covarage test (#168)
- Fix bot comment target slug (#167)
- Contributors: Atsushi Watanabe, So Jomura
0.1.3 (2018-06-23)
- Fix install of demo launch and config (#164)
- Update CI and add test on ROS Melodic (#155)
- Ignore gh-pr-comment failure (#162)
- Compile with PCL_NO_PRECOMPILE (#161)
- Fix rostest dependency (#160)
- Fix roslint dependency (#159)
- Update install instructions in README (#158)
- Update manifest format and fix CMakeLists (#157)
- Use mcl_3dl_msgs package (#152)
- Test with shadow-fixed repository (#154)
- Update CI bot environments (#150)
- Add encrypted token for image caching (#149)
- Fix migration instruction message (#147)
- Fix match ratio min/max check (#146)
- Add interfaces to ChunkedKdtree for external usages (#145)
- Install headers (#143)
- Contributors: Atsushi Watanabe
0.1.2 (2018-04-27)
- Workaround for debian stretch build (#140)
- Contributors: Atsushi Watanabe
0.1.1 (2018-04-25)
0.1.0 (2018-04-23)
- Migrate to ROS recommended namespace model (#130)
- Minor CI setting updates (#129)
- Fix package deps (#127)
- Fix dockerfile style (#125)
- Load CI cache from docker hub registry
(#124)
- also add build matrix
- Add raycast performance benchmark (#123)
- Fix GLOBAL_LOCALIZATION status (#122)
- Add localization status output (#120)
- Fix nodehandle usage (#121)
- Update demo without odometry
(#119)
- Update demo without odometry
- Update README
- Add document of the demo without odometry
- Move sample parameters in launch into yamls (#72)
- Fix time jump back
(#117)
- Fix time jump back
- Add warning of time jump
- Fix tf error check
- Add unit tests for Raycast
(#116)
- Add unit tests for Raycast
- Fix raycast grid handling
- Chunked kd-tree
(#113)
- Add chunked kd-tree to remove map truncation
- Remove unused params
- Remove unused debug output
- Add unit test for ChunkedKdtree
- Update test reference checksum (#114)
- Fix raycast collision tolerance
(#112)
- Tolerance of the end of the raycast was too small in 1a758c0 because of the increase of the search range.
- Add integral angular odometry error constraint (#111)
- Fix raycast (#110)
- Hit was checked by using range search with (grid/2.0) which make a lot of miss detection. (sqrt(2.0) * grid / 2.0) should be good approximation.
- Add rule based expansion resetting (#109)
- Fix integral odom error debug output (#108)
- Add landmark measurement input (#107)
- Fix map update timer (#105)
- Fix CI bot (#104)
- Fix repository url
- Use pip version of the bot
- Remove spinOnce polling and waitForTransform
(#102)
- Use ros::Timer instead of ros::spinOnce polling
- Remove waitForTransform for static transforms
- Remove waitForTransform for buffered (delayed) objects
- Fix particle initialization (#101)
- Reset integral odometry error if jumped (#100)
- Add constraint on the integral of odometry error
(#99)
- odom_err_integ_tc: time constant to hold the integral of the odometry error
- odom_err_integ_sigma: acceptable range of the integral of the odometry error
- Visualize sampled points and raycasting result
(#97)
- Visualize sampled points and raycasting result
- Remove duplicated code around raycasting
- Fix raycasting accuracy (#96)
- Fix odometry noise function in prediction (#95)
- Add global localization (#91)
- Fix particle resize
(#92)
- same fix as #90
- Fix resampling for huge particle size
(#90)
- All-zero particles have appeared on resampling if the particle size is very large.
- Also, add iterator.
- Add test for pf::ParticleFilter. (#89)
- Build test with -Wall -Werror.
(#88)
- Build test with -Wall -Werror.
- Workaround for invalid macro name bug in PCL(<1.8.1).
- Fix odometry noise function.
(#87)
- wrong: [nd(mean = 1.0, sigma = sigma_trans_trans) * nd(mean = 1.0, sigma = sigma_rot_trans)]{.title-ref}
- corrected: [nd(mean = 0.0, sigma = sigma_trans_trans) + nd(mean = 0.0, sigma = sigma_rot_trans)]{.title-ref}
- Skip random points sampling if all points are filtered out. (#86)
- Fix build on indigo. (#84)
- Add map_clip_far param. (#85)
- Support variable particle size.
