
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
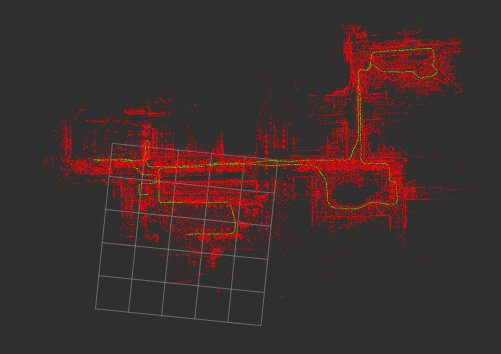
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]
Messages
Services
Plugins
Recent questions tagged pcl_localization_ros2 at Robotics Stack Exchange
Package Summary
| Version | 0.0.1 |
| License | BSD2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/qin-yuan/autoware_car.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- ryohei sasaki
Authors
pcl_localization_ros2
![]()
A ROS2 package of 3D LIDAR-based Localization using PCL.
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
IO
-
input
/cloud (sensor_msgs/PointCloud2)
/map (sensor_msgs/PointCloud2)
/initialpose (geometry_msgs/PoseStamed)(whenset_initial_poseis false)
/odom (nav_msgs/Odometry)(optional)
/imu (sensor_msgs/Imu)(optional) -
output
/pcl_pose (geometry_msgs/PoseStamped)
/path (nav_msgs/Path)
/initial_map (sensor_msgs/PointCloud2)(whenuse_pcd_mapis true)
params
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 2.0 | resolution size of voxels[m] |
| ndt_step_size | double | 0.1 | step_size maximum step length[m] |
| transform_epsilon | double | 0.01 | transform epsilon to stop iteration in registration |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_periad | double | 0.1 | scan period of input cloud[sec] |
| use_pcd_map | bool | false | whether pcd_map is used or not |
| map_path | string | “/map/map.pcd” | pcd_map file path |
| set_initial_pose | bool | false | whether or not to set the default value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu is used or not for point cloud distortion correction |
| enable_debug | bool | false | whether debug is done or not |
demo
demo data(ROS1) by Tier IV
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
Before running, put bin_tc-2017-10-15-ndmap.pcd into your map directory and
edit the map_path parameter of localization.yaml in the param directory accordingly.
rviz2 -d src/pcl_localization_ros2/rviz/localization.rviz
ros2 launch pcl_localization_ros2 pcl_localization.launch.py
ros2 bag play -s rosbag_v2 tc_2017-10-15-15-34-02_free_download.bag
Green: path, Red: map
(the 5x5 grids in size of 50m × 50m)
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/pointcloud_map_loader.launch.xml
-
- pointcloud_map_path [default: /home/robot/autoware_universe/autoware_sim_ws/src/autoware_slam/map/lio_sam_maps]
- pointcloud_map_loader_param_path [default: $(find-pkg-share pcl_localization_ros2)/param/pointcloud_map_loader.param.yaml]