
|
jog_controller package from jog_control repojog_control jog_controller jog_launch jog_msgs |
Package Summary
| Tags | No category tags. |
| Version | 0.0.2 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai(TORK) Developer Team
Authors
- Ryosuke Tajima
jog_controller
This package contains controller nodes for jog control. For now, it has two indivisual nodes, ‘jog_joint_node’ and ‘frame_joint_node’.
Both nodes depend on MoveIt!, so you should make sure MoveIt! is available for your robot in advance.
Both nodes use PositionController which is provided by
ros_controllers/joint_trajectory_controller package.
jog_joint_node
‘jog_joint_node’ is for joint jogging. Joint jogging is to adjust the
target joint angle by small amount of displacement. You can send
JogJoint message
to command the target joint and differential angle (delta).
Subscribed topic
-
joint_states (sensor_msgs/JointState)
Current joint states (angle, velocity, acceleration)
-
jog_joint (jog_msgs/JogJoint)
Joint jog command
Required service / action
This package uses position_cotnroller to control joint angles. It read the controller configuration form MoveIt! parameter (move_group/controller_list), so MoveIt! should be available before this node starting.
-
follow_joint_trajecotry/goal (control_msgs/FollowJointTrajectoryAction)
The goal joint angle to control
jog_frame_node
‘jog_frame_node’ is for frame jogging. Frame jogging is to adjust the
target frame position and orientation by small amount of
displacement. You can send
JogFrame message
to command the target frame and differential displacement of position
and orientation.
Subscribed topic
-
joint_states (sensor_msgs/JointState)
Current joint states (angle, velocity, acceleration)
-
jog_frame (jog_msgs/JogFrame)
Jog command for target frame
Required service / action
This package depends on move_group of MoveIt! to compute kinematics.
-
/compute_ik
Service to get inverse kinematics by MoveIt!
-
/compute_fk
Service to get forward kinematics by MoveIt!
This package uses position_cotnroller to control joint angles. It read the controller configuration form MoveIt! parameter (move_group/controller_list), so MoveIt! should be available before this node starting.
-
follow_joint_trajecotry/goal (control_msgs/FollowJointTrajectoryAction)
The goal joint angle to control
Creating setting files for your own robot
You need a launch file and a configuration file your robot to use jog_controller. Let me show you the setting using ‘tra1’ robot as a example in the following description. You can install tra1 package as:
$ apt install ros-knetic-tra1-bringup
Create your own package
You are recommended to create your own package to store the configuration file.
$ catkin_create_pkg tra1_jog_config jog_controller tra1_bringup
Checking your robot configuration
jog_controller depends on MoveIt!, thus your robot need to work with MoveIt! already. Please check you have your moveit_config package such as ‘tra1_moveit_config’.
$ rospack find tra1_moveit_config
$ roscd tra1_moveit_config/config
Then you can check the Moveit! config file. First check the
tra1_controllers.yaml to see the joint list.
$ cat tra1_controllers.yaml
controller_manager_ns: controller_manager
controller_list:
- name: position_trajectory_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
It says the list of the joint in joints: field. Please note that you
may have two or more controllers in your robot and the joints are
separated in each controllers.
Then you can check the tra1.srdf. In this file, you can see the group name, and target link which are used in MoveIt!.
$ cat tra1.srdf
...
<group name="manipulator">
<chain base_link="base_link" tip_link="link_j6" />
</group>
...
It says it contains the group named ‘manipulator’ and target link is named ‘link_j6’. Please notice you may have multiple groups in dual arm robot.
Creating config YAML file
Create tra1_jog_config/config/tra1_jog.yaml file to set the parameters for each node.
jog_joint_node:
joint_names:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
jog_frame_node:
group_names:
- manipulator
link_names:
- link_j6
‘joint_names:’ should contain the joint names which you have seen in the MoveIt! config file. Only joints in this list are used in the jog control and you don’t need to specify unused joints. You cannot specify any joints not in the MoveIt! config file.
‘group_names’ should be a list of group name which you have seen in the MoveIt! config file. And ‘link_names:’ is a list of target frame which you want to control with jog_frame_node.
Creating launch file
Create the launch file as tra1_jog_config/launch/tra1_jog.launch .
<launch>
<arg name="use_joy" default="false"/>
<!-- Jog controllers -->
<rosparam command="load"
file="$(find tra1_jog_config)/config/tra1_jog.yaml"/>
<node name="jog_joint_node" pkg="jog_controller" type="jog_joint_node"/>
<node name="jog_frame_node" pkg="jog_controller" type="jog_frame_node"/>
<!-- Launch joypad -->
<include if="$(arg use_joy)" file="$(find jog_controller)/launch/joypad.launch">
<arg name="group_name" value="manipulator"/>
<arg name="frame_id" value="base_link"/>
<arg name="link_name" value="link_j6"/>
</include>
</launch>
If you want to use joypad to jog, you can set use_jog argument
true. Caution: joypad support is experimental.
