
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
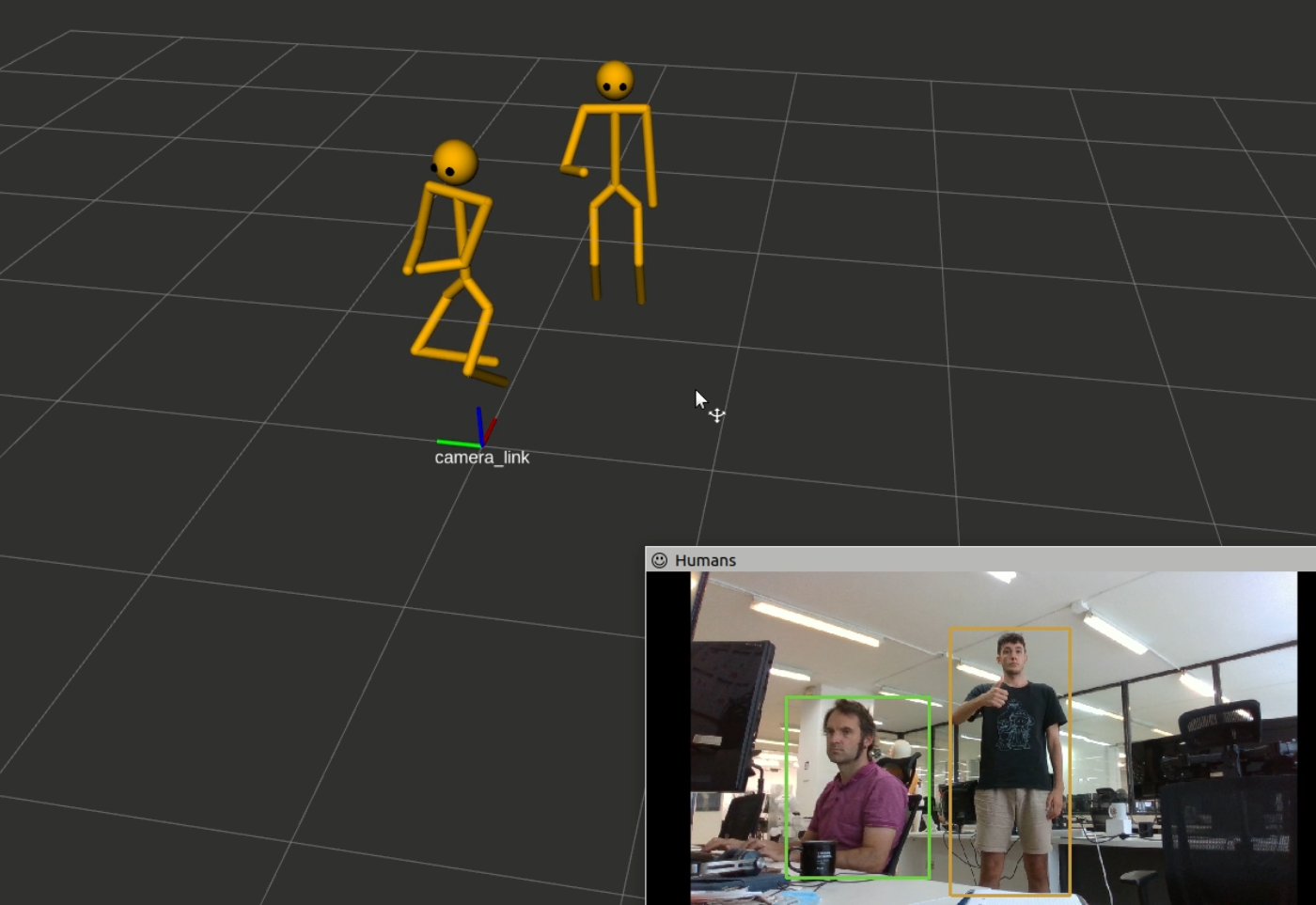
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged hri_fullbody at Robotics Stack Exchange
|
|
hri_fullbody package from hri_fullbody repohri_fullbody |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS4HRI-conformant node to track and extract 2D and 3D skeletons of humans from RGB/RGB-D cameras |
| Checkout URI | https://github.com/ros4hri/hri_fullbody.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-07-04 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Séverin Lemaignan
- Lorenzo Ferrini
Authors
- Séverin Lemaignan
- Lorenzo Ferrini
hri_fullbody
Overview
:warning: some of the links are yet to be updated and may be pointing to the original ROS page. As soon as all the involved components will be officially documented for ROS 2 as well, we will update this document.
hri_fullbody is a ROS4HRI-compatible
3D body pose estimation node.
It is built on top of Google Mediapipe 3D body pose estimation.
The node provides the 3D pose estimation for the detected humans in the scene, implementing a robust solution to self-occlusions.
This node can be used in two different modes: single body and multi-body.
In the former case, the node performs the whole body detection pipeline,
publishing information under the ROS4HRI naming convention regarding
the body id (on the /humans/bodies/tracked topic), the body bounding box,
and the jointstate of the body’s skeleton. In the latter, the node only
publishes jointstate information, expecting body detection to be performed
by another node and subscribing to /humans/bodies/tracked to read the ids
of the currently tracked bodies.
These two modes are required since Mediapipe body estimation
is not able to estimate more than one body pose per frame.
Therefore, in case we want more than one body pose estimated,
the adopted strategy is to rely on some other package implementing a human
body detection (and tracking in the best case) algorithm.
