
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
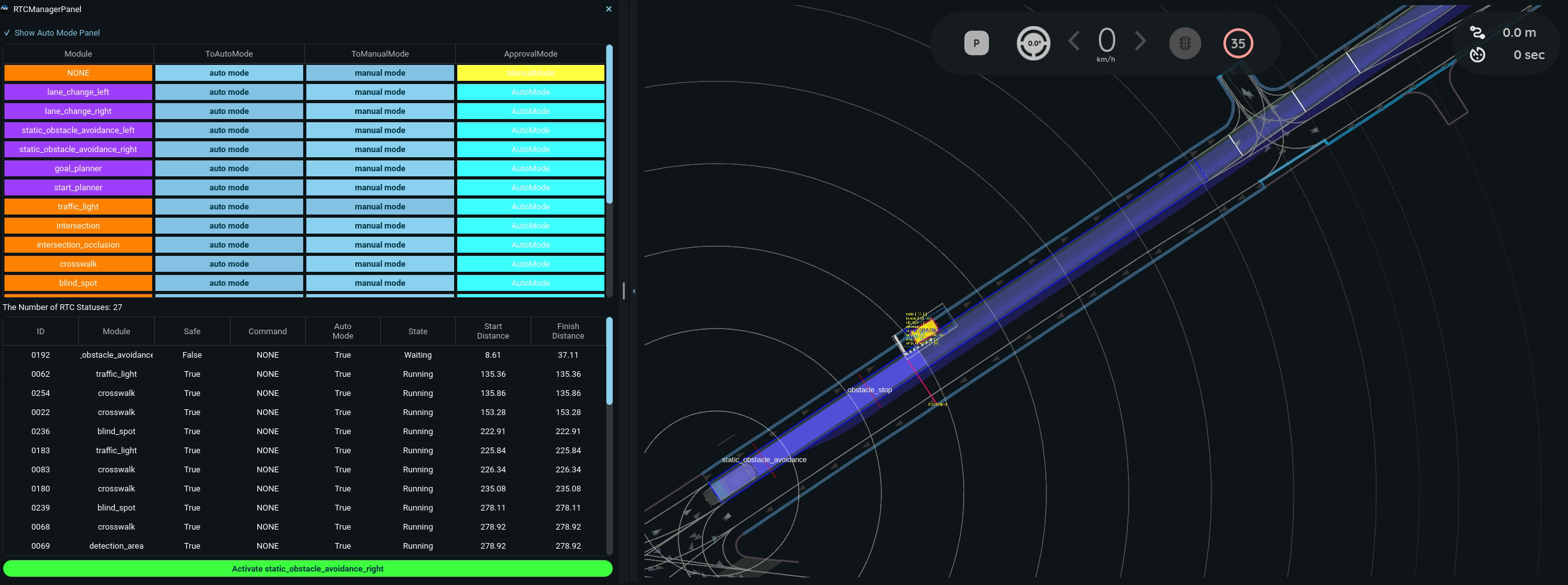
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
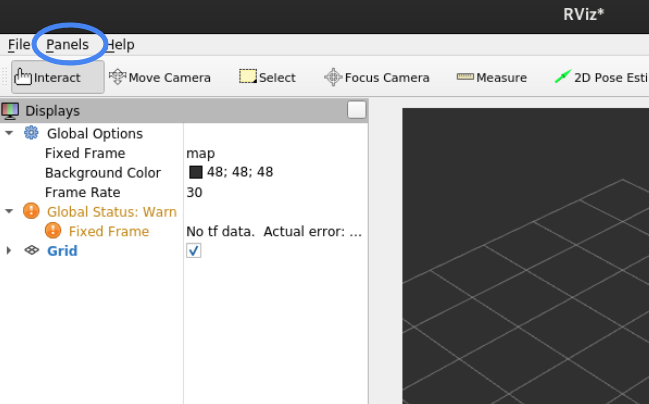
HowToUse
-
Start RViz and select Panels > Add New Panel.
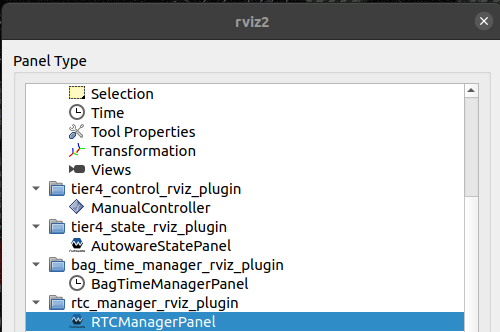
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rtc_manager_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Tomoya Kimura
- Satoshi Ota
- Mamoru Sobue
Authors
rtc_manager_rviz_plugin
Purpose
The purpose of this RViz plugin is to provide a graphical interface for managing RTC (Request To Cooperate) functionality:
- Display RTC status for each cooperate module (ID, Module, Safe, Command, AutoMode, State, StartDistance, FinishDistance).
- Switch each module between Auto mode and Manual mode.
- Send cooperate commands by button (Activate the front module).
Features
- Auto Mode Panel: Toggle visibility with “Show Auto Mode Panel” checkbox. Displays a table of modules with buttons to switch between Auto/Manual mode.
- Status Table: Shows real-time status of all RTC modules including distance information.
- Activate Button: Sends an ACTIVATE command to the nearest activatable module (modules that are not yet activated, not in auto mode, and have positive start distance).
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/external/get/rtc_status |
tier4_rtc_msgs::msg::CooperateStatusArray |
The statuses of each Cooperate Commands |
/api/external/get/rtc_auto_mode |
tier4_rtc_msgs::msg::AutoModeStatusArray |
The auto mode statuses for each module |
Output
| Name | Type | Description |
|---|---|---|
/api/external/set/rtc_commands |
tier4_rtc_msgs::srv::CooperateCommands |
The Cooperate Commands for each planning |
/planning/enable_auto_mode/* |
tier4_rtc_msgs::srv::AutoMode |
The service to switch Auto/Manual mode for each module |
HowToUse
-
Start RViz and select Panels > Add New Panel.
-
Select rtc_manager_rviz_plugin/RTCManagerPanel and press OK.
-
The panel will appear with:
- A checkbox to show/hide the Auto Mode Panel
- Auto Mode Table (if visible) with buttons to switch each module between Auto/Manual mode
- Status Table showing all RTC module statuses
- Activate button to send ACTIVATE command to the front activatable module
Changelog for package rtc_manager_rviz_plugin
0.6.0 (2026-02-14)
- fix(rtc_manager_rviz_plugin): introduce RTC_MIN_START_DISTANCE for module activation logic (#338)
- Contributors: Yukinari Hisaki
0.5.0 (2025-12-30)
-
fix(rtc_manager_rviz_plugin): refine module activation logic in RTCManagerPanel (#326)
-
feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality (#322)
- feat(rtc_manager_rviz_plugin): simplify enhance UI and code quality
* docs(rtc_manager_rviz_plugin): update README with enhanced features and usage instructions ---------
-
Contributors: Yukinari Hisaki
0.4.0 (2025-11-16)
- chore: add maintainers (#293) chore: add maintaiers
- Contributors: Fumiya Watanabe
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(rtc_manager_panel): add cooperateStatus state column (#104)
- add another column
* fix
-
chore(rtc_manager_panel): update module name (#29)
- chore(rtc_manager_panel): update module name
* chore(gitignore): remove py cache ---------
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| rclcpp | |
| rviz_common | |
| tier4_external_api_msgs | |
| tier4_planning_msgs | |
| tier4_rtc_msgs | |
| unique_identifier_msgs |