(#78)
- Support variable particle size.
- Add service to change particle size.
- Add test for resizeParticle.
- Check input cloud size.
(#82)
- Check for empty cloud to avoid failure on kdtree build.
- Fix usage of point size of pcl::PointCloud.
- Remove debug outputs. (#81)
- Use online version of test result comment bot. (#80)
- Fix const function attributes. (#77)
- Remove dummy dep to system_lib. (#76)
- Add unit tests for mathematical classes.
(#74)
- Add unit tests for Vec3, Quat, NormalLikelihood, Filter classes.
- Fix scaling of the NormalLikelihood distribution.
- Fix Filter::set in angle mode.
- Fix naming styles.
(#73)
- Names of the classes and their members now get compatible with ROS recommended coding styles.
- Public member variables are kept without underscore postfix.
- Fix package install. (#71)
- Fix assert of sampled point amount check. (#70)
- Fix quaternion average and use expectation as estimation result. (#67)
- Fix bot's test result posting on fail. (#68)
- Include test result on bot post. (#66)
- Fix a bug where all particle probabilities get zero.
(#65)
- fix number of selected points for likelihood calculation
- add error recovering / asserts
- fixes coding styles (#64)
- adds parameter to accumulate input clouds (#60)
- syncs tf timestamp with last odometry (#61)
- adds example without odometry (#57)
- updates default params and demo (#55)
- adds option to disable tf publish and test for tf output (#46)
- adds test result notifier bot (#53)
- fixes possibly invalid memory access (#52)
- changes docker storage driver to overlay2 (#51)
- adds pcd file output of all pointcloud (#50)
- limits minimum beam_model likelihood (#49)
- separates point ranges of beam model and fixes total ref reduction (#48)
- makes acc measurement variance configurable (#47)
- fixes published tf timestamps to have a future date (#45)
- fixes docker caching on travis (#43)
- updates default parameters (#42)
- adds debug visualization output of casted ray (#41)
- fixes total reflection reduction (#40)
- rejects total reflection points in beam_model (#37)
- fixes test result handling and playback rate (#38)
- ignores travis run on non-master branch (#36)
- caches test dataset outside of docker
(#34)
- caches test dataset outside docker
- changes script path
- adds travis settings for a test in docker container (#33)
- adds localization accuracy test (#32)
- makes beam_model likelihood configurable (#30)
- removes ad-hoc map filter (#27)
- updates sample launch file
(#28)
- The commit enables:
- IMU measurement
- loading map from pcd file
- The commit enables:
- adds imu measurement (#26)
- adds hysteresis on final estimation (#24)
- updates parameters in sample launch file
(#23)
- removes map offset parameters
- specifies jump detection distance
- fixes axis-angle value range (#22)
- updates parameters in sample launch file (#19)
- fixes odometry error parameter handling (#18)
- fixes beam_model raycast origin (#17)
- adds parameter to specify odometry error
- adds sample launch file
(#14)
- This fixes #3.
- A dataset for testing will be supplied in future.
- adds documentation (#10)
- fixes init_yaw/pitch/roll setting (#12)
- ad hoc fix to a bug on PCL-1.7 with C++11
- fixes #9
- adds matched/unmatched pointclouds output (#7)
- fixes filter resetting in angular mode
- This commit fixes #2.
- makes map clipping parameters configurable
- fixes roll and pitch motion in prediction phase
- adds /amcl_pose output
- This commit fixes #1.
- applies LPF on debugging output pointcloud coordinate
- changes default map frame to 'map' instead of 'map_ground'
- outsources map update
- adds beam model
- makes z clipping parameters configurable
- adds parameter to skip measurement
- reduces almost invisible points in map
- checks localization covariance on map update
- detects pose jump and reset LPF
- makes some parameters configurable
- adds covariance calculation
- uses rpy variance instead of quat
- supports jump back
- fixes PointRepresentation dimension
- speed up by using radiusSearch instead of nearestKSearch
- improves prediction phase
- adds flexible particle operators
- removes garbage semicolons
- makes matching related parameters configurable
- makes several parameters configurable
- adds output filter
- adds weight in matching
- adds some parameters
- reduces number of points of updated map cloud
- adds particleBase::operator+
- clips and updates maps
- adds vec3::operator*
- adds arg to specify sigma to resampling
- avoids memory access error in max()
- supports tf and initialpose
- supports quat::inverse
- supports vec3::operator-
- updates test parameters
- update map cloud
- accumulates clouds
- fixes resampling
- first test version
- Contributors: Atsushi Watanabe
Wiki Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- without_imu [default: false]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noimu.yaml]
Messages
Services
Plugins
Recent questions tagged mcl_3dl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.6.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-15 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl
![]()
![]()
![]()
Package summary
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn’t implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test3.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test3.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.
