
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
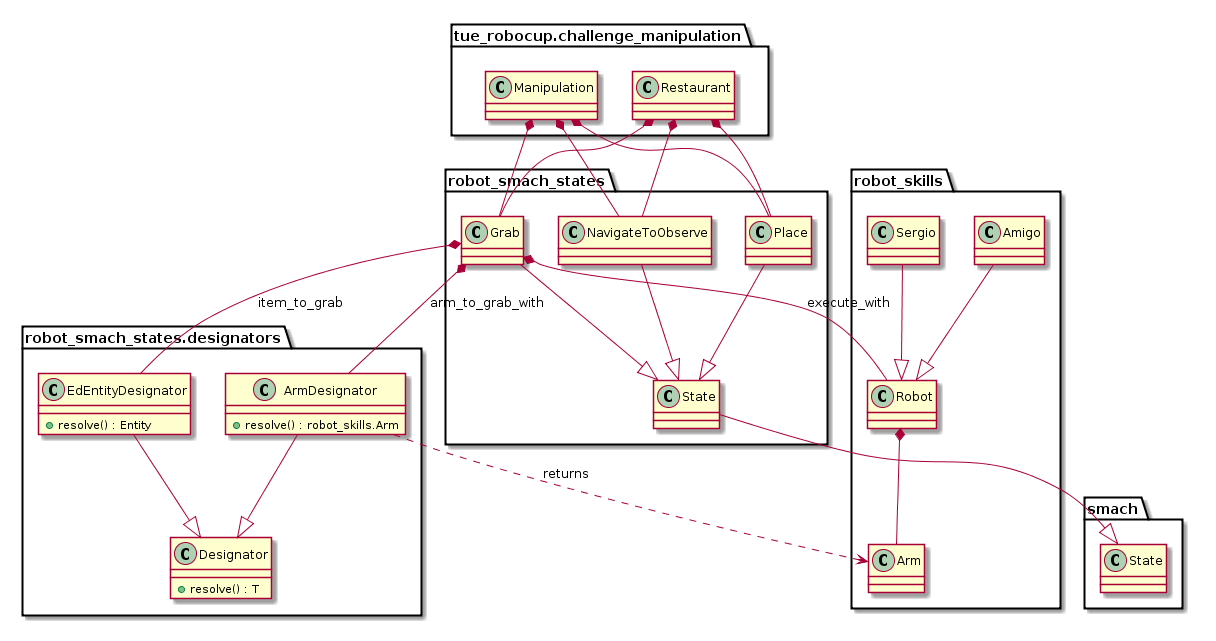
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged robot_smach_states at Robotics Stack Exchange
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tue-robotics/tue_robocup.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-26 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Sjoerd van den Dries
Authors
robot_smach_states
Robot_smach_states is a library of, indeed, smach states and state machine, built using the SMACH state machine library from ROS.
There are states concerning navigation, perception, world modeling/reasoning, complex and simple arm movements, speech recognition, and some more. Each state is passed an instance of the Robot-class from the tue-robotics/robot_skills-package. The actions called via the robot_smach_states are implemented and executed via such a Robot-object.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rospy | |
| robot_skills | |
| smach | |
| smach_ros | |
| geometry_msgs | |
| ed_msgs | |
| ed_python | |
| std_msgs | |
| actionlib | |
| cb_base_navigation_msgs | |
| python_orocos_kdl | |
| pykdl_ros | |
| tf_conversions | |
| tf2_geometry_msgs | |
| tf2_ros | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| test_tools |