Check the jog control with your robot
Check with rviz jog panel plugin
Fisrtly you should bring your own robot system and MoveIt!. It depends on how you created the system for your robot. With tra1, we can start the controller in simulation (loopback) mode as:
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
Now you can see the rviz window for MoveIt!.
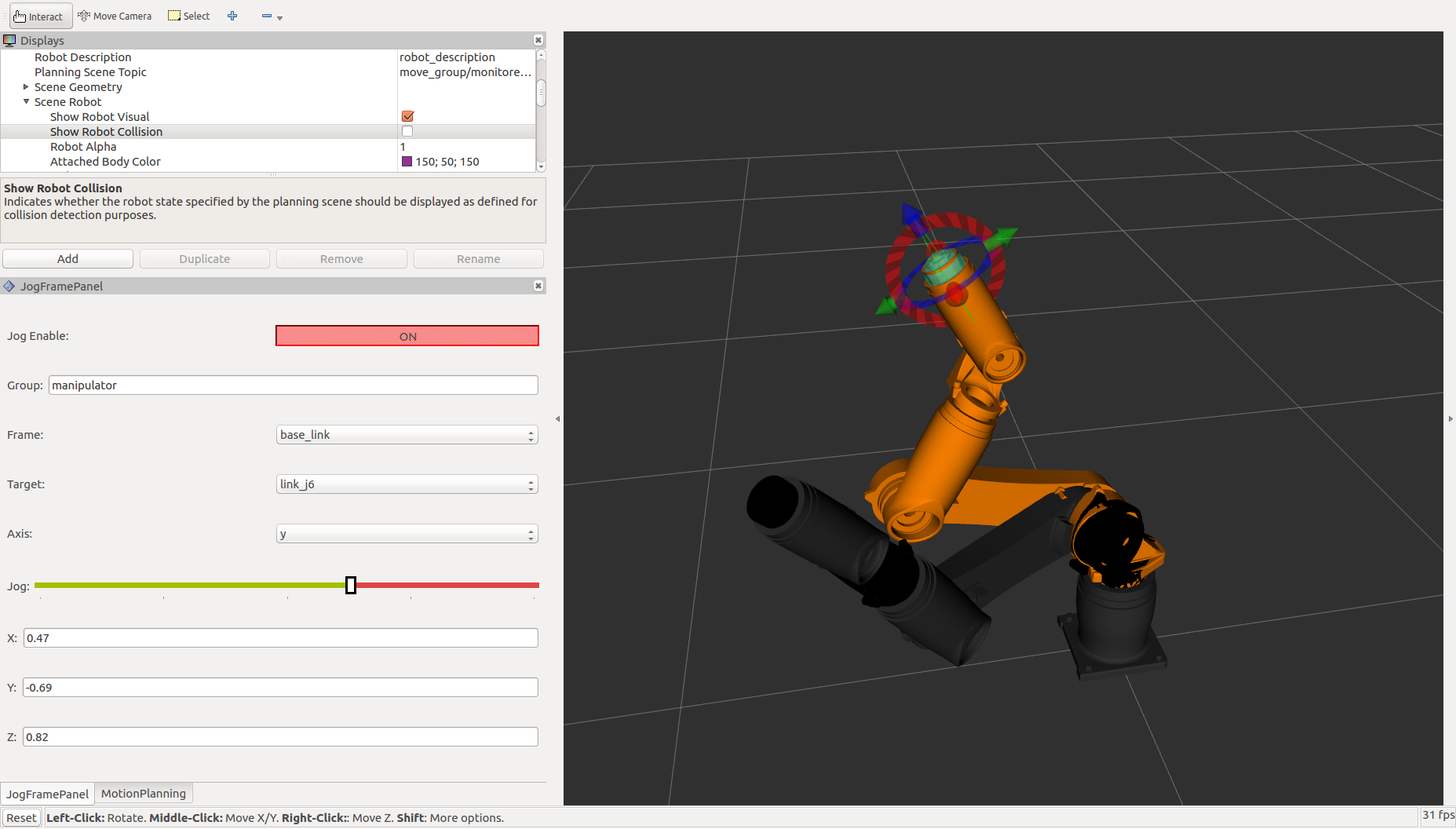
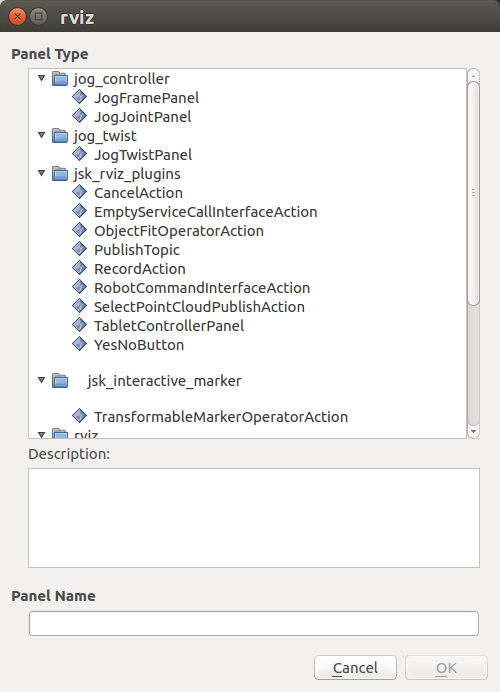
rviz jog control panel plugin
From rviz menu, you can choose “Panels” -> “Add New Panel”. You can see JogJointPanel and JogFramePanel in the list. Choose it and push “OK” button, and you can add the panels on the left side of you rviz window.
