
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
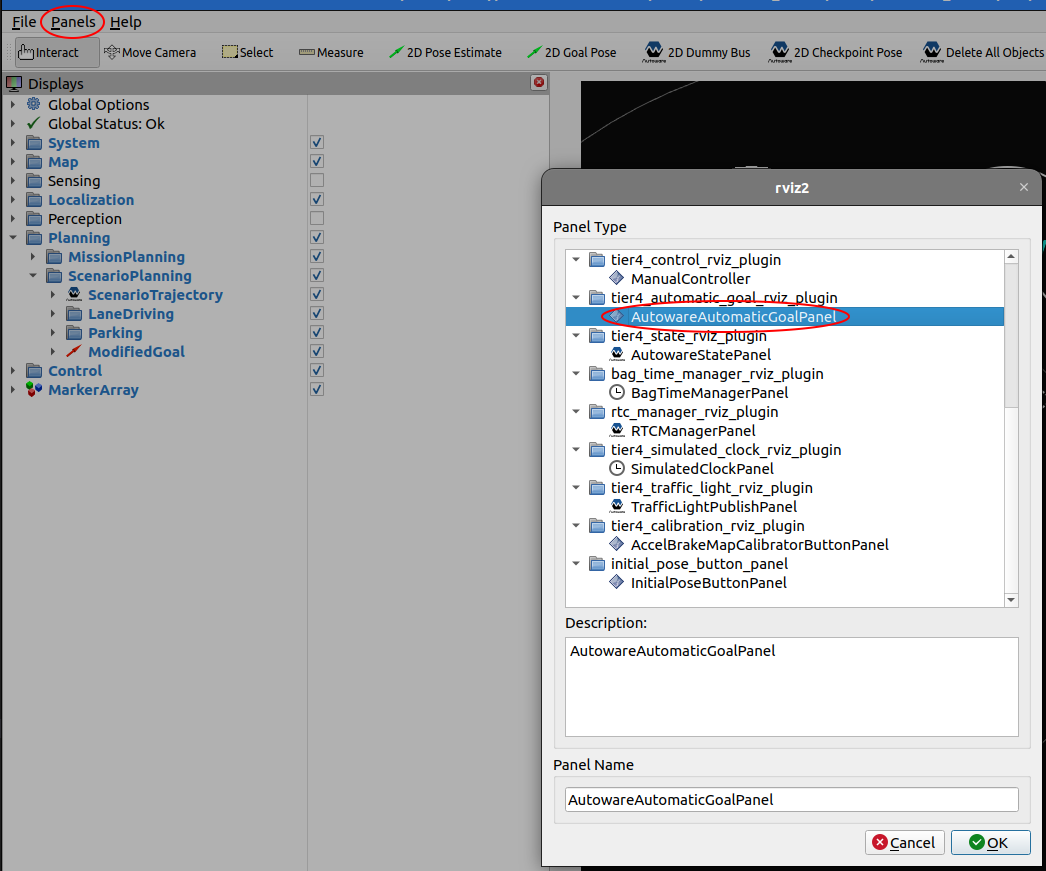
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.

-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays.
-
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically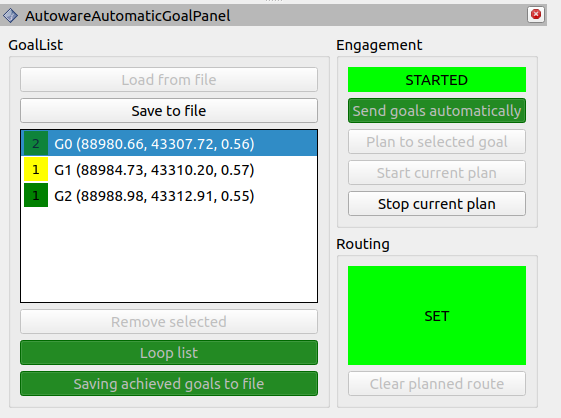
-
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]
Messages
Services
Plugins
Recent questions tagged tier4_automatic_goal_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shumpei Wakabayashi
- Dawid Moszyński
- Kyoichi Sugahara
- Satoshi Ota
Authors
- Dawid Moszyński
tier4_automatic_goal_rviz_plugin
Purpose
-
Defining a
GoalsListby adding goals usingRvizTool(Pose on the map). -
Automatic execution of the created
GoalsListfrom the selected goal - it can be stopped and restarted. -
Looping the current
GoalsList. -
Saving achieved goals to a file.
-
Plan the route to one (single) selected goal and starting that route - it can be stopped and restarted.
-
Remove any goal from the list or clear the current route.
-
Save the current
GoalsListto a file and load the list from the file. -
The application enables/disables access to options depending on the current state.
-
The saved
GoalsListcan be executed without using a plugin - using a nodeautomatic_goal_sender.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/rviz2/automatic_goal/goal |
geometry_msgs::msgs::PoseStamped |
The topic for adding goals to GoalsList |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/routing/set_route_points |
autoware_adapi_v1_msgs::srv::SetRoutePoints |
The service to set route |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/rviz2/automatic_goal/markers |
visualization_msgs::msg::MarkerArray |
The topic to visualize goals as rviz markers |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalPaneland press OK. -
Select Add a new tool.
-
Select
tier4_automatic_goal_rviz_plugin/AutowareAutomaticGoalTooland press OK. -
Add goals visualization as markers to
Displays. -
Append goals to the
GoalsListto be achieved using2D Append Goal- in such a way that routes can be planned. -
Start sequential planning and goal achievement by clicking
Send goals automatically -
You can save
GoalsListby clickingSave to file. -
After saving, you can run the
GoalsListwithout using a plugin also:- example:
ros2 launch tier4_automatic_goal_rviz_plugin automatic_goal_sender.launch.xml goals_list_file_path:="/tmp/goals_list.yaml" goals_achieved_dir_path:="/tmp/"-
goals_list_file_path- is the path to the savedGoalsListfile to be loaded -
goals_achieved_dir_path- is the path to the directory where the filegoals_achieved.logwill be created and the achieved goals will be written to it
-
- example:
Hints
If the application (Engagement) goes into ERROR mode (usually returns to EDITING later), it means that one of the services returned a calling error (code!=0).
In this situation, check the terminal output for more information.
- Often it is enough to try again.
- Sometimes a clearing of the current route is required before retrying.
Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.
Changelog for package tier4_automatic_goal_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
style: update rviz plugin icons to match the theme (#117)
-
feat: wait until autonomous mode is enabled (#74)
-
refactor(universe_utils/motion_utils)!: add autoware namespace (#59)
* refactor(universe_utils): add autoware namespace style(pre-commit): autofix
* refactor(motion_utils): add autoware namespace ---------
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- chore: sync files (#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- style: fix format of package.xml (#844)
- refactor: use autoware cmake (#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- fix(accel_brake_map_calibrator): rviz panel type (#895)
- fixed panel type
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/automatic_goal_sender.launch.xml
-
- goals_list_file_path [default: ]
- goals_achieved_dir_path [default: ]