MarkerArray shows several mcl_3dl internal information.
- Purple spheres: sampled points used in the likelihood-model calculation
- Red lines: casted rays in the beam-model calculation
- Red boxes: detected collisions in raycasting
To try global localization, call /global_localization by the following command.
rosservice call /global_localization
Demos without odometry and without IMU are also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Changelog for package mcl_3dl
0.6.4 (2024-10-10)
- Fix angular part of covariance matrix (#417)
- Contributors: f-fl0
0.6.3 (2024-07-22)
- Explicitly handle zero sigma (#414)
- Update assets to v0.6.4 (#413)
- Update assets to v0.6.3 (#412)
- Update assets to v0.6.2 (#411)
- Contributors: Atsushi Watanabe
0.6.2 (2023-11-14)
- Fix reported entropy (#408)
- Update assets to v0.6.1 (#407)
- Update assets to v0.6.0 (#406)
- Update assets to v0.5.2 (#405)
- Update assets to v0.5.1 (#404)
- Update assets to v0.4.2 (#402)
- Contributors: Atsushi Watanabe, f-fl0
0.6.1 (2023-01-04)
- Update assets to v0.4.1 (#400)
- Support PCL 1.11 and later (#397)
- Update assets to v0.4.0 (#395)
- Update assets to v0.3.4 (#392)
- Remove old workarounds for PCL<1.8 (#389)
- Update assets to v0.3.3 (#388)
- Update assets to v0.3.2 (#387)
- Update code format (#386)
- Contributors: Atsushi Watanabe
0.6.0 (2021-05-12)
- Add option to load cloud through "load_pcd" service (#381)
- Update assets to v0.3.1 (#382)
- Update assets to v0.3.0 (#380)
- Update assets to v0.2.0 (#379)
- Contributors: Atsushi Watanabe, Remco
0.5.4 (2021-03-07)
0.5.3 (2021-02-26)
- Fix cloud accum reset on map update (#371)
- Contributors: Atsushi Watanabe
0.5.2 (2021-01-15)
- Fix potential "Time is out of dual 32-bit range" error (#367)
- Update assets to v0.1.4 (#365)
- Improve test stability (#363)
- Update assets to v0.1.3 (#362)
- Update assets to v0.1.2 (#361)
- Migrate to GitHub Actions (#357)
- Update assets to v0.0.10 (#356)
- Contributors: Atsushi Watanabe
0.5.1 (2020-10-26)
- Make hit_range independent from grid size and fix DDA hit/miss state (#350)
- Fix crushing when lidar poses are out of map (#351)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.5.0 (2020-10-15)
- Fix crushing when new map is received (#347)
- Ease condition for test of PointCloudSamplerWithNormal (#344)
- Add faster raycast algorithm using DDA (#343)
- Contributors: Naotaka Hatao
0.4.0 (2020-10-07)
0.3.0 (2020-09-07)
- Switch beam model by map label field (#334)
- Update test script for latest catkin (#333)
- Remove references to sensor_msgs::PointCloud (#332)
- Update assets to v0.0.9 (#331)
- Improve expansion resetting/global localization test stability (#330)
- Fix global localization test parameter (#328)
- Avoid rate limit when fetching gh-ph-comment (#329)
- Update gh-pr-comment (#327)
- Retry codecov script download (#326)
- Improve test coverage (#325)
- Merge rostest coverage profiles (#324)
- Contributors: Atsushi Watanabe, f-fl0
0.2.5 (2020-05-27)
- Add validation for orientation of initial pose (#317)
- Update CI scripts (#318)
- Contributors: Atsushi Watanabe, Yuta Koga
0.2.4 (2020-05-08)
- Fix resampling failure of last particle (#313)
- Retry gpg keyserver on prerelease test (#312)
- Add filter class for Vec3 (#311)
- Refactor math functions (#310)
- Fix deprecation warning (#309)
- Split parameter loader code (#307)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.2.3 (2020-04-07)
- Update assets to v0.0.8 (#303)
- Fix flaky rostest nodes (#302)
- Update E2E test parameters (#301)
- Refactor CI scripts (#300)
- Add Noetic CI job (#296)
- Fix initialization of accumulated cloud header (#299)
- Support Noetic (#297)
- Contributors: Atsushi Watanabe
0.2.2 (2020-03-30)
- Make average number of accumulated clouds accurate (#293)