Such package should provide the hri_fullbody detect node the IDs of the
detected bodies and the relative images, cropped from the original image
following the detected bounding boxes.
To estimate the body position, the node does not need a RGB-D camera, only RGB is required. However, using RGB-D camera provides a more accurate depth estimation.
Important: to estimate the body depth without using a depth sensor, a calibrated RGB camera is required. You can follow this tutorial to properly calibrate your camera.
Launch
ros2 launch hri_fullbody hri_fullbody_with_args.launch.py <parameters>
ROS API
Parameters
Node parameters:
-
single_body(default:True): whether or not running in single body mode (see above for the single body vs multi-body modes). -
use_depth(default:False): whether or not to rely on depth images for estimating body movement in the scene. When this isFalse, the node estimates the body position in the scene solving a P6P problem for the face and approximating the position from this, using pinhole camera model geometry. -
stickman_debug(default:False): whether or not to publish frames representing the body skeleton directly using the raw results from mediapipe 3D body pose estimation. These debug frames are not oriented to align with the body links (ie, only the 3D location of the frame is useful). -
human_description_<body_id>(read-only): the URDF generated forbody_<body_id>. The node generates a URDF for each detected body and uses them to perform kinematically-consistent 3D body pose estimation.
hri_fullbody.launch parameters:
-
single_body(default:True): equivalent tosingle_bodynode parameter. -
use_depth(default:False): equivalent touse_depthnode parameter. -
stickman_debug(default:False): equivalent tostickman_debugnode parameter. -
rgb_camera(default: ` `): rgb camera topics namespace. -
rgb_camera_topic(default:$(arg rgb_camera)/image_raw): rgb camera raw image topic. -
rgb_camera_info(default:$(arg rgb_camera)/camera_info): rgb camera info topic. -
depth_camera(default: ` `): depth camera topics namespace. -
depth_camera_topic(default:$(arg depth_camera)/image_rect_raw): depth camera rectified raw image topic. -
depth_camera_info(default:$(arg depth_camera)/camera_info): depth camera info topic.
Topics
hri_fullbody follows the ROS4HRI conventions (REP-155). In particular,
refer to the REP to know the list and position of the 2D/3D skeleton
points published by the node.
Subscribed topics
File truncated at 100 lines see the full file
Changelog for package hri_fullbody
2.2.2 (2024-07-04)
- linting
- Contributors: Séverin Lemaignan
2.2.1 (2024-07-04)
- launch: use get_pal_configuration from launch_pal
- Contributors: Séverin Lemaignan
2.2.0 (2024-05-27)
- Updated topics naming convention in source code and configuration file. Fiexed bugs
- add configuration management
- removed unused import os
- Contributors: Luka Juricic, Raquel Ros, lorenzoferrini
2.1.1 (2024-05-21)
- removed old ros command
- Contributors: lorenzoferrini
2.1.0 (2024-05-07)
- Support 32bits depth
- Publish bodies' URDF on a topic instead of a parameter
- Contributors: ferrangebelli
2.0.1 (2024-04-24)
- add module
- Contributors: lorenzoferrini
2.0.0 (2024-02-14)
- removing bridging bug when using CvBridge.imgmsg_to_cv2 function without specifying the desired encoding to "bgr8", the returned image only had two channels if it's coming from the usb_cam node. Fixed the issue
- ros 2 porting
- clarify documentation for multibody case
- fix multibody diagnostics bug
- Contributors: Luka Juricic, lorenzoferrini
0.1.10 (2023-07-14)
- reset mediapipe backend in case of matrix inversion error
- Contributors: Luka Juricic
0.1.9 (2023-07-05)
- fix bug in left ear tragion publish
- change RoI message type to hri_msgs/NormalizedRegionOfInterest2D
- Contributors: Luka Juricic
0.1.8 (2023-05-23)
- disable publishing of face_XXX and gaze_XXX frames See comment in code for rationale
- Contributors: Séverin Lemaignan
0.1.7 (2023-05-18)
- diagnostic_msgs: exec_depend -> depend
- Contributors: Séverin Lemaignan
0.1.6 (2023-05-18)
- add diagnostics
- Contributors: lukajuricic
0.1.5 (2023-03-08)
- ensure mediapipe can not be called from 2 threads in parallel This would cause internal mediapipe errors related to non-monotonic timestamps
- Contributors: Séverin Lemaignan
0.1.4 (2023-02-03)
- Merge branch 'devel' into 'master' Revert "have threshold params" See merge request ros4hri/hri_fullbody!7
- Merge branch 'master' into 'devel' # Conflicts: # src/hri_fullbody/fullbody_detector.py
- Revert "have threshold params" This reverts commit 78264248652879a1b572397e8edeee6202685bc6 and commit 5cc5c34f7a93f8030623ff78945095778374cd36.
- Merge branch 'devel' into 'master' Introduced requirements.txt See merge request ros4hri/hri_fullbody!6
- Merge branch 'uncalibrated_monocular_camera' into 'master' Correctly managing uncalibrated camera See merge request ros4hri/hri_fullbody!5
- Introduced requirements.txt Introduced requirements.txt. Currently, the only requirement specified is ikpy. Using the requirements.txt file syntax, it was possible to specify the requested version, that is, 3.2.2
- Enabled human jointstate estimation for uncalibrated RGB cameras It
File truncated at 100 lines see the full file