Please notice you can drag the panels to adjust the size and position in the rviz pane.
joypad
joypad.launch is the launch file to bringup joypad driver (joy node)
and the converter node (joy_to_jog_frame.py). This launch file has the
following arguments.
-
joy_dev(default: /dev/input/js0)The device file name of the joypad. Specify the defice file name of your joypad here. You can check your device by
ls /dev/inputcommand. -
joy_config(default: xbox_wireless)Configure file to setup button assignments. You can find an example in
config/xbox_wireless.config.yaml. Notice you need to modify the config file to fit your joypad device. -
group_name(default: manipulator)This is the MoveIt! group name to jog. It needs to be identical to the group name you want to use.
-
link_name(default: tool0)This is the link_name to jog. You need to specify a valid frame name in the group.
-
frame_idReference frame for frame jogging. You can specify valid frame name such as
base_link,tool0and so on.
Please check your joypad is available by launching joypad.launch.
$ roslaunch jog_controller joypad.launch
If you got error like:
[ERROR] [1533283649.439653297]: Couldn't open joystick /dev/input/js0. Will retry every second.
then check the joypad connection and you can see device file in
/dev/input/. Please note some joypad need to be powered on. (XBox
wireless has a silver power button shaped round ‘X’ in front of the
joypad.)
If you have no error, please check if the jog_frame topic is published.
$ rostopic echo /jog_frame
You need to push ‘Enable’ button which is set by the enable_button
parameter in the config file. You can see message like:
header:
seq: 751
stamp:
secs: 1531982605
nsecs: 330952195
frame_id: "base_link"
group_name: "manipulator"
link_name: "tool0"
linear_delta:
x: 0.0
y: -0.0
z: -0.0
angular_delta:
x: 0.0
y: 0.0
z: 0.0
avoid_collisions: True
and check your sticks produce desired message.
SpaceMouse
twist.launch is the launch file to bringup spacenav_node
and the converter node (twist_to_jog_frame.py). This launch file has the
following arguments.
-
joy_config(default: spacemouse_twist)Use the configuration file to setup the agruments. You can find an example in
config/spacemouse_twist.config.yamlThe config file has the following arguments:Argument Default Details scale_linear0.005 This is the linear speed multiplier scale_angular0.05 This is the angular speed multiplier dominant_modeTrue When the dominant mode is enabled, only the biggest absolute value is kept. axes_remapTrue Enable if a rotation matrix is required. rotation_matrixThe rotation matrix required to transform the space mouse input from it’s coordinate system to the target coordinate system. -
group_name(default: manipulator)This is the MoveIt! group name to jog. It needs to be identical to the group name you want to use.
-
link_name(default: tool0)This is the link_name to jog. You need to specify a valid frame name in the group.
-
frame_idReference frame for frame jogging. You can specify valid frame name such as
base_link,tool0and so on.
Please check your spacemouse is available by launching twist.launch.
$ roslaunch jog_controller twist.launch
If you have no error, please check if the jog_frame topic is published.
$ rostopic echo /jog_frame
You can see message like:
header:
seq: 751
stamp:
secs: 1531982605
nsecs: 330952195
frame_id: "base_link"
group_name: "manipulator"
link_name: "tool0"
linear_delta:
x: 0.0
y: -0.0
z: -0.0
angular_delta:
x: 0.0
y: 0.0
z: 0.0
avoid_collisions: True
and check your /spacenav/twist produce desired message.
Changelog for package jog_controller
0.0.2 (2019-09-16)
- Add [intermittent]{.title-ref} parameter
(#31 )
- When this parameter is true, jog motions wait for the end of previous action
- Implemented a twist_to_jogframe controller
(#39 )
- added optional arg to lauch the spacenav
- added missing dependency in package.
- Added Twist to jog frame missing launch file arg
- Update README.md
- Fix typos, renamed argument. Mod def scale values
- Asked modifications for pr.
- New method to tf from spacenav axis to EEF.
