No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.

|
pal_vision_segmentation package from pal_vision_segmentation repopal_vision_segmentation |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
The pal_vision_segmentation package provides segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure.
Additional Links
No additional links.
Maintainers
- Bence Magyar
Authors
- Bence Magyar
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:

Object template
In order to segment the pringles pot based on its color an image template like the following one is required:

histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
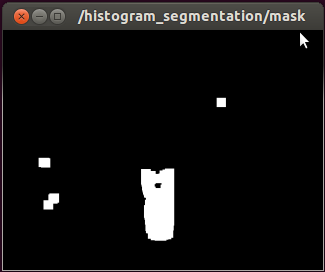
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
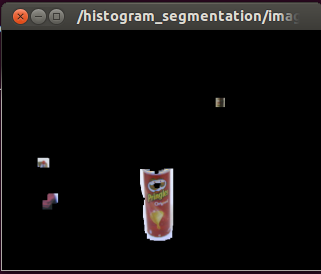
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CHANGELOG
Changelog for package pal_vision_segmentation
1.0.0 (2014-07-15)
- Add depth_segmentation node
- Do not show images unless explicit argument in unit test
- Remove ros init from test
- Timestamp is taken from the original image
- Contributors: Bence Magyar, Jordi Pages, Mariia Dmitrieva
0.0.1 (2014-05-30)
- Cleanup and readme before release
- First catkin version of pal_vision_segmentation
- Contributors: Bence Magyar, Jordi Pages
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| stereo_image_proc | |
| cv_bridge | |
| dynamic_reconfigure | |
| geometry_msgs | |
| image_transport | |
| roscpp | |
| catkin |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged pal_vision_segmentation at Robotics Stack Exchange
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.