- Fix latching flag in demo bag (#294)
- Fix cloud accumulation logic (#290)
- Contributors: Atsushi Watanabe
0.2.1 (2020-02-03)
- Set DiagnosticStatus::OK as default (#283)
- Update assets to v0.0.7 (#282)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.2.0 (2020-01-18)
- Install consistent version of ros_buildfarm (#281)
- Run prerelease test with latest msgs package (#278)
- Expose internal errors and convergence status (#265)
- Document motion prediction model parameters (#277)
- Contributors: Atsushi Watanabe, Daiki Maekawa
0.1.7 (2020-01-06)
- Update assets to v0.0.6 (#273)
- Update assets to v0.0.5 (#272)
- Add catkin/bloom release actions (#269)
- Fix codecov setting (#270)
- Fix codecov config (#268)
- Migrate C math functions to C++ (#267)
- Enable particle initialization using covariances (#259)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.6 (2019-10-21)
- Clear odometry integration error on global localization (#257)
- Accelerate CI and prerelease test (#254)
- Contributors: Atsushi Watanabe
0.1.5 (2019-08-15)
- Split prerelease test job to avoid CI time-limit (#251)
- Speed-up covariance calculation during global localization (#248)
- Run prerelease test on release preparation PR (#246)
- Add a test for landmark measurement (#242)
- Add test case for expansion resetting service (#241)
- Test matched/unmatched debug outputs (#240)
- Add basic tests for State6DOF class (#239)
- Fix demo configuration and update README (#238)
- Add no-imu and no-odometry modes (#234)
- Add test case for obsolated compatibility mode (#237)
- Fix document file permission (#236)
- Add test for compatibility level check (#235)
- Fix ParticleFilter::resample() (#233)
- Drop ROS Indigo and Ubuntu Trusty support (#230)
- Disable CI build for indigo (#229)
- Refactor motion prediction models (#227)
- Refactor IMU measurement models (#226)
- Fix include directory priority (#225)
- Custom point type (#206)
- Fix transform object constness (#224)
- Add LICENSE file (#220)
- Add post-release test script (#218)
- Reduce memcpy in point cloud transform (#216)
- Contributors: Atsushi Watanabe, Naotaka Hatao
0.1.4 (2018-12-20)
- Fix IO figure (#212)
- Fix tf timestamp (#214)
- Add pf::ParticleFilter::appendParticle (#207)
- Fix pointer alignment style (#210)
- Migrate tf to tf2 (#208)
- Fix class member naming style (#205)
- Make lidar measurement model class (#195)
- Add I/O diagram to the document (#199)
- Update Algorithms.md (#198)
- Add apt-get upgrade to test Dockerfiles (#197)
- Add document for expansion resetting (#193)
- Add test for expansion resetting (#192)
- Add test for global localization (#188)
- Refactor likelihood calculation (#189)
- Add a comment to test_transform_failure (#184)
- Build mcl_3dl_msgs from source on CI (#185)
- Fix resampling (#183)
- Fix test failure on ROS buildfarm (#181)
- Fix catkin package definitions (#180)
- Add tf exception handling and change message level (#177)
- Relax codecov patch threshold (#179)
- Allow small coverage drop (#178)
- Fix test names (#176)
- Add build id to CI bot comment (#174)
- Fold CI bot comment (#173)
- Decrease bag playback rate in integration test (#172)
- Add test for NormalLikelihoodNd (#171)
- Report coverage only after successful test (#170)
- Add CI badges (#169)
- Add codecov covarage test (#168)
- Fix bot comment target slug (#167)
- Contributors: Atsushi Watanabe, So Jomura
0.1.3 (2018-06-23)
- Fix install of demo launch and config (#164)
- Update CI and add test on ROS Melodic (#155)
- Ignore gh-pr-comment failure (#162)
- Compile with PCL_NO_PRECOMPILE (#161)
- Fix rostest dependency (#160)
- Fix roslint dependency (#159)
- Update install instructions in README (#158)
- Update manifest format and fix CMakeLists (#157)
- Use mcl_3dl_msgs package (#152)
