
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
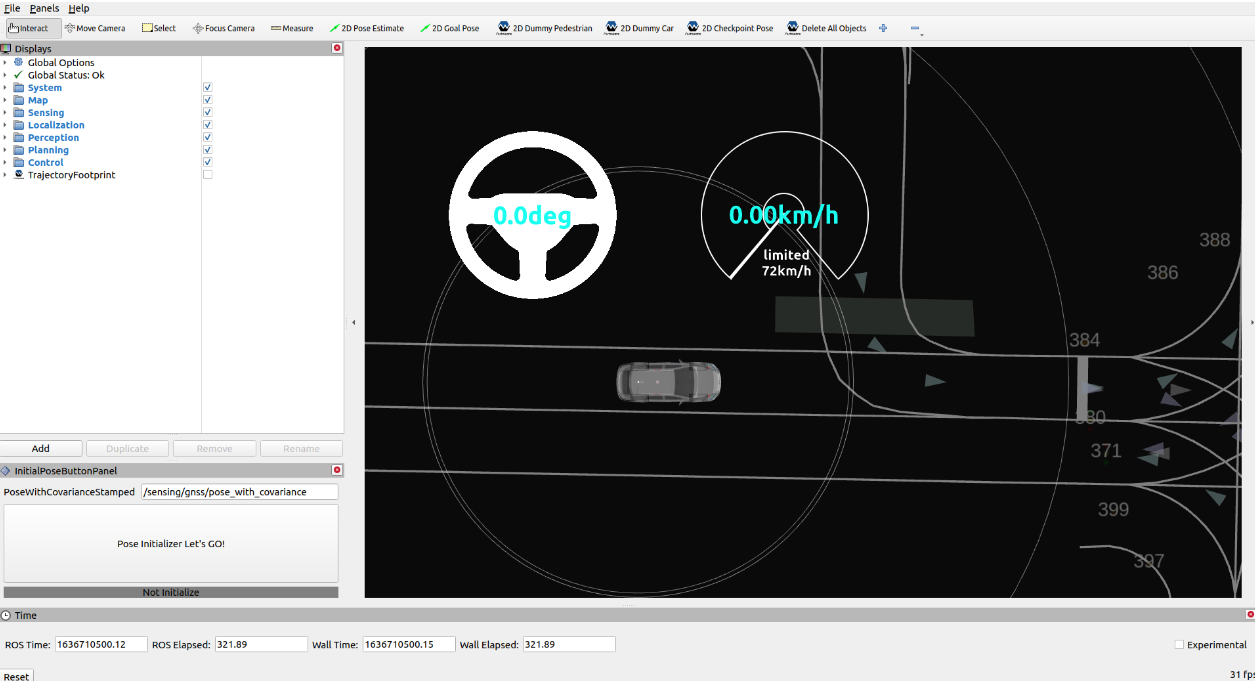
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged initial_pose_button_panel at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato ANDO
Authors
- Yamato ANDO
initial_pose_button_panel
Role
initial_pose_button_panel is the package to send a request to the localization module to calculate the current ego pose.
It starts calculating the current ego pose by pushing the button on Rviz, implemented as an Rviz plugin. You can see the button on the right bottom of Rviz.
Input / Output
Input topics
| Name | Type | Description |
|---|---|---|
/sensing/gnss/pose_with_covariance (default) |
geometry_msgs::msg::PoseWithCovarianceStamped | initial pose with covariance to calculate the current ego pose |
Package Dependencies
| Deps | Name |
|---|---|
| autoware_cmake | |
| ament_cmake_auto | |
| ament_lint_auto | |
| autoware_lint_common | |
| geometry_msgs | |
| rviz_common | |
| tier4_localization_msgs |