- Added missing launch file arg to ReadMe
- clean up of twist script
- fix to make it work
- tested joy control using space mouse
- Change validation message as ROS_ERROR
- Contributors: Alexandre Francoeur, LazyEngineerToBe, Ryosuke Tajima
0.0.1 (2018-08-30)
- Prepare for releasing (#28)
- Add further dpendency
- Migrating rostests from jog_controller to jog_launch (#27)
- Add waitForTransform for test code
- make it optional to specify controller_name (should be remove later)
- Remove unused variable
- add UR3 and UR3 rostest
- Adjust joypad scale for more safer control
- Add jog_launch package (#26)
- Remove running tests(transfer to jog_launch afterwards)
- Add settings for UR and tra1
- Add joypad descriptions (#24)
- Fix readme (#21)
- Add how-to description to jog_controller/README.md
- Add description into tra1_jog.yaml
- Add ur5 tests (#14)
- Expand queue size for solve test failure
- Add frame jog test for UR5
- Add test_jog_frame.py to test jog frame
- Add UR5 rostest for CMakeLists.txt
- Add UR5 gazebo test for joint_jog
- Change to test joint jog around a home position
- Change to handle the jog command with partial joint names
- Add initial test file for UR5
- Add config and launch files for hironx (#10)
- Set default use_joy argument false
- Support precise jog control (#13)
- Modify vs060 test
- Modify for precise jog_frame control
- Add test_jog_joint.py to test precise jog
- Checking with VS060
- Change to avoid loop in jog control
- Update reference joint state only if the jog command is not continuous
- Change jog panel not to publish command when the command is all zero
- Add param exclude joints (#9)
- add config and launch files for hironx.
- Add motoman_sda10f and update README
- Add baxter_fake.launch which use fake_joint_driver
- Add exclude_joint_names param to exclude joint
- Add support for multiple joint_states (#8)
- Add tests and travis (#7)
- Add test for baxter (hztest only)
- baxter_moveit_config is not released, so it remain disabled
- Give up TRA1 test until minas is fixed
- Add support for multiple joint_states
- ex. Baxter produces separated JointStates for grippers
- Add dependency on nextage_moveit_config
- Add exec dependency for nextage_ros_bridge
- Remove launch check templary for travis
- Add Nextage tests (hztest only)
- Fix build dependency
- Add hztest for TRA1
- Fix to obtain correct cinfo for jog_frame_node
- Fix to get first joint state message
- Fix the joy_to_jog_frame node to work
- Fix bug of invalid action name for use_action
- Baxter will get error because this bug
- Add orientation jog (#5)
- Improve display panel
- Add rotation jog
- Change the naming of JogJoint and JogFrame messages (#1)
- Change jog_msgs member name
- Add baxter settings, improve joint jog (#3)
- Improve joint jog node
- Support multiple controllers
- We just specify the list of joint to jog
- Fix Baxter settings
- Remove controller_name from joint jog setting
- Add baxter settings
- Add action option (#2)
- Add motoman_sia20d jog settings
- Change abb_irb2400 jog settings
- Add time_from_start parameter
- Add use_action option for jog joint node
- Change panel timer to 10Hz
- To avoid oscilation
- It may change the response
- Add abb_irb2400 settings
- Add use_action option
- Changes for jog(frame and joint) controllers
- Organize parameters
- Check to invalid IK solution
- Add settings for NEXTAGE Open
- Add settings for DENSO VS060
- Modify settings for MOTOMAN sia5d
- Modify setting for UR5 gazebo
- Modify setting for MELFA rv7fl
- Modify setting for TRA1 manipulator
- jog_frame_panel: move_group from list in parameter groups
- Add motoman_sia5d example
- Add jog_joint_panel rviz plugin
- Add documents, quickstart launch files
- Add jog_frame rviz panel plugin
- Add prototype of jog_joint_node
- Add jog_controller/jog_frame_node proto
- Contributors: Ryosuke Tajima, aislab
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| roslaunch | |
| catkin | |
| joy | |
| spacenav_node | |
| actionlib | |
| control_msgs | |
| jog_msgs | |
| moveit_core | |
| moveit_ros_planning | |
| moveit_visual_tools | |
| moveit_msgs | |
| roscpp | |
| rviz |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jog_control | |
| jog_launch |
Launch files
- launch/joypad.launch
-
- joy_config [default: xbox_wireless]
- joy_dev [default: /dev/input/js0]
- group_name [default: manipulator]
- link_name [default: tool0]
- frame_id [default: base_link]
- sub_topic [default: joy]
- launch/twist.launch
-
- joy_config [default: spacemouse_twist]
- group_name [default: manipulator]
- link_name [default: tool0]
- frame_id [default: tool0]
- sub_topic [default: spacenav/twist]
- launch_spacenav [default: true]