- Test with shadow-fixed repository (#154)
- Update CI bot environments (#150)
- Add encrypted token for image caching (#149)
- Fix migration instruction message (#147)
- Fix match ratio min/max check (#146)
- Add interfaces to ChunkedKdtree for external usages (#145)
- Install headers (#143)
- Contributors: Atsushi Watanabe
0.1.2 (2018-04-27)
- Workaround for debian stretch build (#140)
- Contributors: Atsushi Watanabe
0.1.1 (2018-04-25)
0.1.0 (2018-04-23)
- Migrate to ROS recommended namespace model (#130)
- Minor CI setting updates (#129)
- Fix package deps (#127)
- Fix dockerfile style (#125)
- Load CI cache from docker hub registry
(#124)
- also add build matrix
- Add raycast performance benchmark (#123)
- Fix GLOBAL_LOCALIZATION status (#122)
- Add localization status output (#120)
- Fix nodehandle usage (#121)
- Update demo without odometry
(#119)
- Update demo without odometry
- Update README
- Add document of the demo without odometry
- Move sample parameters in launch into yamls (#72)
- Fix time jump back
(#117)
- Fix time jump back
- Add warning of time jump
- Fix tf error check
- Add unit tests for Raycast
(#116)
- Add unit tests for Raycast
- Fix raycast grid handling
- Chunked kd-tree
(#113)
- Add chunked kd-tree to remove map truncation
- Remove unused params
- Remove unused debug output
- Add unit test for ChunkedKdtree
- Update test reference checksum (#114)
- Fix raycast collision tolerance
(#112)
- Tolerance of the end of the raycast was too small in 1a758c0 because of the increase of the search range.
- Add integral angular odometry error constraint (#111)
- Fix raycast (#110)
- Hit was checked by using range search with (grid/2.0) which make a lot of miss detection. (sqrt(2.0) * grid / 2.0) should be good approximation.
- Add rule based expansion resetting (#109)
- Fix integral odom error debug output (#108)
- Add landmark measurement input (#107)
- Fix map update timer (#105)
- Fix CI bot (#104)
- Fix repository url
- Use pip version of the bot
- Remove spinOnce polling and waitForTransform
(#102)
- Use ros::Timer instead of ros::spinOnce polling
- Remove waitForTransform for static transforms
- Remove waitForTransform for buffered (delayed) objects
- Fix particle initialization (#101)
- Reset integral odometry error if jumped (#100)
- Add constraint on the integral of odometry error
(#99)
- odom_err_integ_tc: time constant to hold the integral of the odometry error
- odom_err_integ_sigma: acceptable range of the integral of the odometry error
- Visualize sampled points and raycasting result
(#97)
- Visualize sampled points and raycasting result
- Remove duplicated code around raycasting
- Fix raycasting accuracy (#96)
- Fix odometry noise function in prediction (#95)
- Add global localization (#91)
- Fix particle resize
(#92)
- same fix as #90
- Fix resampling for huge particle size
(#90)
- All-zero particles have appeared on resampling if the particle size is very large.
- Also, add iterator.
- Add test for pf::ParticleFilter. (#89)
- Build test with -Wall -Werror.
(#88)
- Build test with -Wall -Werror.
- Workaround for invalid macro name bug in PCL(<1.8.1).
- Fix odometry noise function.
(#87)
- wrong: [nd(mean = 1.0, sigma = sigma_trans_trans) * nd(mean = 1.0, sigma = sigma_rot_trans)]{.title-ref}
- corrected: [nd(mean = 0.0, sigma = sigma_trans_trans) + nd(mean = 0.0, sigma = sigma_rot_trans)]{.title-ref}
- Skip random points sampling if all points are filtered out. (#86)
- Fix build on indigo. (#84)
- Add map_clip_far param. (#85)
- Support variable particle size.
(#78)
- Support variable particle size.
- Add service to change particle size.
- Add test for resizeParticle.
- Check input cloud size.
(#82)
- Check for empty cloud to avoid failure on kdtree build.
- Fix usage of point size of pcl::PointCloud.
