
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
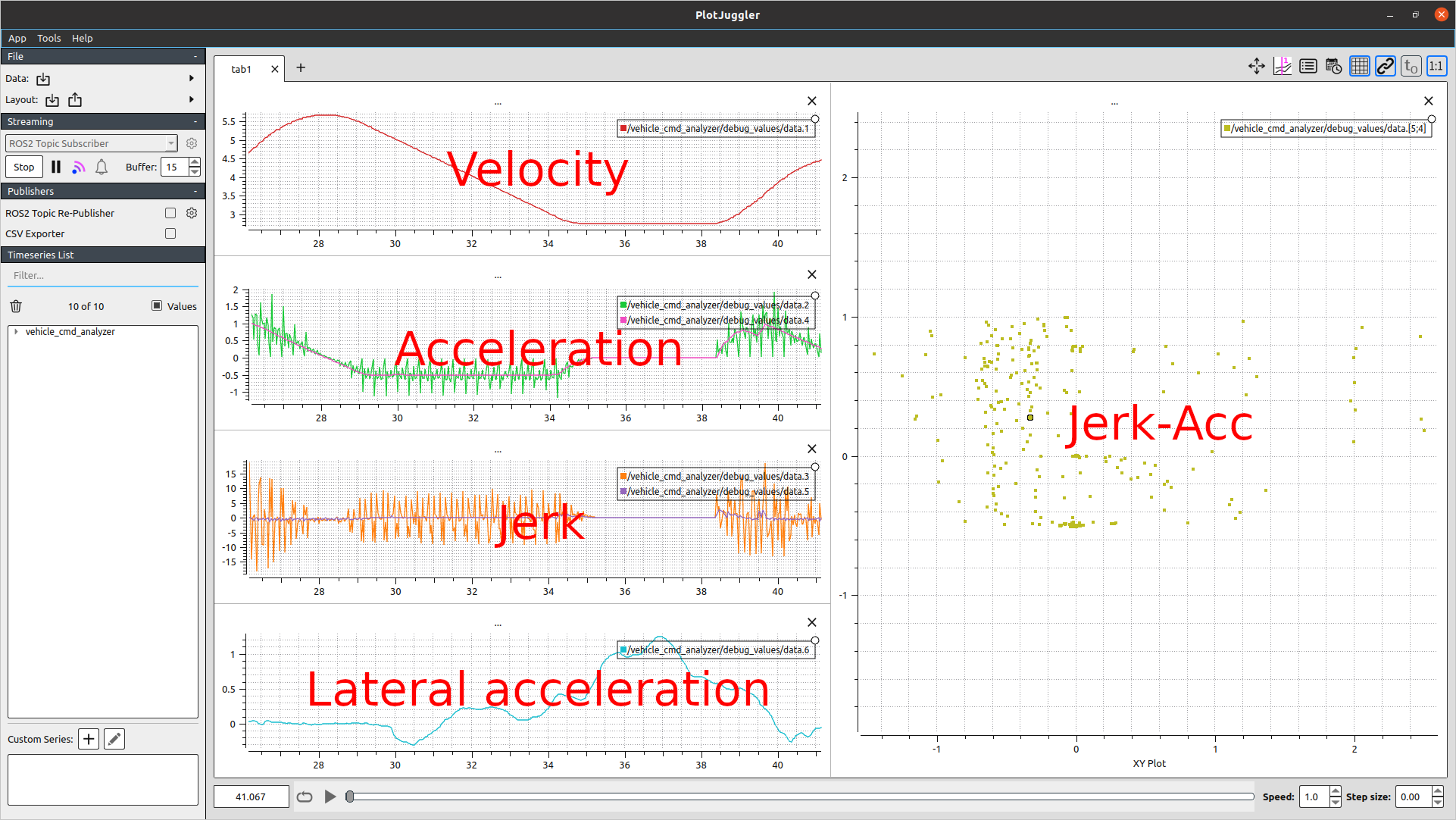
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
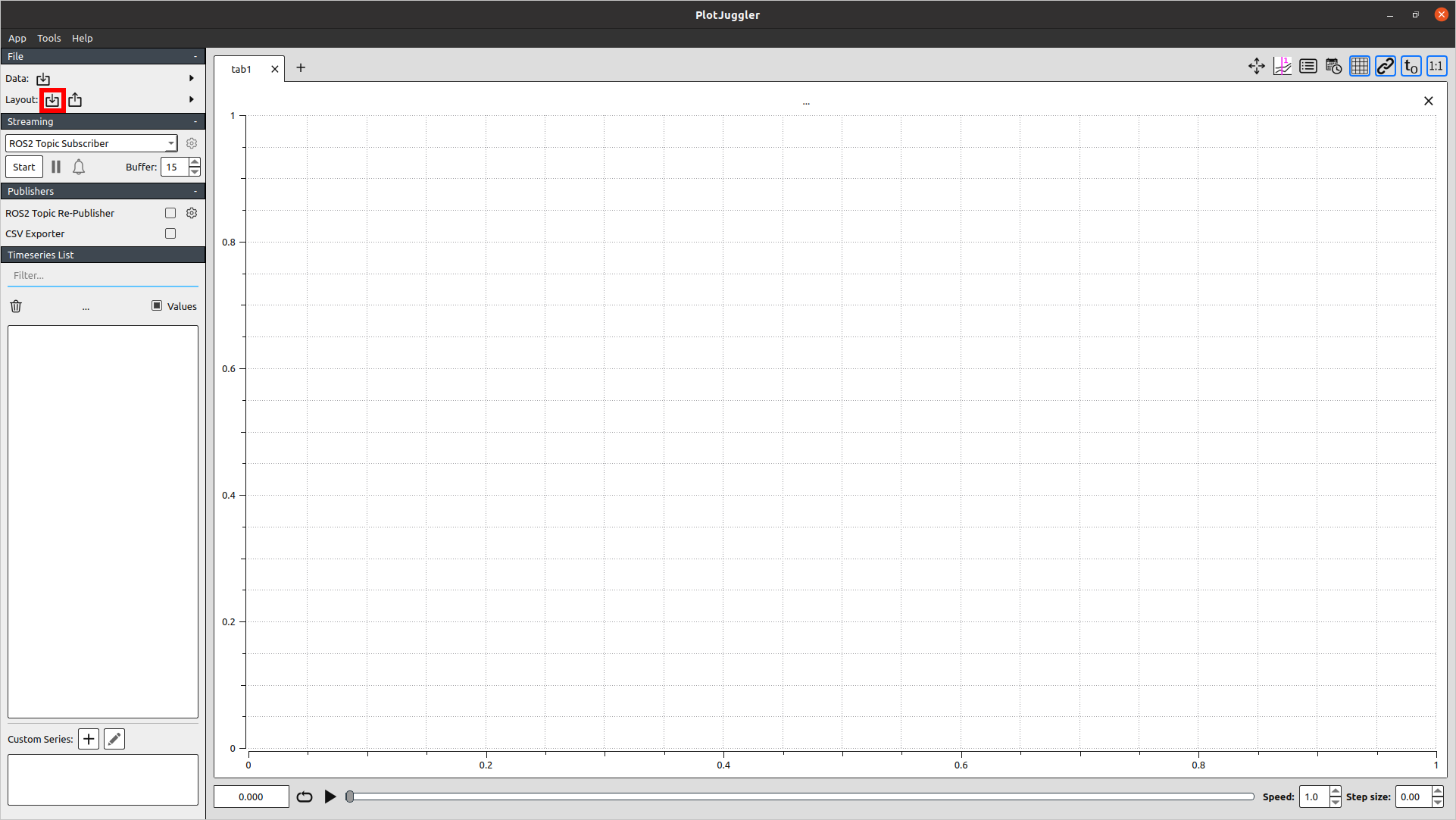
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.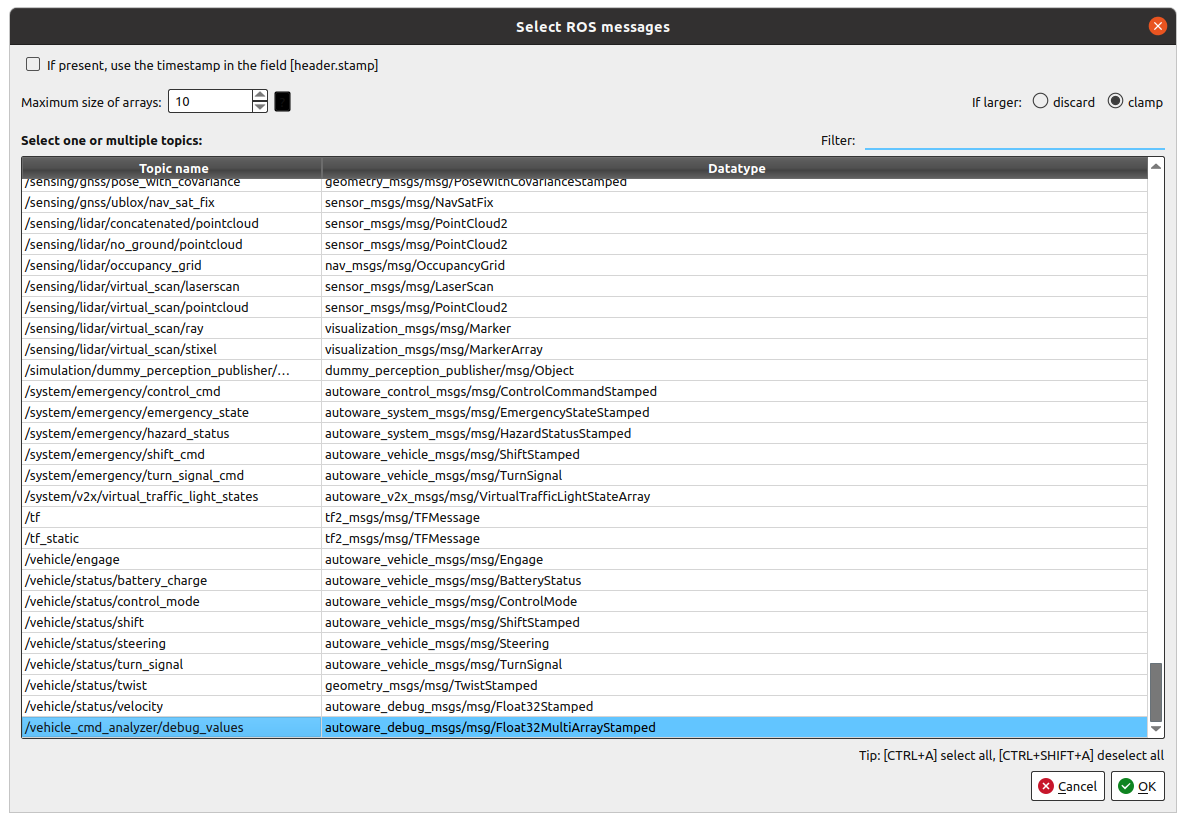
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]
Messages
Services
Plugins
Recent questions tagged vehicle_cmd_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- taichihirano
Authors
Vehicle Command Analyzer description
Overview
This is a visualization tool for vehicle commands. You need plotjuggler to plot.
The following time series data will be plotted on the left side.
