
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
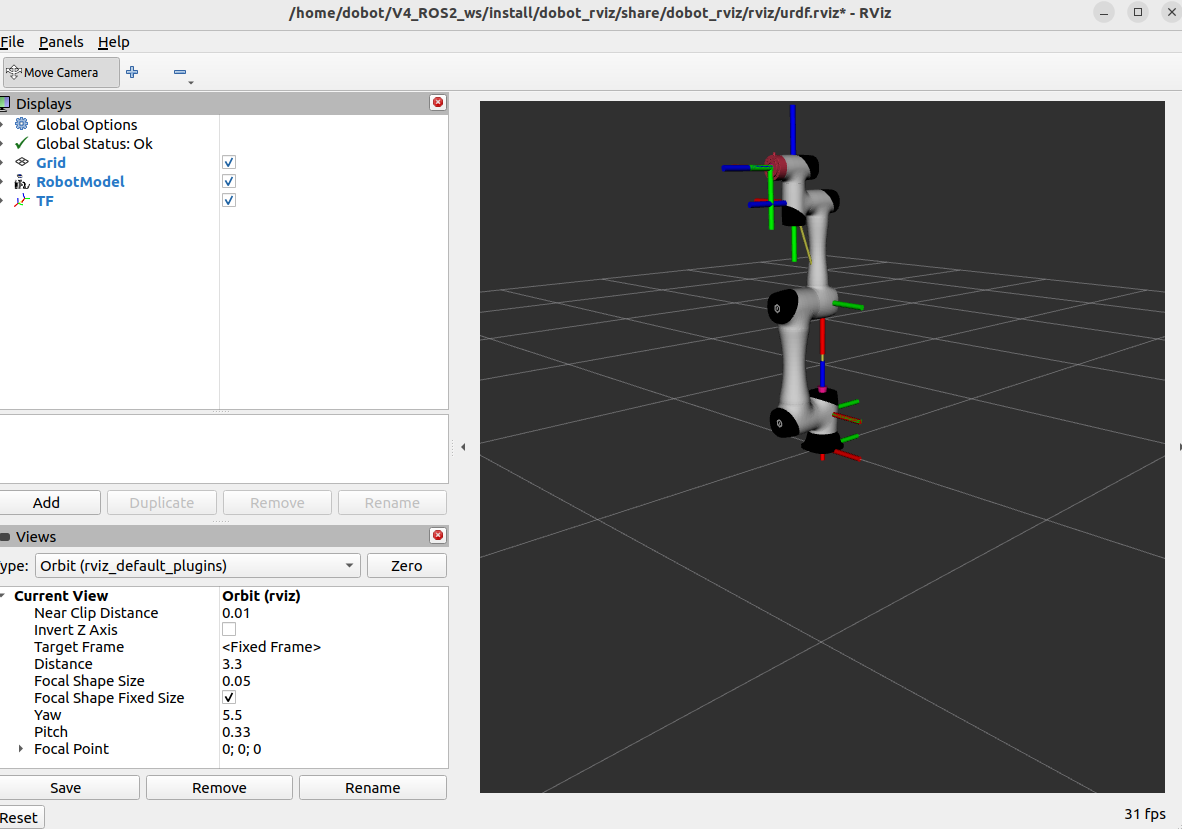
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
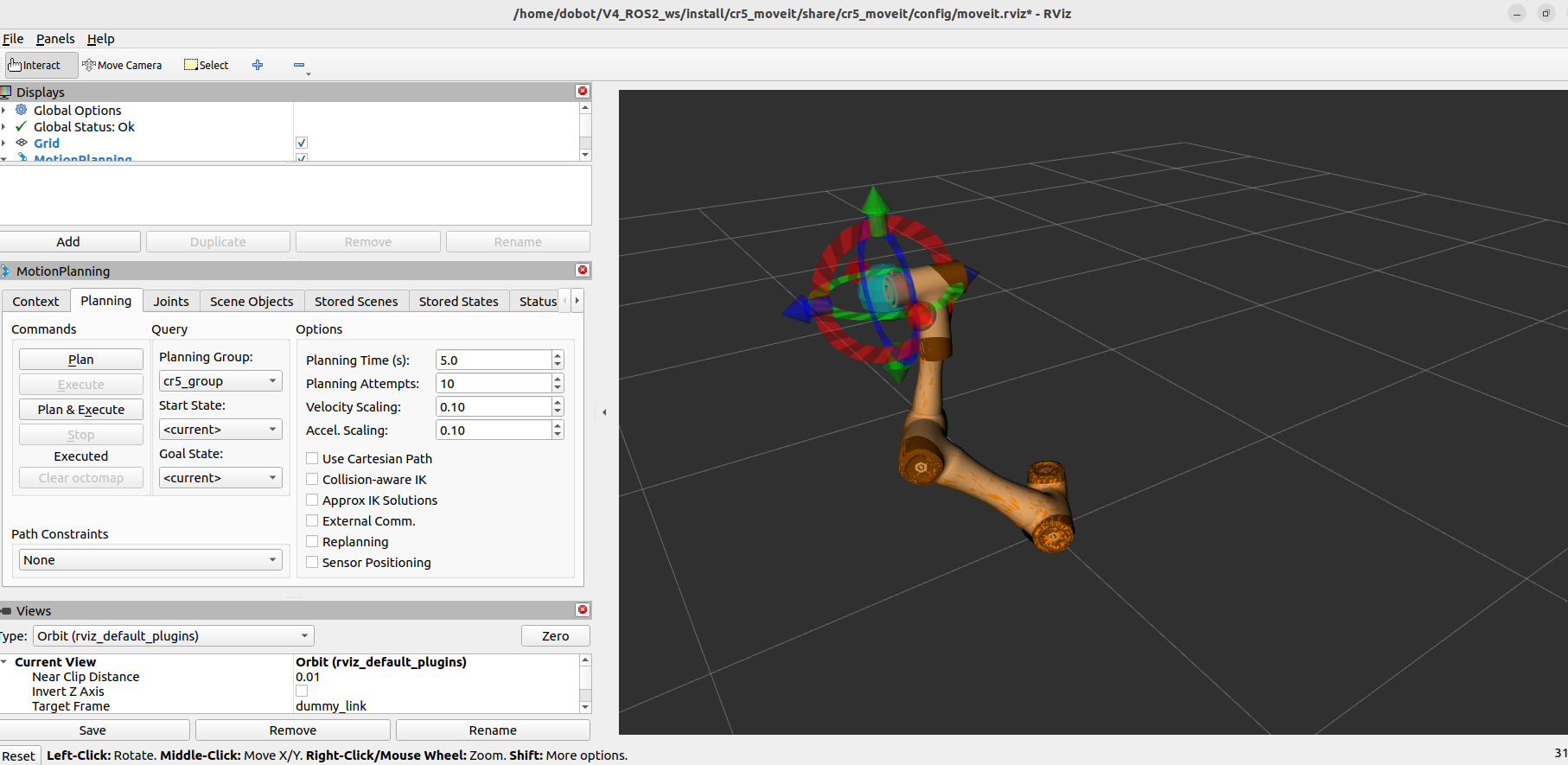
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
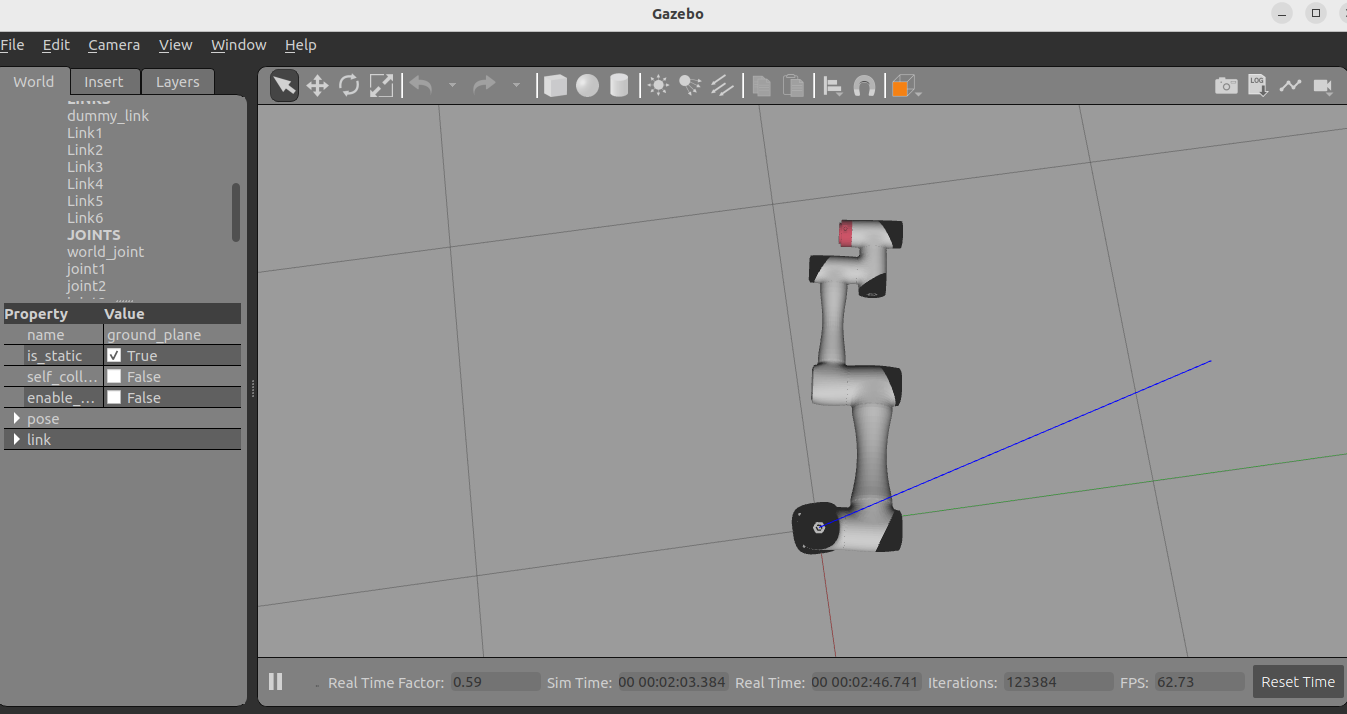
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
 —
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v4.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr10af_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr20_moveit | 0.3.0 |
| cr30h_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| cr_robot_ros2 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v4 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| me6_moveit | 0.3.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS2_V4 安装与配置指南