- Remove debug outputs. (#81)
- Use online version of test result comment bot. (#80)
- Fix const function attributes. (#77)
- Remove dummy dep to system_lib. (#76)
- Add unit tests for mathematical classes.
(#74)
- Add unit tests for Vec3, Quat, NormalLikelihood, Filter classes.
- Fix scaling of the NormalLikelihood distribution.
- Fix Filter::set in angle mode.
- Fix naming styles.
(#73)
- Names of the classes and their members now get compatible with ROS recommended coding styles.
- Public member variables are kept without underscore postfix.
- Fix package install. (#71)
- Fix assert of sampled point amount check. (#70)
- Fix quaternion average and use expectation as estimation result. (#67)
- Fix bot's test result posting on fail. (#68)
- Include test result on bot post. (#66)
- Fix a bug where all particle probabilities get zero.
(#65)
- fix number of selected points for likelihood calculation
- add error recovering / asserts
- fixes coding styles (#64)
- adds parameter to accumulate input clouds (#60)
- syncs tf timestamp with last odometry (#61)
- adds example without odometry (#57)
- updates default params and demo (#55)
- adds option to disable tf publish and test for tf output (#46)
- adds test result notifier bot (#53)
- fixes possibly invalid memory access (#52)
- changes docker storage driver to overlay2 (#51)
- adds pcd file output of all pointcloud (#50)
- limits minimum beam_model likelihood (#49)
- separates point ranges of beam model and fixes total ref reduction (#48)
- makes acc measurement variance configurable (#47)
- fixes published tf timestamps to have a future date (#45)
- fixes docker caching on travis (#43)
- updates default parameters (#42)
- adds debug visualization output of casted ray (#41)
- fixes total reflection reduction (#40)
- rejects total reflection points in beam_model (#37)
- fixes test result handling and playback rate (#38)
- ignores travis run on non-master branch (#36)
- caches test dataset outside of docker
(#34)
- caches test dataset outside docker
- changes script path
- adds travis settings for a test in docker container (#33)
- adds localization accuracy test (#32)
- makes beam_model likelihood configurable (#30)
- removes ad-hoc map filter (#27)
- updates sample launch file
(#28)
- The commit enables:
- IMU measurement
- loading map from pcd file
- The commit enables:
- adds imu measurement (#26)
- adds hysteresis on final estimation (#24)
- updates parameters in sample launch file
(#23)
- removes map offset parameters
- specifies jump detection distance
- fixes axis-angle value range (#22)
- updates parameters in sample launch file (#19)
- fixes odometry error parameter handling (#18)
- fixes beam_model raycast origin (#17)
- adds parameter to specify odometry error
- adds sample launch file
(#14)
- This fixes #3.
- A dataset for testing will be supplied in future.
- adds documentation (#10)
- fixes init_yaw/pitch/roll setting (#12)
- ad hoc fix to a bug on PCL-1.7 with C++11
- fixes #9
- adds matched/unmatched pointclouds output (#7)
- fixes filter resetting in angular mode
- This commit fixes #2.
- makes map clipping parameters configurable
- fixes roll and pitch motion in prediction phase
- adds /amcl_pose output
- This commit fixes #1.
- applies LPF on debugging output pointcloud coordinate
- changes default map frame to 'map' instead of 'map_ground'
- outsources map update
- adds beam model
- makes z clipping parameters configurable
- adds parameter to skip measurement
- reduces almost invisible points in map
- checks localization covariance on map update
- detects pose jump and reset LPF
- makes some parameters configurable
- adds covariance calculation
- uses rpy variance instead of quat
- supports jump back
- fixes PointRepresentation dimension
- speed up by using radiusSearch instead of nearestKSearch
- improves prediction phase
- adds flexible particle operators
- removes garbage semicolons
- makes matching related parameters configurable
- makes several parameters configurable
- adds output filter
- adds weight in matching
- adds some parameters
- reduces number of points of updated map cloud
- adds particleBase::operator+
- clips and updates maps
- adds vec3::operator*
- adds arg to specify sigma to resampling
- avoids memory access error in max()
- supports tf and initialpose
- supports quat::inverse
- supports vec3::operator-
- updates test parameters
- update map cloud
- accumulates clouds
- fixes resampling
- first test version
- Contributors: Atsushi Watanabe
Wiki Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- without_imu [default: false]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noimu.yaml]