- Velocity
- Acceleration (acceleration and derivative of velocity)
- Jerk (derivative of acceleration and second derivative of velocity)
- Lateral acceleration
The following data will be plotted on the right side.
- XY plot of jerk-acceleration
How to use
- Launch the node.
ros2 launch vehicle_cmd_analyzer vehicle_cmd_analyzer.launch.xml vehicle_model:=lexus
- Launch plotjuggler.
ros2 run plotjuggler plotjuggler
- Load layout.xml from File->Layout.
- Press ok in the confirmation dialog.
- Select
/vehicle_cmd_analyzer/debug_values.
Changelog for package vehicle_cmd_analyzer
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
- chore: sync files (#214)
- Contributors: awf-autoware-bot[bot]
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
feat(vehicle_cmd_analyzer)!: replace tier4_debug_msgs with tier4_internal_debug_msgs (#204)
-
refactor(global_parameter_loader): prefix package and namespace with autoware (#159)
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Esteve Fernandez, Ryohsuke Mitsudome, yabuta
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/vehicle_cmd_analyzer.launch.xml
-
- vehicle_cmd_analyzer_param_path [default: $(find-pkg-share vehicle_cmd_analyzer)/config/vehicle_cmd_analyzer.param.yaml]
- vehicle_model [default: lexus]