简介
DOBOT_6Axis-ROS2_V4 是 Dobot 公司基于 TCP/IP 协议开发的 ROS 软件开发套件(SDK)。该套件采用 ROS/C++ 和 Python 语言开发,遵循 Dobot-TCP-IP 控制通信协议,通过 Socket 与机械臂终端建立 TCP 连接,并提供简洁的 API 接口。用户可通过此套件快速连接 Dobot 机械臂,实现二次开发及控制功能。
前置条件
-
网络配置
-
有线连接:控制器 IP 为
192.168.5.1,需将电脑设置为同一网段的固定 IP。 -
无线连接:控制器 IP 为
192.168.1.6。 - 使用
ping命令测试控制器 IP 是否可达,确保网络连通性。
-
有线连接:控制器 IP 为
-
系统要求
- 操作系统:Ubuntu 22.04
- ROS 版本:ROS2 Humble
安装与配置步骤
1. 源码编译
- 下载源码:
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V4.git
cd ~/dobot_ws
- 编译源码:
colcon build
source install/local_setup.sh
- 设置环境变量:
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
- 配置机械臂连接 IP(默认为有线连接 IP):
echo "export IP_address=192.168.5.1" >> ~/.bashrc
- 指定机械臂型号(根据实际型号选择):
# 示例:CR5 型号
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
- 支持型号:CR3、CR5、CR7、CR10、CR12、CR16、CR20、E6(ME6)。
- 生效配置:
source ~/.bashrc
- 如需修改配置,可通过文本编辑器编辑
~/.bashrc文件。
功能演示
1. 仿真环境使用
- RViz 模型加载:
ros2 launch dobot_rviz dobot_rviz.launch.py
- 用于可视化机械臂模型。
- MoveIt 虚拟演示:
ros2 launch dobot_moveit moveit_demo.launch.py
- 拖动关节角度后,点击 “Plan and Execute” 查看运行效果。
- Gazebo 仿真:
ros2 launch dobot_gazebo dobot_gazebo.launch.py
- 启动 Gazebo 仿真环境。
-
Gazebo 与 MoveIt 联动:
- 启动 Gazebo 和 MoveIt:
ros2 launch dobot_gazebo gazebo_moveit.launch.py
ros2 launch dobot_moveit moveit_gazebo.launch.py
- 在 MoveIt 中拖动机械臂并执行 “Plan and Execute”,动作将同步至 Gazebo。
—
2. 控制真实机械臂
- 连接机械臂:
ros2 launch cr_robot_ros2 dobot_bringup_ros2.launch.py
File truncated at 100 lines see the full file